Агрегатный комплекс средств телемеханической техники с программируемыми устройствами на основе микро-ЭВМ
В настоящее время большая часть серийно выпускаемых телемеханических устройств принадлежит к агрегатному комплексу средств телемеханической техники (АСТТ), построенному на микросхемах малой и средней интеграции и относящемуся к третьему поколению аппаратуры контроля и управления. Эти устройства успешно применяются в действующих автоматизированных системах управления.
Однако развитие АСУ, создание иерархических интегрированных систем выдвигает новые требования к средствам телемеханики - организации информационных сетей с широким оперативным обменом сообщениями по вертикали (между объектами разных уровней иерархии) и горизонтали (между объектами одного уровня иерархии), что влечет за собой существенное усложнение функций и режимов работы средств телемеханики.
Попытка построения новых телемеханических устройств на элементах малой и средней интеграции, применяемых в настоящее время в аппаратуре третьего поколения, привела бы к увеличению в два-три раза объемов аппаратуры и трудоемкости ее изготовления. Другой путь, основанный на включении в состав телемеханических комплексов серийно выпускаемых мини-ЭВМ, позволяет получить устройства, выполняющие усложненные функции, но приводит к росту объемов и стоимости оборудования.
Единственная реальная возможность достижения поставленных целей заключается в использовании встроенных микро-ЭВМ. Эта тенденция получает, по-видимому, общее признание. Известны разработки фирмы Brown Boveri (Швейцария), например комплекс ED-1000, каждое устройство которого содержит микро-ЭВМ в качестве блока - централи, фирмы Fujitsu (Япония) - универсальная система телемеханики Fatec, в состав функциональных блоков которой входит микро-ЭВМ.
Но в этих системах функции микро-ЭВМ ограничены выполнением традиционных для телемеханики операций, не использованы все преимущества машин, например возможность сжатия данных с целью разгрузки каналов связи.
Вторая очередь АСТТ состоит из устройств, содержащих одну или несколько встроенных микро-ЭВМ как в аппаратуре пунктов управления (ПУ),так и в аппаратуре контролируемых пунктов (КП). Эти устройства образуют ряд управляющих вычислительных телекомплексов (УВТК), каждый из которых предназначен для обслуживания группы отраслей народного хозяйства. К их числу относятся телекомплексы:
УВТК-100 - для продуктопроводов большой протяженности с магистральной структурой каналов;
УВТК-300 - для предприятий металлургии, химии и т.п., имеющих радиальные линии связи и допускающих разделение во времени при общении ПУ с отдельными КП;
УВТК-500 - для энергосистем и энергообъединений с протяженными каналами радиальной структуры и одновременным-общением между ПУ и всеми КП;
УВТК-600 - для нефте- и газодобывающих предприятий с рассредоточенным расположением объектов и древовидной структурой каналов.
В комплексе предусмотрена возможность произвольного выбора в пределах определенных ограничений числа устройств КП и произвольного задания информационной емкости КП по каждой из выполняемых функций: телеизмерение текущих значений параметров (ТИТ), телеизмерение интегральных значений параметров (ТИИ), телесигнализация (ТС), телеуправление (ТУ), телерегулирование (ТР), обмен буквенно-цифровой информацией (БЦИ).
Для того чтобы объединить большое число устройств, содержащих микро-ЭВМ, в многомашинный комплекс, необходимо решить ряд проблем. Поскольку все микро-ЭВМ, входящие в комплекс, связаны общими задачами сбора, обработки и передачи информации, возникает проблема рационального разделения функций между центральными и периферийными вычислителями.
Наряду с проблемой разделения функций ставится задача обеспечения связи между микро-ЭВМ, входящими в комплекс. Для тех из них, которые размещаются в разных КП, соединенных каналами связи, эта задача решается традиционными для телемеханики методами (рис. 1) - с помощью блоков сопряжения с каналом (БСК), выполняющих функции преобразования параллельного кода в последовательный и обратно, синхронизации, поэлементного приема, а в некоторых случаях и повышения достоверности.
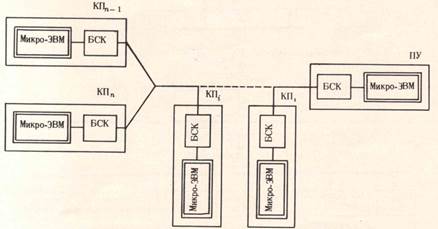
Рис. 1. Структура многомашинного комплекса с общением через каналы связи
Для нескольких микро-ЭВМ, входящих в состав одного пункта управления или одного контролируемого пункта, задача обмена информацией решается с учетом того, что каждое устройство содержит не только микро-ЭВМ, но и другие блоки. Классификационная таблица функциональных блоков АСТТ приведена на рис. 2. Блоки-централи управляют работой периферийных блоков, обмениваясь информацией с ними через интерфейсные каналы.
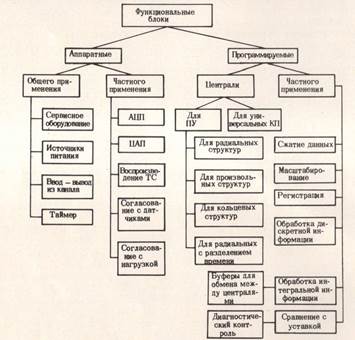
Рис. 2. Классификационная таблица функциональных блоков АСТТ
Обмен информацией между централями выполняется по одному из трех вариантов.
Первый (рис. 3) предусматривает обмен между микро-ЭВМ, образующими две централи (каждая с отдельной межотраслью), через общее ОЗУ, к которому они обращаются с разделением во времени. Одна централь выполняет функцию обмена информацией с несколькими радиальными каналами связи через блоки БСК, а другая - функции управления блоками ввода-вывода и обработки различных видов информации.
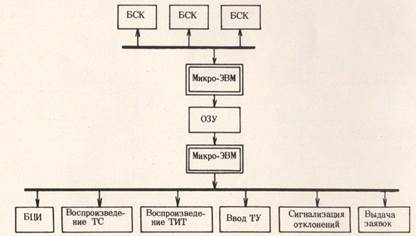
Рис. 3. Структура устройства ПУ со связью микро-ЭВМ через общее ОЗУ
Второй вариант организации обмена - через буферные блоки - используется для обмена информацией между двумя микро-ЭВМ, работающими на раздельные магистрали (рис. 4). Существует также вариант структуры с общей магистралью для нескольких микро-ЭВМ (рис. 5).

Рис. 4. Структура устройства ПУ со связью микро-ЭВМ через буферные блоки
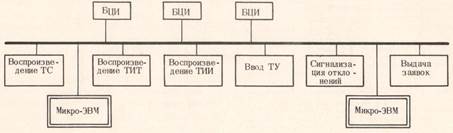
Рис. 5. Структура устройства ПУ со связью микро-ЭВМ через общую магистраль
Рассмотренные структуры дают возможность не только расширить функции и информационные емкости телемеханических устройств за счет наращивания числа микро-ЭВМ, но и решить вопросы резервирования для повышения надежности устройств.
Наибольшая надежность достигается в том случае, когда программы их работы не разрешаются при исчезновении напряжения питания. Для этой цели стремятся записать все программы в постоянном запоминающем устройстве (ПЗУ) или полупостоянном запоминающем устройстве (ППЗУ). В ОЗУ следует вносить только те данные, которые могут быть автоматически восстановлены при возобновлении подачи питания.
Принятый в АСТТ принцип разделения программ между ПЗУ и ППЗУ состоит в том, что в первое записываются неизменяемые части программ, общие для всех модификаций устройств одного типа, а во второе - переменные части, определяющие конкретные модификации.
При переходе от одной модификации устройства к другой желательно ограничиться только изменением программ в ППЗУ, но поскольку в устройствах АСТТ часть функций выполняется специализированными аппаратными блоками, приходится сочетать этот метод с изменением числа, а в некоторых случаях и типов аппаратных блоков.
Анализ требований к устройствам КП, входящим в телемеханические комплексы различного назначения, показал, что в них могут использоваться одинаковые аппаратные и программные методы общения с источниками и приемниками информации, а также алгоритмы ее обработки. Переменными являются алгоритмы приема - передачи информации по каналам связи, виды сигналов в каналах, методы поэлементного приема, синхронизации.
С учетом изложенного принципа обеспечения модификаций оказалось рациональным создать унифицированное устройство КП, общее для телемеханических комплексов различных типов. В процессе создания такого устройства были решены вопросы размещения программ и данных в памяти микро-ЭВМ.
Основные программы работы микро-ЭВМ в телекомплексах:
- распределение времени между различными задачами в соответствии с заданными приоритетами;
- формирование буферных массивов и первичная обработка данных;
- управление работой устройств;
- реализация алгоритмов сжатия данных;
- формирование посылок для передачи в канал связи;
- управление приемом - передачей в зависимости от структуры канала связи;
- преобразование данных для воспроизведения информации;
- управление воспроизведением информации;
- проверка работоспособности микро-ЭВМ.
Программы, выполняемые микро-ЭВМ, можно разделить на два основных вида.
К первому относятся программы, которые не зависят от области применения комплексов и видов канала связи. Это обработка информации от датчиков на КП и подготовка данных для устройств воспроизведения на ПУ. Переменная часть таких программ ограничивается некоторым набором констант, прямо или косвенно заданным в ППЗУ.
Некоторые величины могут быть заданы в 03У,например номер цифрового прибора и адрес вызванного на этот прибор параметра. Программные модули полностью размещаются в ПЗУ. Если в каком-либо комплексе нет тех или иных источников информации, то отсутствуют соответствующие запросы от устройств и программы, связанные с обработкой информации от этих устройств, не вызываются. Исключение каких-либо видов обработки информации задается соответствующими константами в ППЗУ.
Второй вид - это программы каналов связи. Хотя дисциплина работы по каналам связи может существенно различаться, в соответствующих программах можно выделить общие части. Например, в программе передачи всегда присутствует задача формирования в буферной памяти очередной посылки (в соответствии с приоритетами).
Для обеспечения достаточной гибкости компоновки программ они разбиты на более мелкие функционально-ориентированные модули, каждый из которых выполняет одну небольшую функцию и размещается в ПЗУ.
Модули обмениваются информацией через общие ячейки оперативной памяти, адреса которых определены для каждого модуля соглашением о связях. Операцию объединения модулей выполняет программа связи, размещенная в ППЗУ. Расширение функционального состава модулей также выполняется в ППЗУ. Предполагается, что объем ПЗУ позволяет разместить достаточно полный набор стандартных модулей.
Программное обеспечение устройств телемеханики с встроенными микро-ЭВМ включает в себя тесты для контроля основных узлов, арифметикологического устройства, каналов ввода-вывода, ОЗУ.
Вместе с микро-ЭВМ в устройствах устанавливается панель управления, которая обеспечивает запись информации в ОЗУ, считывание из всех устройств памяти по любому адресу, приостанов работы машины и возобновление ее с места останова. Работа аппаратных блоков контролируется с помощью специализированных сервисных панелей или стендов.
В состав сервисного оборудования АСТТ входят также стенды для отработки программ при создании и наладке устройств телемеханики. На начальной стадии проектирования осуществляется проверка алгоритмов на универсальных ЭВМ с помощью моделирующих программ.
Для встраивания в устройства телемеханики, в особенности в устройства КП, удобна микро-ЭВМ "Электроника С5-И". Ее удалось использовать в одном из перечисленных выше управляющих вычислительных телекомплексов, а именно в УВТК-500, для чего были изготовлены специализированные БИС ПЗУ - два для КП и два для ПУ. Изготовлению ПЗУ предшествовали работы по отладке программ на универсальной ЭВМ и последующей проверке их на микро-ЭВМ " Электроника С5-01 в сочетании с макетом, имитирующим основные блоки УВТК-500.
На рис. 6, 7 приведены структурные схемы устройств КП и ПУ соответственно. Устройства имеют магистральную структуру. Микро-ЭВМ выходит на магистраль через преобразователь интерфейса. Названия основных блоков соответствуют выполняемым функциям.
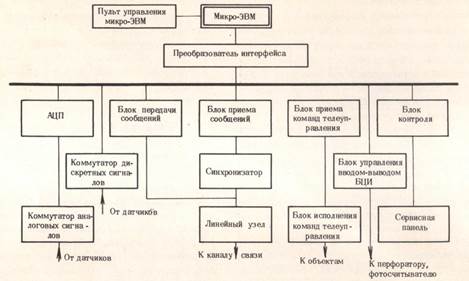
Рис. 6. Структурная схема устройства контролируемого пункта УВТК-500
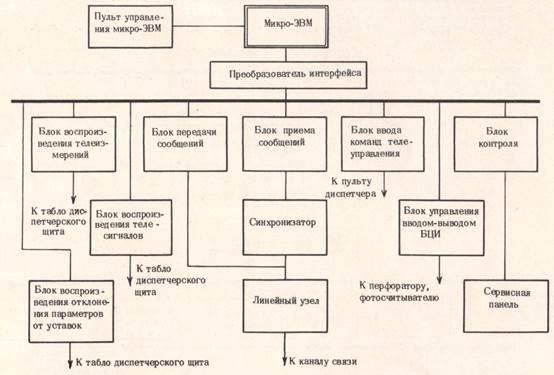
Рис. 7. Структурная схема устройства пункта управления УВТК-500
Для общения с каналом связи установлены блоки передачи и приема сообщений, синхронизатор и линейный узел, а для контроля работы каждого устройства - блок контроля и сервисная панель. Отдельно предусмотрены встроенные пульты управления микро-ЭВМ, позволяющие вывести на индикацию любое слово из памяти или записать нужное слово в ОЗУ по заданному адресу.
Устройства телекомплекса УВТК-500 выполнены на типовых конструкциях управляющих телекомплексов, принятых в приборостроении.
В заключение можно сказать, что использование микро-ЭВМ позволяет менять функции и основные характеристики устройств при минимальных изменениях в аппаратуре, применять различные виды обработки, в том числе сжатие данных с целью разгрузки каналов связи, совмещать с традиционными телемеханическими функциями задачи, выполняемые в настоящее время самостоятельными устройствами местной автоматики на контролируемых пунктах и устройствами обработки информации на пунктах управления.
Дата добавления: 2024-01-23; просмотров: 1975;
Поиск по сайту
Узнать еще
- Автоматизация управления фотонаборным комплексом
- Антиадренергические неконкурентные средства
- Архитектура ряда микро-ЭВМ "Электроника НЦ"
- Архитектура технических средств интегрированной САПР
- Бетонные стройматериалы на основе отходов деревопереработки и другого местного сырья
- Виды и характеристики транспортных средств
- Генератор кодовых последовательностей с применением микро-ЭВМ «электроника с5-11»

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
