А.4 Общее уравнение движения мобота.
Рассмотрим общий случай движения машины на подъёме с некоторым ускорением  и сопротивлением кабеля (рис. Р5).
и сопротивлением кабеля (рис. Р5).
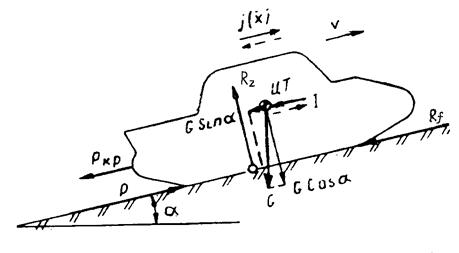
Рис. Р5. Схема сил, действующих на машину при её ускоренном движении на подъёме.
Допустим, что сила Pкр действует параллельно поверхности пути и сопротивление воздуха равно нулю. Спроецируем все внешние силы, действующие на мобот, на продольную ось, параллельную поверхности пути, и на нормаль к этой поверхности (мобот рассматриваем, как сплошное твёрдое тело):
 ;
;
 ,
,
где m - масса машины.
Так как R=f×RZ=f×G×cosa, то
 . ( 11 )
. ( 11 )
Сумма в скобках обозначается, через f0 и называется коэффициентом суммарного сопротивления движению
 . ( 12 )
. ( 12 )
Уравнение (11) можно записать в виде
 , ( 13 )
, ( 13 )
откуда получим
 . ( 14 )
. ( 14 )
Выражение (14) называется дифференциальным уравнением движения центра тяжести мобота.
При малых углах подъёма (a=2°...4°) принимают cosa=1, sina=tga=i, где i - относительный подъём. В этом случае имеем
f0=f+i .
Уравнение равномерного прямолинейного движения мобота получим, если в формуле (13) ускорение машины  приравняем нулю:
приравняем нулю:
 .
.
Если нет питающего кабеля, то

 . ( 15 )
. ( 15 )
Рост угла подъёма a всегда вызывает увеличение общего коэффициента сопротивления движению. При движении на уклоне коэффициент f0 может быть отрицательным, тогда для сохранения равномерного движения необходимо приложить отрицательную силу тяги и силу торможения.
Для горизонтального участка пути
P=f×G .
Как видно из полученных уравнений движение шасси определяется внешними условиями (a,f,Pкр) и параметрами мобота (G). Величина Р является потребной силой тяги, которую необходимо обеспечить двигателем.
Дата добавления: 2020-04-12; просмотров: 1261;
Поиск по сайту
Узнать еще
- II. Общее понятие о процессе познания и процессе обучения.
- II. Ситуационные (нестандартные) движения
- А. Уравнения движения точки в декартовых координатах
- Автоматическая система, описываемая характеристическим уравнением
- Активизация демократического движения
- Алгоритм решения прямой задачи динамики при установившемся режиме движения машины.
- Амплитуда рассеянной волны решеткой точечных атомов. Уравнение дифракции Лауэ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
