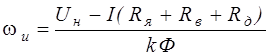
Реостатное регулирование
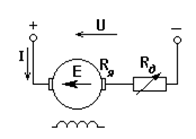
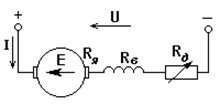
Это самый простой и самый неблагоприятный способ регулирования скорости и (или) момента. В якорную цепь последовательно, если питание осуществляется от источника напряжения (рис. 35,а), включаются дополнительные резисторы.
а) б)
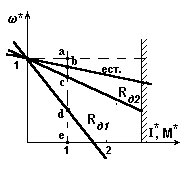
Рис. 35. Схема (а) и характеристики (б) при реостатном регулировании двигателя независимого возбуждения
Скорость идеального холостого хода при включении Rд не изменится, а наклон характеристик будет увеличиваться пропорционально R = Rя+Rд.
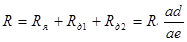
Соотношение позволяет легко решать прямую задачу - построить характеристики, если задано R, и обратную - найти R и Rд для заданной характеристики. Так, на рис. 35,б
 ,
,  ,
,  ,
,
 .
.
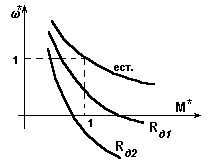
В электроприводе с двигателем последовательного возбуждения при U=Uн (рис. 36,а) и известной естественной характеристике
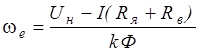
можно использовать уравнение искусственных характеристик при реостатном регулировании
а) б)
Рис. 36. Схема (а) и характеристики (б) при реостатном регулировании двигателя последовательного возбуждения
Механическая характеристика может быть построена по известной зависимости М(I). Примерный вид механических характеристик при реостатном регулировании показан на рис. 36б.
Дата добавления: 2017-06-13; просмотров: 1492;
Поиск по сайту
Узнать еще
- VII. Регулирование частоты вращения двигателя
- Автоматическое регулирование (РОУ) редукционно-охладительных установок.
- Автоматическое регулирование в области дуговой сварки
- Автоматическое регулирование возбуждения СД.
- Автоматическое регулирование заполнения испарителя
- Автоматическое регулирование как вид управления
- Автоматическое регулирование непрерывных процессов.
- Автоматическое регулирование процесса сварки электронным лучом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
