Структура системы управления беспилотным летательным аппаратом с люфтом в приводах и ограничениями отклонения управляющих поверхностей.
Структурная схема системы автоматического управления угловой ориентацией БПЛА приведена на рис. 7.1.
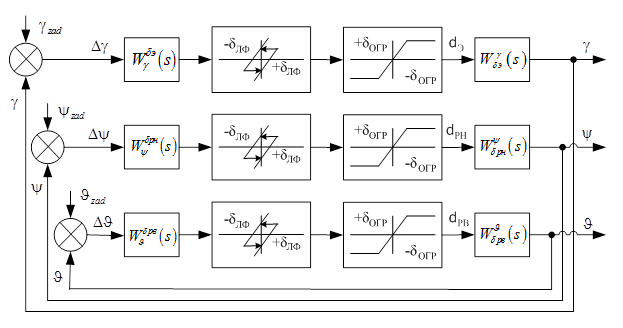
Рис. 7.1. Структурная схема автопилота ЛБЛА с люфтом в приводах
и ограничениями отклонения управляющих поверхностей
БПЛА на структурной схеме представлен передаточными функциями



Угловые рассогласования вычисляются сложением заданных углов с фактическими. Отрицательная обратная связь в контурах обеспечивается инверсией знака собственно летательным аппаратом, что следует из приведенных выше передаточных функций БПЛА.
Рассогласования углов поступают в автопилот, включающий в себя три канала управления: канал управления креном  , воздействием на элероны
, воздействием на элероны  , канал управления углом рысканья
, канал управления углом рысканья  , воздействием на руль направления
, воздействием на руль направления  , и канал управления углом тангажа
, и канал управления углом тангажа  , воздействием на руль высоты
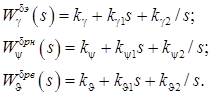
, воздействием на руль высоты  . Передаточные функции каналов автопилота синтезированы в лаб. раб. 5 и описываются передаточными функциями
. Передаточные функции каналов автопилота синтезированы в лаб. раб. 5 и описываются передаточными функциями
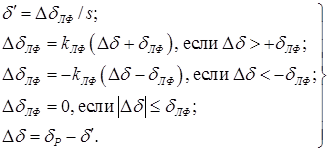
Однако углы поворота исполнительных органов БПЛА в точности не соответствуют углам, вычисленным автопилотом. Рассогласования вносят люфты в системе передачи углов и ограничения отклонений управляющих поверхностей. Люфт описывается системой уравнений:
 .
.
Отклонения управляющих поверхностей ограничиваются. Если  , то
, то 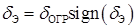 ; Если
; Если  , то
, то  ; Если
; Если  , то
, то  .
.
Необходимо исследовать влияние люфтов и ограничителей на качество работы системы. Выполнить исследование системы стабилизации углов ориентации БПЛА с заданными параметрами люфтов в приводах и ограничениями отклонений управляющих поверхностей. Если заданное качество управления не обеспечивается, то необходимо подобрать такие коэффициенты передачи в каналах автопилота, при которых заданное качество будет реализовано.
Дата добавления: 2017-10-04; просмотров: 1349;
Поиск по сайту
Узнать еще
- a-спираль b-складчатая структура
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
