Произвольно расположенных сил к данному центру
Приведением системы сил называется замена ее другой системой, эквивалентной первой, но более простой.
|
Теорема.Плоская система произвольно расположенных сил в общем случае эквивалентна одной силе, приложенной в центре приведения, и одной паре.
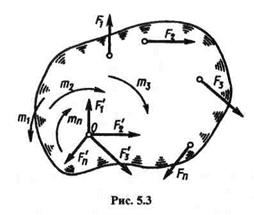
Пусть дана плоская система п произвольно расположенных сил (F1, F2, F3, ..., Fп-1, Fп). Перенесем параллельно все силы в произвольно выбранный в плоскости действия сил центр приведения О, добавив при этом п пар (рис. 5.3). Моменты этих пар т1, т2, т3, ..., тп,равны моментам данных сил относительно центра приведения О.
Вместо заданной системы п произвольно расположенных сил мы получили систему и сил, приложенных в центре приведения, равных данным силам по модулю и одинаковых с ними по направлению, и систему п присоединенных пар:

Эта новая система эквивалентна данной.
Плоская система сил, приложенных в одной точке, эквивалентна одной силе, которая равна векторной сумме этих сил и приложена в той же точке, следовательно,

|

|
или
Эту силу назовем главным вектором данной системы. Главный вектор плоской системы произвольно расположенных сил равен векторной сумме всех сил системы и приложен в центре приведения.
Графически главный вектор выражается замыкающей стороной силового многоугольника, построенного на данных силах. Аналитически модуль главного вектора можно вычислить по формуле
а направляющий косинус — по формуле

|
Плоская система пар эквивалентна одной паре, момент которой равен алгебраической сумме моментов данных пар, следовательно,

|
|
или
Эту пару с моментом Мглназовем главным моментом заданной системы сил.
Главный момент плоской системы произвольно расположенных сил равен алгебраической сумме моментов всех сил системы относительно центра приведения.
Таким образом, всякая плоская система сил в общем случае эквивалентна системе, состоящей из силы и пары сил, следовательно, теорема доказана.
Не следует считать, что главный вектор и главный момент имеют чисто формальное значение, введенное для удобства доказательства, и что их можно найти только с помощью вычислений. Нередко отдельно действующие на тело силы определить трудно или невозможно, а главный вектор или главный момент этих сил найти сравнительно легко. Так, например, число точек контакта и модули сил трения между вращающимся валом и подшипником скольжения, как правило, неизвестны, но главный момент этих сил можно определить простым измерением; второй пример: в характеристику электродвигателя входит не сила, с которой статор действует на ротор, а вращающий момент.
Дата добавления: 2021-09-07; просмотров: 644;
Поиск по сайту
Узнать еще
- II Раціональне розміщення продуктивних сил.
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. Специальные обороты речи, усиливающие воздействие рекламы
- III. Световоспринимающая и светопроводящая части глаза. Оптическая сила глаза. Аккомодация.
- IV. Эффект действия реактивных и инерционных сил
- LC – автогенератор на операционном усилителе
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- VI. Доступность и посильность в обучении.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
