Построение модели системы с цифровым регулятором в среде Scilab-5.5.2.
Порядок набора модели системы управления угловой ориентацией в среде Scilab-5.5.2 описан в лаб. раб. 5. Для построения модели системы с цифровым регулятором необходимо в качестве АЦП ввести дискретизаторы по времени и уровню, установив заданные величины дискрет по времени и уровню. Задать параметры системы и выполнить необходимые действия в соответствии с порядком выполнения лабораторной работы. Получить в графическом окне график переходного процесса в системе относительно сигнала рассогласования.
Параметры системы управления беспилотным летательным аппаратом
Передаточные функции каналов БПЛА как объекта управления



Передаточные функции каналов автопилота в дискретном виде
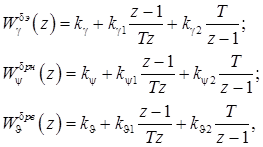
где T – дискрета времени.
Коэффициенты в дискретных передаточных функциях вычислены в лаб. раб. 7.
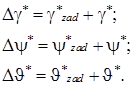
Датчики рассогласования
В качестве АЦП использовать стандартные модели дискретизаторов по времени и уровню в среде Scilab-5.5.2. ЦАП в цифровых каналах автопилота не использовать.
Дата добавления: 2017-10-04; просмотров: 1433;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- I. Ориентация формы в среде.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
