Структурная схема импульсной системы управления угловым движением БПЛА.
Структурная схема импульсной системы управления БПЛА по углам ориентации приведена на рис. 6.1.
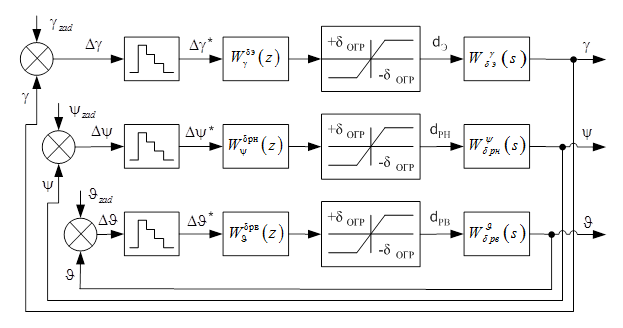
Рис. 6.1. Структурная схема импульсной системы
управления беспилотным летательным аппаратом
Положение БПЛА относительно горизонтальной плоскости определяется углами ориентации: углом крена  , углом рысканья
, углом рысканья  и углом тангажа
и углом тангажа  . Управление углами ориентации осуществляется изменением положения управляющих поверхностей БПЛА: элеронов
. Управление углами ориентации осуществляется изменением положения управляющих поверхностей БПЛА: элеронов  , руля направления
, руля направления  и руля высоты
и руля высоты  . Изменение углов ориентации при отклонении управляющих поверхностей определяется передаточными функциями
. Изменение углов ориентации при отклонении управляющих поверхностей определяется передаточными функциями



Отклонения управляющих поверхностей ограничиваются. Если  , то
, то  ; Если
; Если  , то
, то  ; Если
; Если  , то
, то  .
.
Углы ориентации  вычитаются из заданных углов
вычитаются из заданных углов  . Рассогласования углов
. Рассогласования углов  преобразуются в дискретную форму
преобразуются в дискретную форму  с использованием импульсного элемента
с использованием импульсного элемента  и формирователя
и формирователя 
Дискретные рассогласования углов поступают в каналы автопилота с дискретными передаточными функциями, записанными с использованием z-преобразования
где T – дискрета времени.
Коэффициенты в дискретных передаточных функциях вычислены в лаб. раб. 7. Для преобразования передаточных функций с непрерывным временем в дискретные передаточные функции можно воспользоваться символическими преобразованиями в среде Mathcad или готовыми таблицами дискретных передаточных функций типовых звеньев.
Процедура преобразования передаточной функции в дискретную форму в среде Mathcad выполняется в следующей последовательности:
– передаточную функцию в непрерывной форме  умножить на изображение единичной функции
умножить на изображение единичной функции  ;
;
– к полученной передаточной функции  в Mathcad последовательно выполнить: Символика/Трансформация/Инверсная Лапласа;
в Mathcad последовательно выполнить: Символика/Трансформация/Инверсная Лапласа;
– в полученной временной функции непрерывное время t заменить на дискретное  , где
, где  – период дискретизации;
– период дискретизации;
– к полученной функции с дискретным временем с переменной  в среде MathCad применить действия: Символика/Трансформация/z;
в среде MathCad применить действия: Символика/Трансформация/z;
– полученную дискретную функцию разделить на дискретную единичную функцию  ;
;
– полученный результат является дискретной передаточной функцией, записанной через z – преобразование;
– необходимо иметь в виду, при вычислении дискретной передаточной функции дифференцирующего звена исходную непрерывную передаточную функцию  необходимо разделить на дискрету времени .
необходимо разделить на дискрету времени .
Необходимо провести исследования импульсной системы стабилизации углов ориентации БПЛА. При несоответствии вычисленных показателей качества импульсной системы заданным, выполнить синтез автопилота, при котором заданные показатели качества обеспечиваются.
Дата добавления: 2017-10-04; просмотров: 1484;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- CRM - стратегия управления взаимоотношениями с клиентом
- Cдвиг ветра. Воздействие на взлёт и посадку ВС. Рекомендации по выполнению полётов и управлению воздушным движением в условиях сдвига ветра.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
