Некоторые определения теории
Механизмов и машин
При дальнейшем изучении предмета теоретической механики, в особенности при решении задач, мы столкнемся с новыми понятиями, относящимися к науке, которая называется теорией механизмов и машин.
Теория механизмов и машин занимается приложением законов теоретической механики к механизмам и машинам.
Теория механизмов и машин как наука возникла сравнительно недавно, в XVIII в. Этот и последующий век ознаменовались многими замечательными изобретениями, как, например, паровая машина, паровоз, двигатель внутреннего сгорания, самолет. Широкое применение механизмов и машин в практической деятельности людей привело к необходимости создания новой науки. Основоположником русской школы теории механизмов и машин был П. Л. Чебышев (1821—1894).
Ознакомимся с основными определениями теории механизмов и машин.
Механизмом называется совокупность связанных между собой тел, имеющих определенные движения. Механизмы служат для передачи или преобразования движения.
Машина есть механизм или сочетание механизмов, осуществляющих определенные целесообразные движения для преобразования энергии (энергетические машины), изменения формы, свойств, состояния и положения предмета труда (рабочие машины) или для сбора, переработки и использования информации (информационные машины).
Таким образом, всякая машина состоит из одного или нескольких механизмов, но не всякий механизм является машиной.
Работа механизма или машины обязательно сопровождается тем или иным движением ее органов. Это основной фактор, отличающий механизмы и машины от сооружений — мостов, зданий и т. д.
Простейшей частью механизма является звено. Звено — это одно тело или неизменяемое сочетание тел.
Два звена, соединенные между собой и допускающие относительное движение, называются кинематической парой. Кинематические пары бывают низшие и высшие. Звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары), звенья высших пар соприкасаются по линиям и точкам (зубчатые пары, подшипники качения).
Совокупность кинематических пар называется кинематической цепью. Кинематические пары и цепи могут быть плоскими и пространственными.
|
Механизм получается из кинематической цепи путем закрепления одного из звеньев. Это неподвижное звено называется станиной или стойкой.
Звено, вращающееся вокруг неподвижной оси, называется кривошипом. Звено, качающееся вокруг неподвижной оси, называется балансиром или коромыслом. Звено, совершающее сложное движение параллельно какой-то плоскости, называется шатуном. Звено, движущееся возвратно-поступательно по станине, называется ползуном. Подвижное звено, выполненное, например, в виде рейки с пазом и совершающее вращательное или иное движение, называется кулисой, в пазу скользит камень кулисы.
Звено, которому извне сообщается определенное движение, называется ведущим. Остальные подвижные звенья называются ведомыми.
Различные звенья и кинематические пары механизмов имеют свои условные обозначения по ГОСТу, которые и применяются в этой книге.
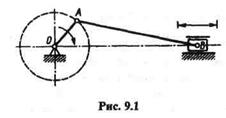
В качестве примера рассмотрим широко распространенный криво-шипно-ползунный механизм, схематически изображенный на рис. 9.1.
Этот механизм служит для преобразования вращательного движения в возвратно-поступательное (например, в компрессорах, поршневых насосах, эксцентриковых и кривошипных прессах) или, наоборот, для преобразования возвратно-поступательного движения во вращательное (например, в паровых машинах, двигателях внутреннего сгорания).
Кривошипно-ползунный механизм состоит из четырех звеньев: кривошипа ОА,шатуна АВ,ползуна В,станины и четырех кинематических пар: вращательной пары станина—кривошип, вращательной пары кривошип—шатун, вращательной пары шатун—ползун и поступательной пары ползун—станина.
Кривошипно-ползунный механизм — плоский, его ведущим звеном является либо кривошип, либо ползун.
Дата добавления: 2021-09-07; просмотров: 976;
Поиск по сайту
Узнать еще
- U-Pb метод определения возраста по циркону
- А) Общие определения
- Авторы теории классической системы сенсорного воспитания Ф Фребель, М. Монтессори и др.
- Азы наивной теории множеств
- Аксиоматика Цермело-Френкеля теории множеств
- Аксиоматический подход к теории вероятностей
- Аксиоматическое построение теории вероятностей
- Алгебраические основы теории чисел.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
