ВЫПОЛНЕНИЕ ПОЛЕТА ПАРАЛЛЕЛЬНО ЛЗП
Полет параллельно ЛЗП на заданном удалении от нее может выполняться по указанию службы движения или в случае возникшей для экипажа необходимости. Обычно такие полеты приходится производить на участках набора высоты или снижения, когда встречные самолеты разводятся по боковому интервалу, а также на участках обхода грозы.
В режиме «СРП» для выполнения полета параллельно ЛЗП в случае, если за «цель» принята опорная точка, необходимо уменьшить или увеличить на БУ СРП расстояние до опорной точки на заданное удаление полета от ЛЗП и пилотировать самолет так, чтобы вертикальная стрелка КППМ находилась в центре шкалы прибора.
Если за «цель» был принят КПМ (ППМ), то необходимо перейти на пользование опорной точкой, для чего на БУ СРП установить азимут («угол цели») опорной точки, равный ЗИПУ±90°, а также дальность опорной точки («расстояние до цели»), которую необходимо увеличить или уменьшить на заданное удаление полета от ЛЗП и затем продолжать полет по КППМ в обычном порядке.
Если полет выполняется от радиомаяка или на радиомаяк, то для полета параллельно ЛЗП необходимо:
1. Перейти на режим работы «СРП» и принять за «цель» опорную точку.
2. Установить на БУ СРП величину ЗИПУ данного участка маршрута.
3. Установить на БУ СРП «угол цели», равный ЗИПУ±90°. Знак плюс берется, когда необходимо полет выполнять правее ЛЗП, а знак минус — левее (рис. 8).
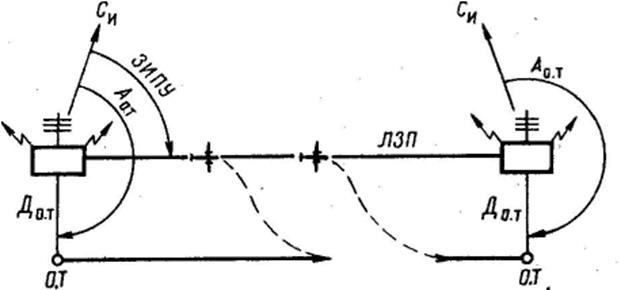
Рис. 8. Полет паралельно ЛЗП
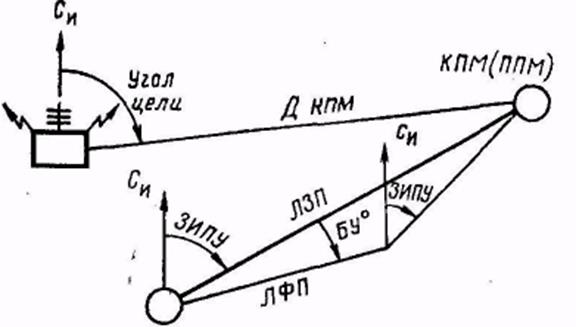
Рис. 9. Вывод самолета в КПМ при уклонении ОТ ЛЗП
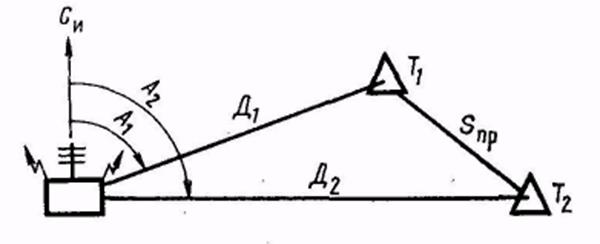
Рис. 10. Определение путевой скорости
4. Установить на БУ СРП «Расстояние до цели», равное заданному удалению полета от ЛЗП.
5. Выполнять полет параллельно ЛЗП, используя КППМ.
Вывод самолета в КПМ при уклонении от ЛЗП. В случае преднамеренного или получившегося уклонения самолета от ЛЗП и необходимости выполнения полета в КПМ (ППМ) или на КО самолет на указанные пункты выводится с помощью КППМ (рис. 9).
Для вывода самолета в КПМ в режиме «СРП» необходимо:
1. Установить на БУСРП координаты точки выхода («Расстояние» и «Угол цели»).
2. Вращением ручки «ЗПУ» на БУ СРП привести вертикальную стрелку КППМ в центр шкалы, после чего отсчитать на шкале селектора новое значение ЗИПУ для вывода самолета в заданную точку. Перевести ЗИПУ в ЗМПУ.
3. Установить на КППМ против треугольного индекса значение полученного ЗМПУ и развернуть самолет на МК = ЗМПУ.
4. Выполнять полет по КППМ, удерживая вертикальную стрелку в центре шкалы прибора.
5. Определить момент выхода самолета на КПМ по световым сигналам системы.
Дата добавления: 2019-02-08; просмотров: 1257;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
