Механические переходные процессы электропривода
Переходные процессы в электроприводе возникают при переходе из одного установившегося состояния к другому, когда изменяются скорость, момент, ток двигателя. Внешней причиной возникновения этих процессов являются управляющие и возмущающие воздействия: изменения питающего напряжения, его частоты, нагрузки на валу, момента инерции, магнитного потока, сопротивлений в цепях двигателей и т.д.
Реакция привода на возмущающее или управляющее воздействия составляет суть переходных процессов. Внутренней причиной, обусловливающей переходные процессы, являются инерционности электропривода - механическая и электромагнитная.
Изменение запаса кинетической энергии  и электромагнитной энергии
и электромагнитной энергии  в элементах его электрических цепей происходит во времени, что объясняет возникновение переходных процессов даже при скачкообразном изменении управляющих и возмущающих воздействий.
в элементах его электрических цепей происходит во времени, что объясняет возникновение переходных процессов даже при скачкообразном изменении управляющих и возмущающих воздействий.
В качестве простейших примеров рассмотрим ряд переходных процессов в механической части электропривода, представленной жёстким механическим звеном ( см. рис. 2.10, в).
Переходные процессы при М = const, Мс = const, J = const
В соответствии с уравнением движения электропривода
в механической части электропривода действуют два момента: электромагнитный момент двигателя М и момент статических сопротивлений Мс, приведенный к валу двигателя. Результатом их взаимодействия является динамический момент
 .
.
Для определенности математического описания движения электропривода одно из двух возможных направлений вращения двигателя принимается за положительное. Тогда, если на рассматриваемом интервале времени направления момента и скорости двигателя совпадают, т.е. момент и скорость имеют одинаковые знаки, то работа совершается за счет двигателя (двигательный режим). В противном случае, когда знаки момента и скорости различны, двигатель потребляет механическую энергию с вала (тормозной режим). Таким образом, в уравнении движения электропривода перед М может стоять знак «+» или «-» .
Момент статистических сопротивлений имеет разную природу: реактивные моменты всегда противодействуют движению, активные моменты могут препятствовать или способствовать движению, т.е. перед Мс может стоять знак «-» или «+». Тогда уравнение движения электропривода одномассовой системы с учетом знаков моментов может быть записано в виде
 . (2.50)
. (2.50)
Знак и величина динамического момента являются результатом взаимодействий М и Мс. В связи с чем , различают следующие режимы работы электропривода
1) Мдин > 0, т. е. 
 , что соответствует разгону двигателя при
, что соответствует разгону двигателя при  > 0 и торможению двигателя при
> 0 и торможению двигателя при  < 0;
< 0;
2) Мдин <0, т.е.  , что соответствует торможению при
, что соответствует торможению при  >0 и разгону при
>0 и разгону при  <0;
<0;
3) Мдин = 0, т.е. =0, что соответствует установившемуся режиму при  =const.
=const.
На рис. 2.12 приводятся зависимости  ,
,  ,
,  ,
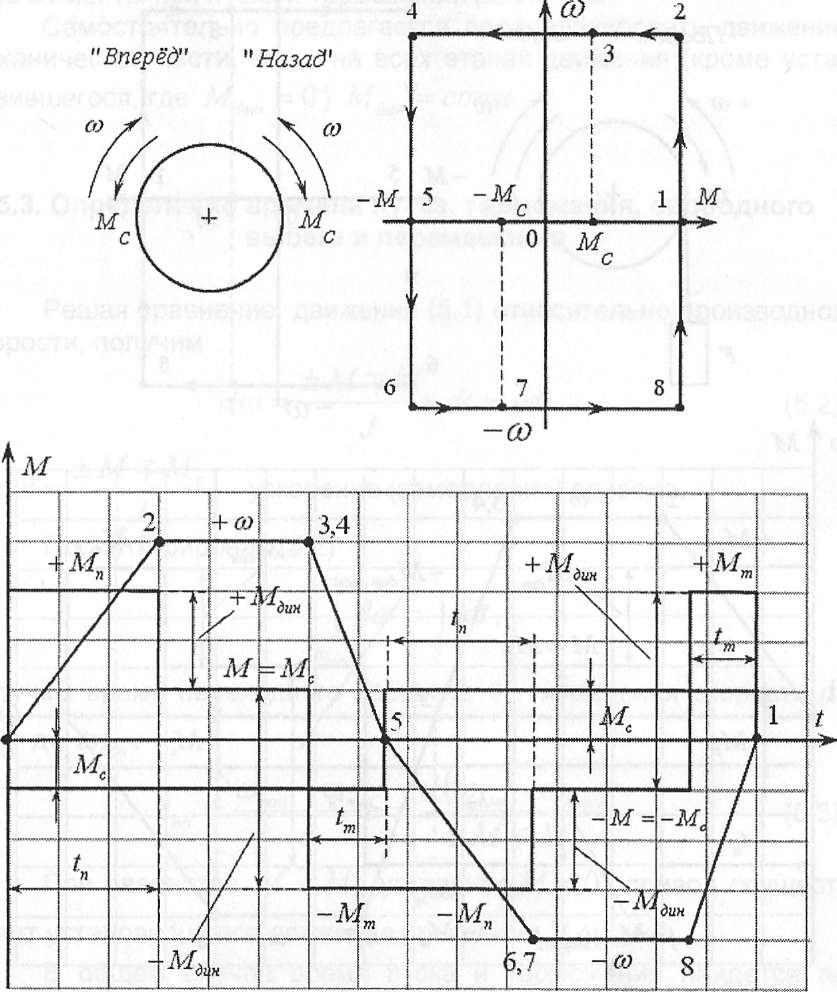
,  на различных этапах движения механическойчасти электропривода:при реактивном Мс (рис. 2.12, а) и активном Мс (рис. 2.12,б), Мn =Мm .
на различных этапах движения механическойчасти электропривода:при реактивном Мс (рис. 2.12, а) и активном Мс (рис. 2.12,б), Мn =Мm .
Как видно из приведенных графиков, на всех этапах переходных процессов Мn =Мm, Мс = const, тогда как динамические моменты при пуске и торможении различны. Самостоятельно предлагается проанализировать движение механической части, когда на всех этапах движения (кроме установившегося, где Мдин = 0) Мдин = const.
Определение времени пуска, торможения, свободного выбега и перемещения
Решая уравнение движения (2.50) относительно производной скорости, получим
 , (2.51)
, (2.51)
где  - ускорение (замедление) привода.
- ускорение (замедление) привода.
Проинтегрировав (2.51)
получим время переходного процесса  изменения скорости от
изменения скорости от  до
до 
 . (2.52)
. (2.52)
|
Рис. 2.12,а. Схема движения, идеализированные механические характеристики  = f(М) и кривые М = f(t),
= f(М) и кривые М = f(t),  = f(t)
= f(t)
при реактивном моменте статического сопротивления Мс
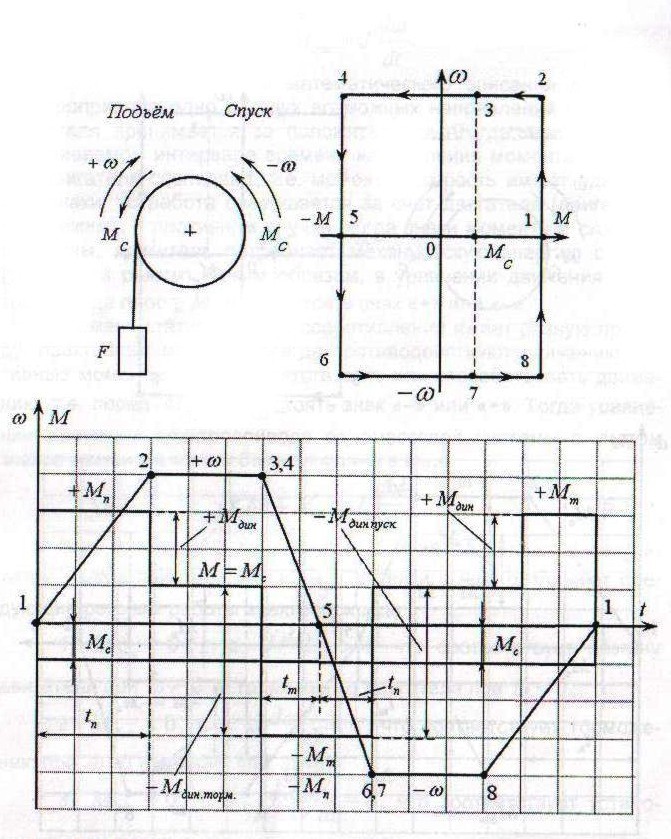 Рис. 2.12,б. Схема движения, идеализированные механические характеристики = f(М) и кривые М = f(t),
Рис. 2.12,б. Схема движения, идеализированные механические характеристики = f(М) и кривые М = f(t),  = f(t)
= f(t)
при активном моменте статического сопротивления Мс
При равенстве  ускорение
ускорение  = 0 , привод осуществляет установившееся движение при
= 0 , привод осуществляет установившееся движение при  (
(  ).
).
В общем случае время пуска и торможения найдётся по уравнению
 . (2.53)
. (2.53)
Величина динамического момента  определяет время переходных процессов при пуске и торможении. Следует отметить, что при реактивном
определяет время переходных процессов при пуске и торможении. Следует отметить, что при реактивном 
 при
при  ,
,
а при активном моменте 
 при
при  ,
,
тогда как в режиме пуска на опускание груза и в режиме торможения при подъёме груза
 при .
при .
Следует отметить, что если, например, задан количественно пусковой  и
и  , то время пуска
, то время пуска
 , (2.54)
, (2.54)
т.е. при заданной пусковой мощности время пуска будет определяться двойным запасом кинетической энергии привода
 . (2.55)
. (2.55)
В связи с этим с целью экономии электрической энергии, потребляемой из сети, и потерь энергии в электроприводе нужно проектировать электропривод с минимальным запасом кинетической энергии.
В режимах торможения с целью уменьшения потерь энергии в приводе оно должно осуществляться с нагрузкой. Тогда
 ; (2.56)
; (2.56)
 , (2.57)
, (2.57)
т.е. пропорционально запасу кинетической энергии при тормозной мощности равной пусковой.
Время свободного выбега привода при 
 , (2.58)
, (2.58)
т.е. практически при заданной мощности холостого хода определяется двойным запасом кинетической энергии привода и является относительно большим.
Угол поворота вала двигателя за время пуска, торможения
 . (2.59)
. (2.59)
При равноускоренном (замедленном) движении
 , (2.60)
, (2.60)
где  - ускорение (замедление).
- ускорение (замедление).
Тогда
 . (2.61)
. (2.61)
При движении с установившейся скоростью 
 . (2.62)
. (2.62)
На рис. 2.13 представлены тахограмма  = f(t) и изменение угла поворота
= f(t) и изменение угла поворота  за цикл работы механизма.
за цикл работы механизма.
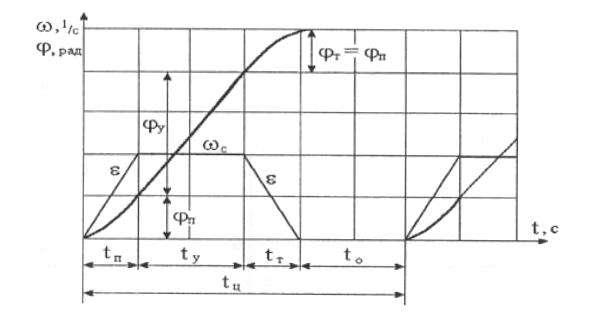 Рис. 2.13. К расчёту угла поворота вала двигателя
Рис. 2.13. К расчёту угла поворота вала двигателя
|
Дата добавления: 2019-02-08; просмотров: 2612;
Поиск по сайту
Узнать еще
- II. Механические передачи
- RedOX процессы. Редоксиметрия
- V. Политропные процессы
- V. РЕЧЬ И РЕЧЕВЫЕ ПРОЦЕССЫ
- VIII.3. Антропогенные воздействия на неблагоприятные экзогенные процессы
- А. Механические методы
- Активно-возбудимые среды. Автоволновые процессы в сердечной мышце
- Алгоритм моделирования системы электропривода по методу структурных схем

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
