Подруливающие устройства
Основные сведения
Подруливающие устройства предназначены для повышения манёвренности судна при проходе каналов и узкостей, а также при подходе к причалу.
Эти устройства позволяют судну двигаться бортом ( лагом ), разворачиваться на месте, менять курс на малых ходах и значительно уменьшать радиус развороТ судна.
Эти устройства представляют собой цилиндрическую трубу ( туннель ), располо-
женную в плоскости миделя ( т.е. в поперечной плоскости корпуса судна ) и свободно со-
общающуюся с водой. Внутри трубы находится винт с приводным электродвигателем.
При работе электродвигателя винт создаёт поперечную силу ( упор ), направлен-
ную перпендикулярно корпусу судна.
Подруливающие устройства обычно устанавливают в носовой части судна, при их работе нос судна уходит вправо или влево относительно курса. На крупных судах могут быть несколько подруливающих устройств, расположенных по всей длине судна.
Эти устройства используют винты двух видов:
1. с фиксированным шагом ( ВФШ );
2. с регулируемым шагом ( ВРШ ).
Угол поворота лопастей ВФШ не изменяется.
Угол поворота лопастей ВРШ можно изменять, что приводит к изменению тяги.
При этом скорость электродвигателя винта не изменяется, что значительно упрощает схе-
му управления ВРШ.
Для управления ПУ применяют электрические, электрогидравлические и реже пне-
вматические системы управления.
Устройствоподруливающего устройства с ВРШ
Кинематическая схема подруливающего устройства приведена на рис. 293.
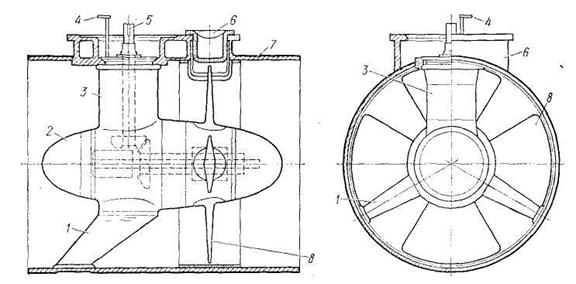
Рис. 293. Подруливающее устройство с винтом регулируемого шага :
К основным деталям устройства относятся:
1 – кронштейны ( 2 ), для крепления устройства к стенкам туннеля;
2 – обтекатель, для уменьшения сопротивления винта потоку воды;
3 – корпус подруливающего устройства;
4 – рычаг серводвигателя преобразователя шага винта ( угла разворота лопастей );
5 – вертикальный вал, для передачи вращающего момента от электродвигателя к винту;
6 – люк для смены лопастей;
7 – туннель;
8 – поворотная лопасть винта.
Подруливающее устройство находится в туннеле 7 в носовой части судна и подвешено на двух кронштейнах 1.
Винт вращается двумя электродвигателями через редуктор ( не показан ), вертикаль
ный вал 5 и коническую передачу ( на рис. 1 показана пунктиром в средней части ).
Устройство для изменения шага винта показано на функциональной схеме ( рис. 280 )
Функциональная схема электропривода подруливающего устройства с ВРШ
Функциональная схема электропривода подруливающего устройства с ВРШ приве-
дена на рис. 294.
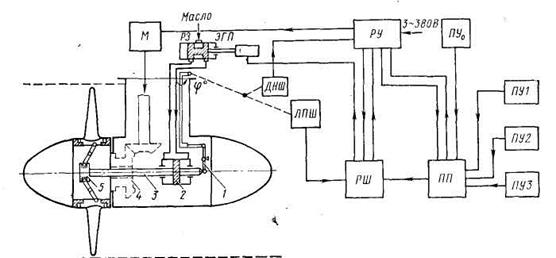
Рис. 294. Функциональная схема электропривода подруливающего устройства:
К основным деталям устройства относятся:
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопа-
стей винта в пропорциональное напряжение ;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контак-
ты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство ( щит электропитания );
РШ – регулятор шага винта, для выработки напряжения, пропорционального задава
емому углу поворота лопастей ВРШ;
ЭГП – реверсивный электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5;
4 – коническая зубчатая передача, для передачи вращающего момента электродви-
гателя на ступицу винта ( т.е. для вращения винта );
5 – редуктор, устройство для непосредственного разворота лопастей винта.
Дата добавления: 2020-02-05; просмотров: 989;
Поиск по сайту
Узнать еще
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- Аварии на объектах обустройства
- Автоматизированные загрузочные устройства – важнейшая часть механообрабатывающей системы. Классификация устройств загрузки . Питатели.
- Автоматические устройства управления и регулировок приемника
- Аналитическая модель производительности дискового зубчатого бункерного загрузочного устройства с кольцевым ориентатором
- Аналитический метод определения погрешности схемы измерительного устройства.
- Аналоговые регистрирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
