ПРИМЕНЕНИЕ РСБН-2 В ПОЛЕТЕ
Угломерно-дальномерная система может быть применена в полете на любом участке трассы в зоне ее действия. Используется она по плану, намеченному в период подготовки к полету. В этом плане указывается, в каком режиме необходимо использовать систему на том или другом участке трассы и для решения какой навигационной задачи ее следует применять.
Рассмотрим методы использования системы и порядок работы с самолетным оборудованием при решении задач самолетовождения.
Определение места самолета с помощью РСБН-2. Для определения места самолета необходимо:
1. Включить самолетное оборудование системы, для чего АЗС с надписью «Свод» поставить в положение «Включено».
2. Поставить переключатель КППМ в положение «Свод». На самолетах Ан-24, на которых устанавливается РСБН-2, этот переключатель имеет два положения («Свод — СП-50») и предназначен для переключения КППМ из режима навигации в режим посадки.
3. Установить в положение «Выключено» переключатель «Посадка», расположенный на щитке пилота, и переключатель «Пробивание облачности», расположенный на щитке управления штурмана (рис. 3).
4. Установить на щитке управления штурмана номер канала работы наземного радиомаяка.
5. Прослушать позывные сигналы и убедиться, что система настроена на выбранный маяк.
Позывные сигналы наземного маяка передаются телеграфной азбукой и прослушиваются через СПУ. Громкость позывных сигналов регулируется потенциометром, расположенным на щитке пилота.
6. Установить переключатель рода работ в положение, соответствующее выбранному роду работы системы («Азимут», «Орбита», «СРП»).
7. Через 5—6 мин после включения системы проверить работоспособность самолетного оборудования и произвести калибровку шкал азимута и дальности.
8. В тот момент, когда необходимо определить место самолета, произвести отсчет азимута и дальности на ППДА и заметить время. Отсчет азимута на приборе штурмана производится по двум шкалам. Шкала грубого отсчета оцифрована от 0 до 360° с ценой деления 10°, а шкала точного отсчета имеет оцифровку от 0 до 10° с ценой деления 0,1°.
На ППДА пилота азимут отсчитывается только по грубому каналу. Цена одного деления на шкале этого прибора равна 2. Дальность до маяка системы определяется по счетчику, позволяющему отсчитать текущую дальность с точностью до 0,1 км.
9. Отложить на карте от радиомаяка отсчитанный азимут и на его линии дальность (рис. 18.4). Полученная точка даст место самолета к моменту отсчета азимута и дальности.
Достоинством РСБН-2 является то, что она непрерывно указывает место самолета в любом из режимов работы («Азимут», «Орбита», «СРП») и даже тогда, когда переключатель рода работ будет поставлен в положение «КПП выключен». В этом положении переключателя система выдает на ППДА текущие координаты, а КППМ отключается.
Непрерывное указание координат места самолета системой позволяет с большей точностью решать основные задачи самолетовождения. Выполнение полета от наземного радиомаяка. Полет от радиомаяка может быть выполнен в том случае, когда линия заданного пути строго совпадает с направлением от радиомаяка. Для выполнения полета от радиомаяка необходимо:
1. Включить самолетное оборудование системы и подготовить его к работе по заданному радиомаяку.
Рис. 3. Органы управления РСБН-2: 1 — щиток пилота; 2 — блок управления счетно-решающего прибора (БУ СРП); 3 — щиток управления штурмана
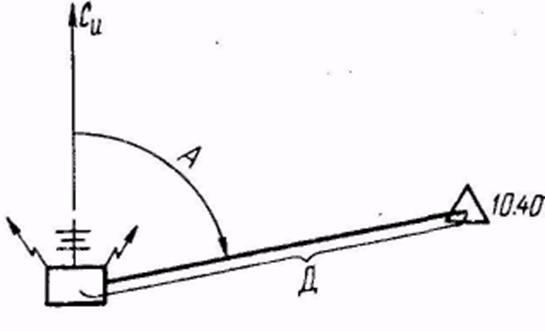
Рис. 4. Определение места самолета
2. Установить на щитке управления штурмана:
а) номер канала работы наземного радиомаяка;
б) переключатель рода работ в положение «Азимут от»;
в) ручкой «Азимут» значение азимута, равное ЗИПУ;
г) ручкой «Орбита» дальность от маяка до пункта, момент пролета которого намечено определить по световым сигналам системы.
3. Установить на приборе КППМ против треугольного индекса значение ЗМПУ.
4. Переключатель КППМ поставить в положение «Свод».
5. Пройти ИПМ с расчетным МК или с МК = ЗМПУ и определить по КППМ и ППДА, где находится ЛЗП по отношению к самолету.
6. Используя показания КППМ, вывести самолет на ЛЗП. Вертикальная стрелка КППМ указывает положение ЛЗП по отношению самолета, а стрелка курса по отношению к вертикальной стрелке показывает, под каким углом к ЛЗП направлена продольная ось самолета (угол подхода к ЛЗП).
Для полета по ЛЗП пилот обязан подобрать такой курс, при котором вертикальная стрелка находилась бы в центре шкалы прибора.
При наличии уклонения самолета от ЛЗП пилот обязан выйти на линию пути. Для выхода на линию пути самолет разворачивают в сторону вертикальной стрелки КППМ и приводят кружок стрелки курса к верхнему обрезу вертикальной стрелки. Такое положение кружка стрелки курса обеспечивает непрерывное уменьшение угла подхода к ЛЗП и плавный выход на линию пути.
Совместное использование стрелок КППМ обеспечивает простоту вывода самолета на ЛЗП и высокую точность выхода. При значительном уклонении самолета от ЛЗП до начала движения вертикальной стрелки от края шкалы к центру стрелку курса рекомендуется устанавливать перпендикулярно к вертикальной стрелке, что обеспечит более быстрый выход на ЛЗП. Для обеспечения плавного вывода самолета на заданное направление схема нуль-вождения КППМ имеет цепи ограничения, которые обеспечивают уменьшение угловой чувствительности вертикальной стрелки КППМ с увеличением сигнала рассогласования. Для того чтобы отклонение стрелки КППМ было пропорционально не угловому, а линейному отклонению самолета от заданного направления, в системе предусмотрена автоматическая регулировка чувствительности отклоняющей системы КППМ. Это обеспечивается введением в электрическую цепь КППМ функционального потенциометра, ось которого изменяет свое положение в зависимости от дальности до маяка. Линейная чувствительность схемы отрегулирована таким образом, что она практически не зависит от дальности. Схема нуль-вождения выполнена так, что при уклонении самолета от заданного направления в ней возникает напряжение рассогласования, которое преобразуется в напряжение постоянного тока и отклоняет вертикальную стрелку КППМ и тем самым указывает пилоту на необходимость маневра, обеспечивающего возврат самолета на заданное направление полета.
7. Осуществлять полет по ЛЗП, удерживая вертикальную стрелку КППМ в центре шкалы прибора. Стрелка курса при нахождении вертикальной стрелки в центре шкалы прибора устанавливается на подобранный курс следования с учетом угла сноса. При отсутствии сноса она будет показывать курс, равный путевому углу. При наличии сноса стрелка будет показывать курс, отличающийся от путевого угла на величину угла сноса. Для удобства пилотирования самолета необходимо на КППМ ручкой подвести подобранный курс против треугольного индекса.
8. Периодически уточнять курс следования с таким расчетом, чтобы он обеспечивал положение вертикальной стрелки КППМ в центре шкалы прибора.
9. Осуществлять контроль пути по направлению и дальности по показаниям ППДА.
Основным методом контроля пути по направлению при пилотировании самолета с помощью КППМ является сопоставление отсчитанного на ППДА азимута с ЗИПУ. Если азимут, отсчитанный на ППДА, соответствует ЗИПУ, то полет выполняется по ЛЗП. При уклонении самолета вправо азимут будет больше ЗИПУ, а при уклонении влево — меньше.
Контроль пути по дальности осуществляется путем наблюдения за текущей дальностью на ППДА с последующим расчетом путевой скорости и времени пролета контрольных точек маршрута.
10. Определить момент пролета контрольной точки по световым сигналам системы.
При полете от маяка РСБН-2 обеспечивает выдачу световых сигналов о подходе к заданной точке и ее пролете. Предупреждение о подлете к заданной точке и сигнализация о ее пролете осуществляются только в случае, если на щитке управления штурмана на селекторах азимута и орбиты установлены координаты заданной точки и самолет в ходе полета пройдет контрольную точку.
Когда самолет приближается к зоне заданного пункта на расстояние, равное 1—2 мин полета (радиус, зоны предупреждения регулируется на заводе), и входит в так называемую зону предупреждения, происходит включение зеленой лампы «Подлет к зоне». В момент пролета контрольной точки происходит автоматическое включение красной лампы «Пролет зоны». Она включается, когда фактические координаты, измеренные системой, соответствуют установленным на щитке управлений или отличаются от них не более чем на 1,1° по азимуту и на 1,1 км по дальности.
Лампы «Подход к зоне» и «Пролет зоны» устанавливаются на приборных досках пилота и штурмана. Начиная с момента входа в зону предупреждения, пилот обязан более внимательно осуществлять пилотирование самолета, так как сигнальная лампа «Пролет зоны» включается, если курсовая стрелка КППМ находится в пределах черного кружка.
После пролета пункта гаснет красная лампа, а после выхода самолета из зоны предупреждения гаснет и зеленая лампочка.
Если самолет не пройдет точно над контрольной точкой, координаты которой установлены на щитке управления штурмана, то после предупредительного зеленого сигнала красная лампочка не загорается. При установке на щитке управления штурмана координат поворотного пункта маршрута для обеспечения выхода на ЛЗП следующего участка необходимо учитывать линейное упреждение разворота (ЛУР), т. е. при установке дальности ППМ необходимо уменьшить фактическую дальность на величину ЛУР. В этом случае в момент загорания красной лампы самолет будет находиться над точкой начала разворота.
11. Контролировать периодически исправность работы аппаратуры. Работа азимутального канала контролируется по бленкеру и сигнальной лампочке, а канала дальности — по сигнальной лампочке.
Выполнение полета на радиомаяк. Полет на радиомаяк может быть выполнен, если ЛЗП совпадает с направлением на радиомаяк, а дальность до него обеспечивает устойчивый обмен сигналами между самолетом и наземным маяком.
При полете на радиомаяк порядок работы с самолетным оборудованием такой же, как и при полете от радиомаяка. Исключение представляет положение некоторых переключателей, а именно:
1. Переключатель рода работ на щитке управления штурмана устанавливают в положение «Азимут на». При этом происходит изменение полярности включения вертикальной стрелки КППМ.
2. Ручкой «Азимут» устанавливают значение заданного азимута А=ЗИПУ± 180° (рис. 5).
Методика выполнения полета на радиомаяк аналогична методике выполнения полета от радиомаяка.
Войдя в зону действия радиомаяка экипаж, определяет по вертикальной стрелке КППМ и по значению азимута на ППДА положение самолета относительно ЛЗП.
Выход на ЛЗП осуществляется по показаниям КППМ. Пилот непрерывно удерживает в совмещенном положении стрелку курса с верхним обрезом вертикальной стрелки КППМ. Такое совмещение стрелок в процессе выхода обеспечивает одновременный разворот самолета с приближением его к ЛЗП по плавной кривой.
Полет по ЛЗП осуществляется с помощью КППМ, показания которого при полете на радиомаяк остаются такими же, как и при полете от радиомаяка, т. е. вертикальная стрелка указывает где находится ЛЗП относительно самолета. Если вертикальная стрелка КППМ удерживается в центре черного кружка, то полет происходит по ЛЗП.
Контроль пути по направлению при полете на радиомаяк осуществляется по показаниям КППМ и ППДА. Сравнение показаний ППДА с заданным азимутом является основным методом контроля пути по направлению. Если фактический азимут, отсчитанный на ППДА, соответствует заданному, то самолет находится на ЛЗП; если фактический азимут больше или меньше заданного, то самолет находится соответственно слева или справа от ЛЗП (см. рис. 5).
Контроль пути по дальности ведется путем наблюдения за текущей дальностью, непрерывно указываемой счетчиком ППДА.
Момент пролета ППМ (КО), как и при полете от радиомаяка, определяется по световой сигнализации. Для этого на щитке управления штурмана на селекторах азимута и орбиты должны быть установлены координаты того пункта, момент пролета которого необходимо определить по световым сигналам системы.
Выполнение полета по орбите. Полетом по орбите называется полет по окружности с заданным радиусом, центром которой является радиомаяк. Такой полет может быть применен в том случае, когда линия заданного пути совпадает с окружностью. Например, если два ППМ находятся в зоне действия системы и расположены на одинаковом расстоянии от радиомаяка, то полет между этими пунктами можно выполнить по орбите.
При полетах по трассам режим «Орбита» практически не применяется. Однако в некоторых случаях при внетрассовых полетах, а также при выполнении полетов по специальному применению этот род работы может быть с успехом использован.
Для выполнения полета по орбите необходимо:
1. Установить на щитке управления штурмана:
а) канал работы наземного радиомаяка;
б) переключатель рода работы в положение «Орбита левая» или «Орбита правая». Левой считается орбита, при полете по которой радиомаяк находится слева от самолета; если радиомаяк оправа от самолета, то орбита будет правая;
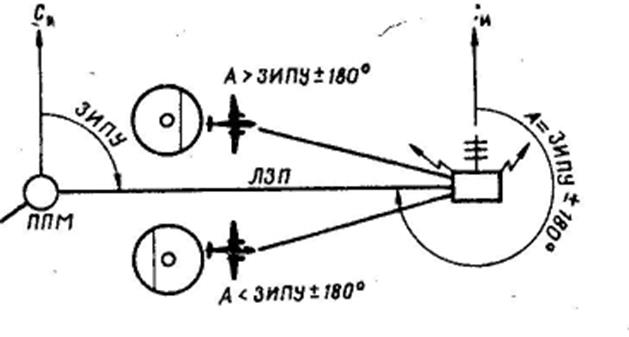
Рис. 5. Определение места самолета
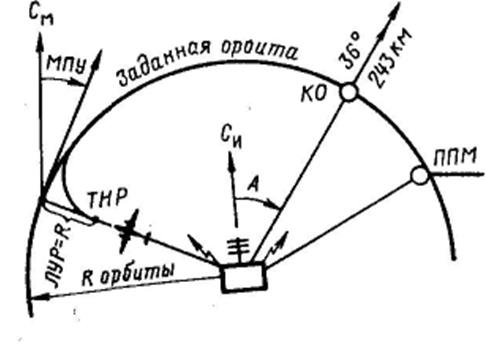
Рис. 6. Определение места самолета
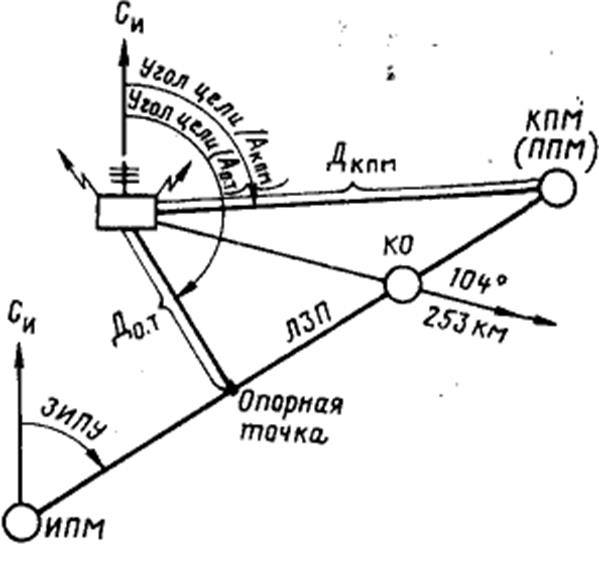
Рис. 7. Определение места самолета
в) ручкой «Орбита» радиус заданной орбиты; г) ручкой «Азимут» азимут первого контрольного ориентира или ППМ (КПМ).
2. Переключатель КППМ поставить в положение «Свод».
3. Установить на КППМ значение МПУ, соответствующее направлению орбиты в точке выхода на нее самолета (рис. 6).
4. Выйти к точке начала разворота и развернуть самолет на курс, равный примерно МПУ для точки выхода на орбиту. Для обеспечения плавного выхода на заданную орбиту этот разворот начинают с учетом линейного упреждения разворота. При полете к заданной орбите по азимуту величина ЛУР равна радиусу разворота самолета.
5. Пользуясь КППМ, вывести самолет на заданную орбиту. Отклонение вертикальной стрелки КППМ при полете по орбите остается таким же, как и при полете по азимуту, т. е. она указывает, куда нужно развернуть самолет, чтобы выйти на ЛЗП. Вывод самолета на заданную орбиту осуществляется путем совместного использования стрелки курса и вертикальной стрелки КППМ.
6. Выполнять полет по орбите, удерживая вертикальную стрелку в пределах черного кружка шкалы КППМ.
При полете по орбите путевой угол непрерывно меняется, поэтому пользоваться магнитным компасом в этом случае невозможно. Удержание самолета на заданной орбите достигается путем сохранения подобранного крена с плавным изменением курса.
7. Осуществлять контроль пути по направлению и дальности. Контроль пути по направлению ведется наблюдением за положением вертикальной стрелки КППМ и значением текущей дальности на ППДА, которое должно быть равно дальности до заданной орбиты.
Контроль пути по дальности ведется наблюдением за текущим значением азимута и сравнением его с азимутом контрольных точек, а также с помощью световой сигнализации (по загоранию лампочек подлета и пролета заданной точки). Для обеспечения контроля пути по дальности в период подготовки к полету для намеченных ориентиров определяют азимуты, которые записывают на карте и заносят в специальный бланк. В полете текущие значения А сравнивают с расчетным А контрольного ориентира.
Из вышеизложенного следует, что основной задачей экипажа при полете по орбите является сохранение на протяжении всего полета заданной дальности от наземного радиомаяка до самолета. Эта задача решается автоматически, если вертикальную стрелку КППМ непрерывно удерживать в центре шкалы.
Дата добавления: 2019-02-08; просмотров: 1124;
Поиск по сайту
Узнать еще
- Анализ режимов цепей постоянного тока с применением закона Ома
- Аналитические процедуры, их применение в аудите.
- В мировой практике для получения гидрированных жиров нашел применение селективный катализатор
- В) широкое применение женского и детского труда.
- Важнейшие представители и их применение
- Векторный магнитный потенциал. Векторное уравнение Пуассона. Применение для вычисления магнитных потоков
- Вероятностный анализ работоспособности портовых портальных кранов с применением сетей уверенностей
- Виды и применение органических вяжущих

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
