Принцип работы ПИД-регулятора.
Для поддержания требуемого значения координаты электропривода (чаще частоты вращения) используются различные законы регулирования. Наибольшее распространение получил пропорционально-интегрально-дифференциальный закон. Устройство или программный алгоритм, реализующий этот закон, называется ПИД-регулятором.
ПИД-регулятор на выходе выдает управляющее воздействие y, пропорциональное ошибке регулирования, а также ее изменению и накоплению
где y – управляющее воздействие; ώ –ошибка регулирования; kп, kи, kд – коэффициенты усиления пропорционального, интегрального и дифференциального звеньев соответственно.
Выбрав коэффициенты kп, kи, kд можно повысить быстродействие электропривода.
Релейно-контакторные системы управления
Под термином релейно-контакторные системы управления понимаются логические системы управления, построенные на релейно-контакторной элементной базе и осуществляющие автоматизацию работы электродвигателей. К достоинствам таких систем относят гальваническую развязку силовых цепей и цепей управления, большие коммутационные мощности, высокую помехоустойчивость. К недостаткам – контактная коммутация, ограниченное быстродействие, повышенные массогабаритные показатели.
На рис.25 приведен пример релейной системы управления нереверсивного асинхронного электропривода с возможностью динамического торможения.
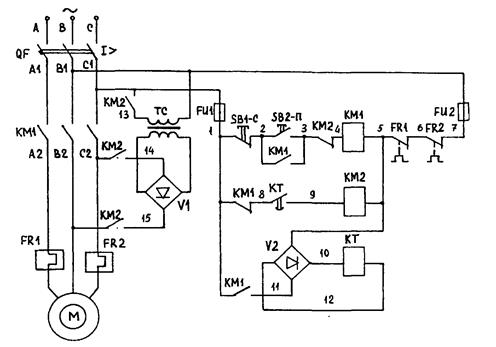
Рис.25 Релейно-контакторная система управления АД
Дата добавления: 2017-06-13; просмотров: 2148;
Поиск по сайту
Узнать еще
- C учетом изменения статической работы балки
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Режимы работы электротехнических устройств.
- I. Этические принципы психолога
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Прием и оформление заказов на услуги (работы)
- II. Принцип действия и режимы работы синхронной машины

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
