Расчётные схемы механической части электропривода
Кинематические схемы электроприводов дают представление об идеальных связях между движущимися массами конкретной установки ( см. рис. 2.2-2.8), отражают передачу электромагнитной мощности (момента) от двигателя к рабочему органу механизма. Однако они не отражает того, что:
1. Все элементы при нагружении деформируются, т.е. обладают конечной жесткостью.
2. В общем случае инерционные массы системы движутся с различными скоростями.
3. В элементах механической части имеются зазоры.
Поэтому для анализа условий движения механической части
привода необходимо с помощью кинематической схемы составить расчетную механическую схему, в которой моменты инерции и моменты нагрузки вращающихся элементов, массы и действующие силы поступательно движущихся элементов, зазоры, а также реальные жесткости механических связей заменены эквивалентными величинами, приведёнными к одной и той же расчетной скорости. Обычно приведение схемы осуществляется к угловой скорости двигателя, но возможно к любой скорости.
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии.
При приведении необходимо обеспечить сохранение потенциальной и кинетической энергии системы, а также элементарной работы всех действующих в системе сил и моментов на всех возможных перемещениях.
Переход к расчетной схеме механической части электропривода рассмотрим на примере кинематической схемы электропривода, приведённой на рис. 2.9, в движении которой присутствуют N вращающихся элементов и К поступательно движущихся масс.
В рассматриваемой кинематической схеме двигатель Д через соединительную муфту СМ1, ряд зубчатых передач ЗП1...ЗПi и соединительную муфту СМ2 приводит во вращение барабан Б, который преобразует вращательное движение в поступательное перемещение ряда связанных масс. В данной схеме рабочим органом является грузозахватное устройство, перемещающее груз с массой  . Груз движется со скоростью Vгр и имеет силу тяжести F = FK. Каждый вращательно движущийся элемент обладает моментом инерции
. Груз движется со скоростью Vгр и имеет силу тяжести F = FK. Каждый вращательно движущийся элемент обладает моментом инерции  и связан с (i +1) -м элементом механической связью, обладающей жесткостью
и связан с (i +1) -м элементом механической связью, обладающей жесткостью  .
.
. 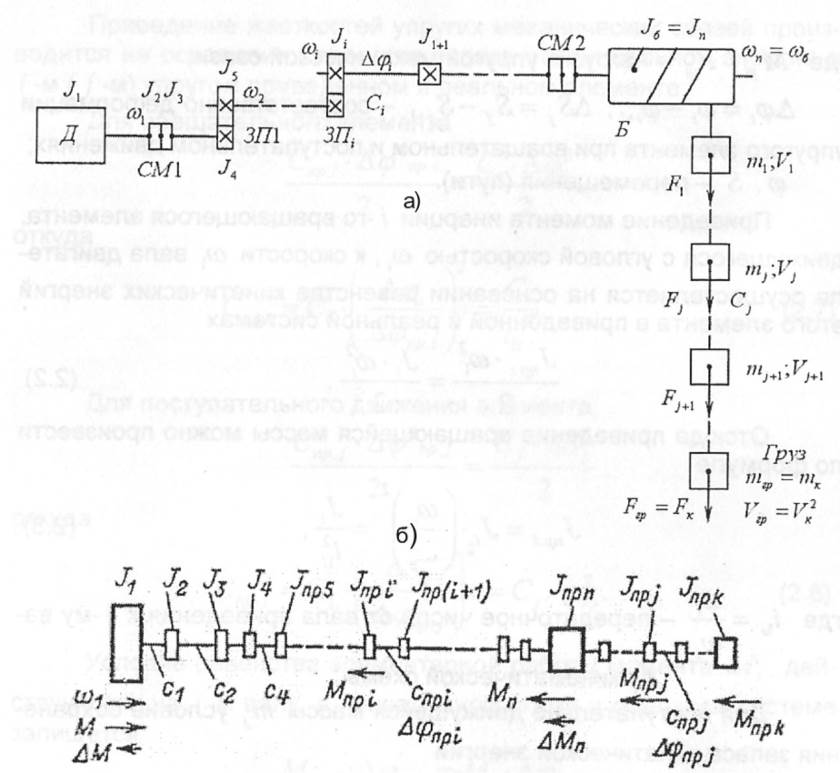 Рис. 2.9. Кинематическая (а) и расчетная (б) схемы механической части электропривода подъёма
Рис. 2.9. Кинематическая (а) и расчетная (б) схемы механической части электропривода подъёма
|
Соответственно каждый поступательно движущийся элемент имеет массу  и связан с (j+1)-м элементом механической связью с жесткостью
и связан с (j+1)-м элементом механической связью с жесткостью  . Для механических связей, деформация которых подчиняется закону Гука, их жесткости можно определить по формулам:
. Для механических связей, деформация которых подчиняется закону Гука, их жесткости можно определить по формулам:
 ,
,  (2.6)
(2.6)
где  – нагрузка упругой механической связи;
– нагрузка упругой механической связи;
 и
и  - соответственно деформации упругого элемента при вращательном и поступательном движениях;
- соответственно деформации упругого элемента при вращательном и поступательном движениях;
 ,
,  - перемещение (путь).
- перемещение (путь).
Приведение момента инерции  - го вращающегося элемента, движущегося с угловой скоростью
- го вращающегося элемента, движущегося с угловой скоростью  , к скорости
, к скорости  вала двигателя осуществляется на основании равенства кинетических энергий этого элемента в приведённой и реальной системах
вала двигателя осуществляется на основании равенства кинетических энергий этого элемента в приведённой и реальной системах
 . (2.7)
. (2.7)
Отсюда приведение вращающейся массы можно произвести по формуле
 , (2.8)
, (2.8)
где  – передаточное число от вала приведения к
– передаточное число от вала приведения к  -му валу кинематической схемы.
-му валу кинематической схемы.
Для поступательно движущейся массы  условие сохранения запаса кинетической энергии
условие сохранения запаса кинетической энергии
 ; (2.9)
; (2.9)
Откуда
(2.10)
где 
 – радиус приведения j-го поступательно движущегося элемента к скорости приведения
– радиус приведения j-го поступательно движущегося элемента к скорости приведения  .
.
Приведение вращательных  и поступательных перемещений
и поступательных перемещений  к угловой скорости
к угловой скорости  осуществляется по формулам
осуществляется по формулам
 ;
;  . (2.11)
. (2.11)
Приведение жёсткостей упругих механических связей производится на основании равенства запаса потенциальной энергии в -ом (j-ом) упругом приведённом и реальном элементах:
для вращательного элемента
 , (2.12)
, (2.12)
откуда
 , (2.13)
, (2.13)
для поступательного движущегося элемента
 ,
,
откуда
 . (2.14)
. (2.14)
Условие равенства элементарной работы момента  , действующего на
, действующего на  - ом валу, в приведённой схеме и реальной системе запишется
- ом валу, в приведённой схеме и реальной системе запишется
 ,
,
откуда
 . (2.15)
. (2.15)
Аналогично для силы  , приложенной к j-ому поступательно движущемуся элементу
, приложенной к j-ому поступательно движущемуся элементу
 ,
,
откуда
 . (2.16)
. (2.16)
Полученные формулы приведения позволяют при известных параметрах элементов кинематической схемы сделать переход к расчетной приведённой системе. Будем считать заданными силы и моменты, действующие в механической системе (их значение можно рассчитать для конкретных механизмов), а также известными конструктивные размеры и материалы элементов кинематической цепи. Последние данные позволяют с помощью справочной литературы рассчитать их моменты инерций и эквивалентные жесткости.
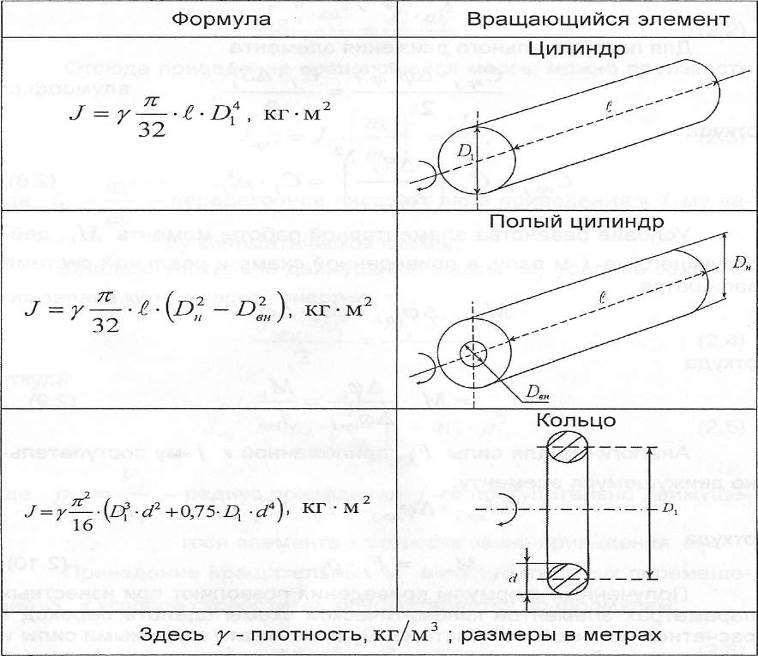
Например, формулы определения моментов инерции некоторых вращающихся тел приведены в табл. 2.1.
Коэффициенты жесткостей для упругих связей (Нм):
стержня при его растяжении и сжатии
 Нм,
Нм,  (2.17)
(2.17)
где  – длина стержня, м;
– длина стержня, м;
S –площадь поперечного сечения ,  ;
;
E – модуль упругости растяжения и сжатия, Па;
вала при его скручивании
 , Нм (2.18)
, Нм (2.18)
где  – длина вала, м;
– длина вала, м;
 - момент инерции поперечного сечения вала,
- момент инерции поперечного сечения вала,  ;
;
R – радиус вала, м; 
G – модуль упругости сечения, Па.
Таблица 2.1 Моменты инерции
|
После приведения к расчетной скорости значений моментов инерций и поступательно движущихся масс, жесткостей, моментов, сил составляется расчетная схема. Для наглядности расчетная схема представляется в виде длинного безинерционного вала, в разных точках которого размещены сосредоточенные массы двигателя  , ведущей
, ведущей  и ведомой
и ведомой  полумуфты, ведущей шестерни
полумуфты, ведущей шестерни  ,
,  …
…  …
…
 , приведённые массы поступательно движущихся элементов
, приведённые массы поступательно движущихся элементов  …
…  (рис. 2.9,б).
(рис. 2.9,б).
Представления о моментах инерций дают размеры соответствующих элементов схемы, изображающих массы, а жесткости  обратно пропорциональны длине соответствующих отрезков валов.
обратно пропорциональны длине соответствующих отрезков валов.
Для кинематической схемы на рис. 2.9,а приведённая расчётная схема имеет вид, показанный на рис. 2.9,б. Необходимо отметить, что расчетная схема электропривода механизма подъёма с учётом упругих механических связей представляет собой достаточно сложную многомассовую систему. Рассматривая эту схему, можно выделить три наиболее значительные массы – ротор двигателя с моментом инерции , барабан с приведённым моментом инерции и груз . Малые инерционные элементы необходимо добавить к близлежащим большим, а затем определить эквивалентные жёсткости связей между полученными связями по формуле
 . (2.19)
. (2.19)
На исходной расчётной схеме стрелками показаны приложенные к отдельным массам системы приведённые моменты действующих внешних моментов (сил) 
 . К ротору двигателя приложен электромагнитный момент M и момент потерь
. К ротору двигателя приложен электромагнитный момент M и момент потерь  .
.
Можно рассмотреть ряд примеров составления схем и показать, что совершенно разнотипные механизмы приводятся к трём типовым расчётным схемам (рис. 2.10):
1. Трёхмассовая упругая система.
2. Двухмассовая упругая система.
3. Обобщённое жесткое приведённое механическое звено.
Трёхмассовая упругая система при рассмотрении электромеханических систем (ЭМС) автоматизированного электропривода используется в редких случаях, когда возникает необходимость более детального анализа условий движения их механической части (рис. 2.10,а).
ЭМС автоматизированного электропривода с двухмассовой упругой механической частью представляет собой основной объект, изучаемый в теории автоматизированного электропривода (рис. 2.10,б).
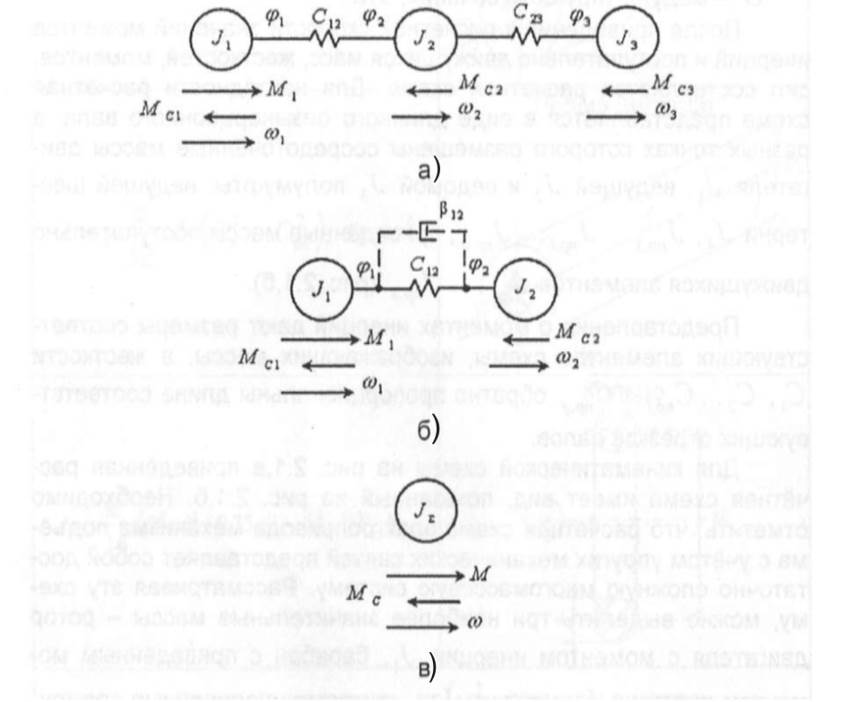 Рис. 2.10. Расчетные схемы механической части электропривода
Рис. 2.10. Расчетные схемы механической части электропривода
|
Обобщенное жесткое приведенное механическое звено электропривода может быть представлено схемой рис. 2.10,в. При использовании этой схемы механические связи получаются абсолютно жесткими и механическая часть представляется эквивалентной массой с моментом инерции  , на которую воздействует электромагнитный момент М и суммарный приведенный к валу двигателя момент сопротивлений Мс, включающий все механические потери в системе, в том числе и механические потери в двигателе.
, на которую воздействует электромагнитный момент М и суммарный приведенный к валу двигателя момент сопротивлений Мс, включающий все механические потери в системе, в том числе и механические потери в двигателе.
В общем случае суммарный момент инерции может быть определен
 , (2.20)
, (2.20)
где n и m – число масс установки, соответственно вращающихся и движущихся поступательно.
Если  , то
, то
 . (2.21)
. (2.21)
Суммарный, приведённый к валу двигателя момент сопротивлений можно в общем виде записать
 , (2.22)
, (2.22)
где q – число вращающихся элементов, к которым приложены моменты потерь  , моменты полезной нагрузки
, моменты полезной нагрузки  ;
;
p – число поступательно-движущихся элементов с приложенными силами потерь на трение  и силами полезной нагрузки
и силами полезной нагрузки  .
.
После приведения всех сил и моментов
 , (2.23)
, (2.23)
где  - суммарный приведённый момент потерь в агрегате, включая момент механических потерь в двигателе;
- суммарный приведённый момент потерь в агрегате, включая момент механических потерь в двигателе;
 - суммарный приведённый момент нагрузки.
- суммарный приведённый момент нагрузки.
Формула для определения  удобна для использования в тех случаях, когда все действующие в механизме силы и моменты определены. Обычно потери на трение в механизме неизвестны и для их учёта используется КПД механизма
удобна для использования в тех случаях, когда все действующие в механизме силы и моменты определены. Обычно потери на трение в механизме неизвестны и для их учёта используется КПД механизма
 , (2.24)
, (2.24)
где  - КПД элементов кинематической цепи.
- КПД элементов кинематической цепи.
Баланс мощности
 ,
,
откуда
 , (2.25)
, (2.25)
где  - общее передаточное число от двигателя к рабочему органу механизма.
- общее передаточное число от двигателя к рабочему органу механизма.
При обратной передаче
 .
.
Поступательное движение приводится к вращательному
 .
.
Откуда
 . (2.26)
. (2.26)
При обратной передаче энергии
 . (2.27)
. (2.27)
Дата добавления: 2019-02-08; просмотров: 1342;
Поиск по сайту
Узнать еще
- Cыры, созревающие при участии слизи.
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II.III. Частично - поисковые или эвристические методы.
- III. Переход деепричастия в другие части речи
- III. Световоспринимающая и светопроводящая части глаза. Оптическая сила глаза. Аккомодация.
- III. Части речи и принципы их классификации
- IV. Переход местоимений в другие части речи
- А - ширина возводимого земляного полотна; В - ширина дорожного полотна; b - ширина проезжей части

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
