Уравнения движения электропривода
Наиболее удобным методом составления уравнений движения механической части привода являются уравнения Лагранжа второго рода. При этом предполагается, что движение механической части исследуется в системе обобщенных координат, в качестве которых должны быть приняты независимые параметры, определяющие положения механизма. Такими параметрами являются углы поворота вращающихся вокруг неподвижных осей дискретных инерционных элементов qt и их линейные перемещения Si (рис. 2.11).
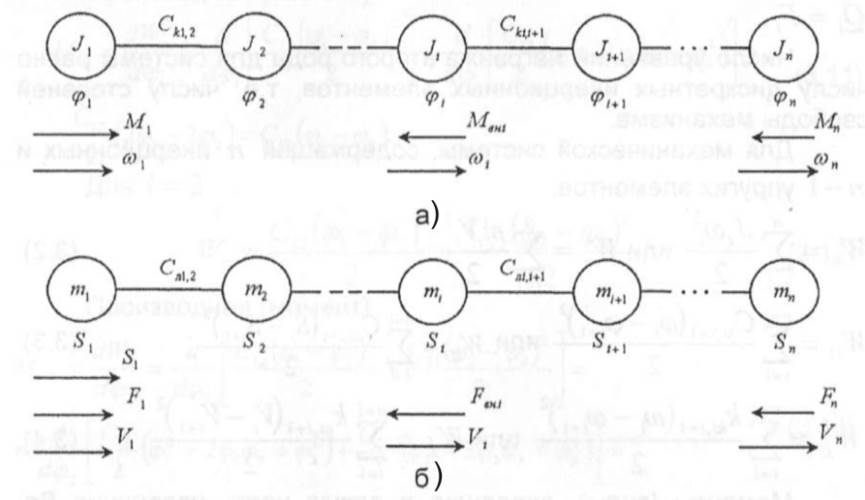 Рис. 2.11 Расчетные схемы механической части:
а - для вращающихся элементов; б - для поступательно движущихся элементов
Рис. 2.11 Расчетные схемы механической части:
а - для вращающихся элементов; б - для поступательно движущихся элементов
|
Уравнение Лагранжа второго рода
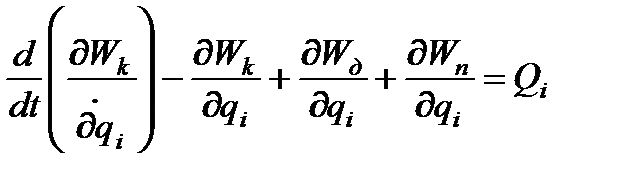 , (2.28)
, (2.28)
где  - кинетическая энергия системы ;
- кинетическая энергия системы ;
 - потенциальная энергия системы;
- потенциальная энергия системы;
 –работа сил рассеяния (диссипативная функция Релея);
–работа сил рассеяния (диссипативная функция Релея);
 - обобщенная координата;
- обобщенная координата;
 - обобщённая скорость;
- обобщённая скорость;
 - обобщённая внешняя сила, соответствующая обобщённой координате.
- обобщённая внешняя сила, соответствующая обобщённой координате.
При вращательном движении  ,
,  ;
;
 ;
;
при поступательном движении  ,
,  ,
,
 .
.
Число уравнений Лагранжа второго рода для системы равно числу дискретных инерционных элементов, т.е. числу степеней свободы механизма.
Для механической системы, содержащей n инерционных и n  1 упругих элементов:
1 упругих элементов:
 или
или  ; (2.29)
; (2.29)
 или
или  ; (2.30)
; (2.30)
 или
или  . (2.31)
. (2.31)
Моменты (силы), входящие в левую часть уравнения Лагранжа (2.28) и действующие на 1-й инерционный элемент системы, определяются как
1)инерционные
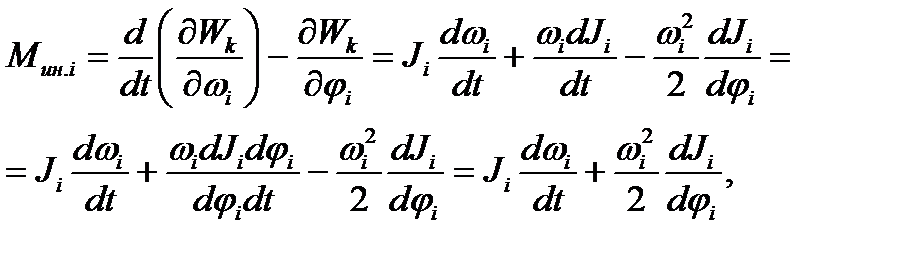 (2.32)
(2.32)
где  =
=  ;
;
2)потенциальные
 ; (2.33)
; (2.33)
 ; (2.34)
; (2.34)
3) диссипативные
 ; (2.35)
; (2.35)
 . (2.36)
. (2.36)
Для  =1 (для первой массы)
=1 (для первой массы)
 . (2.37)
. (2.37)
Производная (момент)
Для  =2
=2
 . (2.39)
. (2.39)
Производная (момент)
В соответствии с уравнением Лагранжа (2.28) для любого  - гo звена может быть записано уравнение движения
- гo звена может быть записано уравнение движения
 ; (2.41)
; (2.41)
 , (2.42)
, (2.42)
где  ,
,  - суммарный внешний момент (сила), действующий на
- суммарный внешний момент (сила), действующий на  -ое звено.
-ое звено.
В тех случаях, когда момент инерции (масса) звена не зависит от его положения,  =0
=0  , получим
, получим
 ; (2.43)
; (2.43)
 =
=  , (2.44)
, (2.44)
где  ,
,  – угловое и линейное ускорение.
– угловое и линейное ускорение.
Диссипативные силы в упругих связях, обусловленные силами вязкого трения, существенно меньше потенциальных сил, в связи с чем при исследовании законов движения электроприводов механизмов в первом приближении их можно не учитывать.
С учетом указанных допущений уравнения движения в случае трехмассовой системы имеют следующий вид
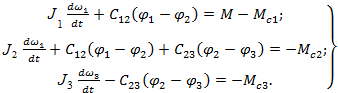 (2.45)
(2.45)
Для двухмассовой системы
 (2.46)
(2.46)
С учётом, что момент упругой связи  , уравнения 2.46 запишутся в следующем виде
, уравнения 2.46 запишутся в следующем виде
 (2.47)
(2.47)
Для одномассовой абсолютно жесткой системы на основании (2.32) при J = var можно записать уравнение движения
 , (2.48)
, (2.48)
а при  = const
= const
 . (2.49)
. (2.49)
Дата добавления: 2019-02-08; просмотров: 1056;
Поиск по сайту
Узнать еще
- II. Ситуационные (нестандартные) движения
- А. Уравнения движения точки в декартовых координатах
- А.4 Общее уравнение движения мобота.
- Автономные системы, символические уравнения Вопрос 2
- Активизация демократического движения
- Алгебраические и трансцендентные уравнения
- Алгоритм моделирования системы электропривода по методу структурных схем
- Алгоритм моделирования системы электропривода по методу уравнений состояния

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
