На поступательное и вращательное
В основе этого метода лежит следующая теорема: всякое плоскопараллельное перемещение твердого тела может быть получено с помощью одного поступательного и одного вращательного движения.
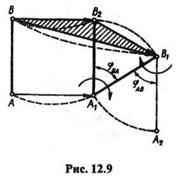
Пусть за время  t отрезок АВ,определяющлй плоскопараллельное движение тела, переместился в положение А1В1 (рис. 12.9).
t отрезок АВ,определяющлй плоскопараллельное движение тела, переместился в положение А1В1 (рис. 12.9).
Предположим, что отрезок АВ вначале перемещался только поступательно, причем все его точки двигались одинаково, как точка А. Таким образом, отрезок перешел в положение А1В2после чего его можно переместить в положение А1В1 посредством только вращательного движения вокруг точки А1.Отсюда видно, что сложное плоскопараллельное движение состоит из двух простейших движений: поступательного и вращательного, причем можно считать, что эти движения происходят одновременно.
Установим зависимость между векторами скоростей точек А и В.Для этого соединим прямыми точки А, А1и В, В1,В2, в результате чего получим следующую зависимость между векторами перемещений точки В:

|
Так как ВВ2 = АА1, то можно записать, что
|


|
Разделим все члены равенства на t и перейдем к пределу при t, стремящемся к нулю:

|
что дает
где vB— вектор абсолютной скорости точки В; vA — вектор абсолютной скорости точки А; vВА — вектор скорости
точки В в относительном вращательном движении отрезка АВ вокруг точки А, направленный перпендикулярно отрезку АВ.
Таким образом, плоскопараллельное движение тела может осуществляться путем одновременно происходящих вращательного и поступательного движений; поступательное движение можно считать переносным, а вращательное — относительным. Вектор абсолютной скорости какой-то точки В равен вектору абсолютной скорости любой другой точки А плюс вектор скорости точки В в относительном вращательном движении отрезка АВ вокруг точки А.
Точку, вокруг которой происходит относительное вращательное движение, будем называть полюсом.
Если за полюс вместо точки А принять точку В,то, рассуждая аналогично, получим
Сравнивая это векторное равенство с предыдущим, видим, что векторы относительных скоростей vВА иvАВ по модулю равны между собой, т. е.

Из рис. 12.9 видно, что направление относительного вращения и угол поворота отрезка АВ за какой-то промежуток времени не зависят от выбора полюса, т. е.

Продифференцировав это равенство по времени, получим

|
Следовательно, относительная угловая скорость от выбора полюса не зависит. Аналогично,

Следовательно, и относительное угловое ускорение от выбора полюса не зависит.
Из сказанного следует, что при разложении плоскопараллельного движения на поступательное и вращательное поступательная часть движения в общем случае зависит от выбора полюса, а вращательная часть движения от выбора полюса не зависит.
Так как за полюс может быть выбрана любая точка плоскости, в том числе и мгновенный центр скоростей, то при разложении плоскопараллельного движения на поступательное и вращательное угловая скорость относительного вращательного движения всегда равна абсолютной угловой скорости.
Если векторное равенство vА =vВ +vАВ спроецировать на направление прямой АВ,то
так как пр. vАВ = 0. Следовательно, при плоскопараллельном движении проекции скоростей двух точек плоской фигуры на направление прямой, соединяющей эти точки, равны между собой.
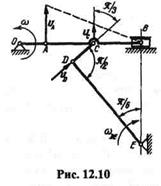
Пример 12.2. Кривошипный механизм связан шарнирно в середине С шатуна со стержнем CD,а последний со стержнем DE, который может вращаться вокруг точки Е.Определить угловую скорость  DE стержня DE в указанном на рис. 12.10 положении кривошипного механизма, если точки В и Е расположены на одной вертикали; угловая скорость ю кривошипа ОА равна 8 рад/с, ОА = 25 см, DE = 100 см,
DE стержня DE в указанном на рис. 12.10 положении кривошипного механизма, если точки В и Е расположены на одной вертикали; угловая скорость ю кривошипа ОА равна 8 рад/с, ОА = 25 см, DE = 100 см,  CDE =
CDE =  /2 рад и BED = /6 рад.
/2 рад и BED = /6 рад.
Решение. Прежде всего определим скорость точки А кривошипа ОА:

|
В заданном положении механизма ползун В занимает крайнее правое положение и его скорость в этот момент равна нулю. Следовательно, точка В в данный момент — мгновенный центр скоростей шатуна АВ.Так как скорости точек шатуна прямо пропорциональны их расстояниям от мгновенного центра скоростей, то запишем пропорцию
из которой определим модуль скорости точки С:

|
Вектор скорости vс перпендикулярен шатуну АВ. Вектор скорости точки D перпендикулярен стержню DE, т. е. направлен вдоль стержня DC.
Скорость точки D определим, разложив сложное плоскопараллельное движение звена DC на поступательное и вращательное по формуле
|
где вектор относительной скорости vDC перпендикулярен звену DC. Спроецировав это векторное равенство на направление прямой DC,получим

Выразив скорость точки D через угловую
скорость стержня DE,получим

откуда, подставив числовые значения, найдем

Раздел третий
ДИНАМИКА
Глава 13
Дата добавления: 2021-09-07; просмотров: 552;
Поиск по сайту
Узнать еще
- Вращательное бурение с транспортировкой разрушенной породы на поверхность шнековой колонной
- Вращательное движение и его кинематические характеристики
- Вращательное движение твердого тела.
- Вращательное движение твердых тел
- Вращательное движение. Угловая скорость, угловое ускорение
- Законы Ньютона для произвольного тела. Поступательное движение
- Модель твердого тела в механике. Поступательное и вращательное движение твердого тела

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
