Автоматические системы управления контейнерными пунктами (терминалами)
Под руководством ВНИИЖТа разработаны исходные эксплутационные требования к автоматизации управления контейнерной транспортной системой (АСУ КТС), что способствует созданию автоматизированных комплексов современных технических средств и высокоэффективных процессов перевозки и перегрузки контейнеров.
На рис.4.8 показана схема автоматизированного контейнерного пункта (терминала).
Выпускаемые в настоящее время контейнерные краны имеют ручное управление при помощи командоконтроллера. Для эффективного их использования в АСУ требуется сопряжение аппаратуры управления кранами с ЭВМ и автоматизация управления приводов крановых механизмов. Для взаимодействия с техническими средствами АСУ создаются системы теле-и программного управления кранами, а также специальная аппаратура приема-передачи данных, идентификации положения крана и грузоподъемной техники, а также устройства автоматической застропки-отстропки и поворота контейнера. Технические средства обеспечивают автоматизацию и оптимальную технологию производства работ с контейнерами и контроль за их выполнением. 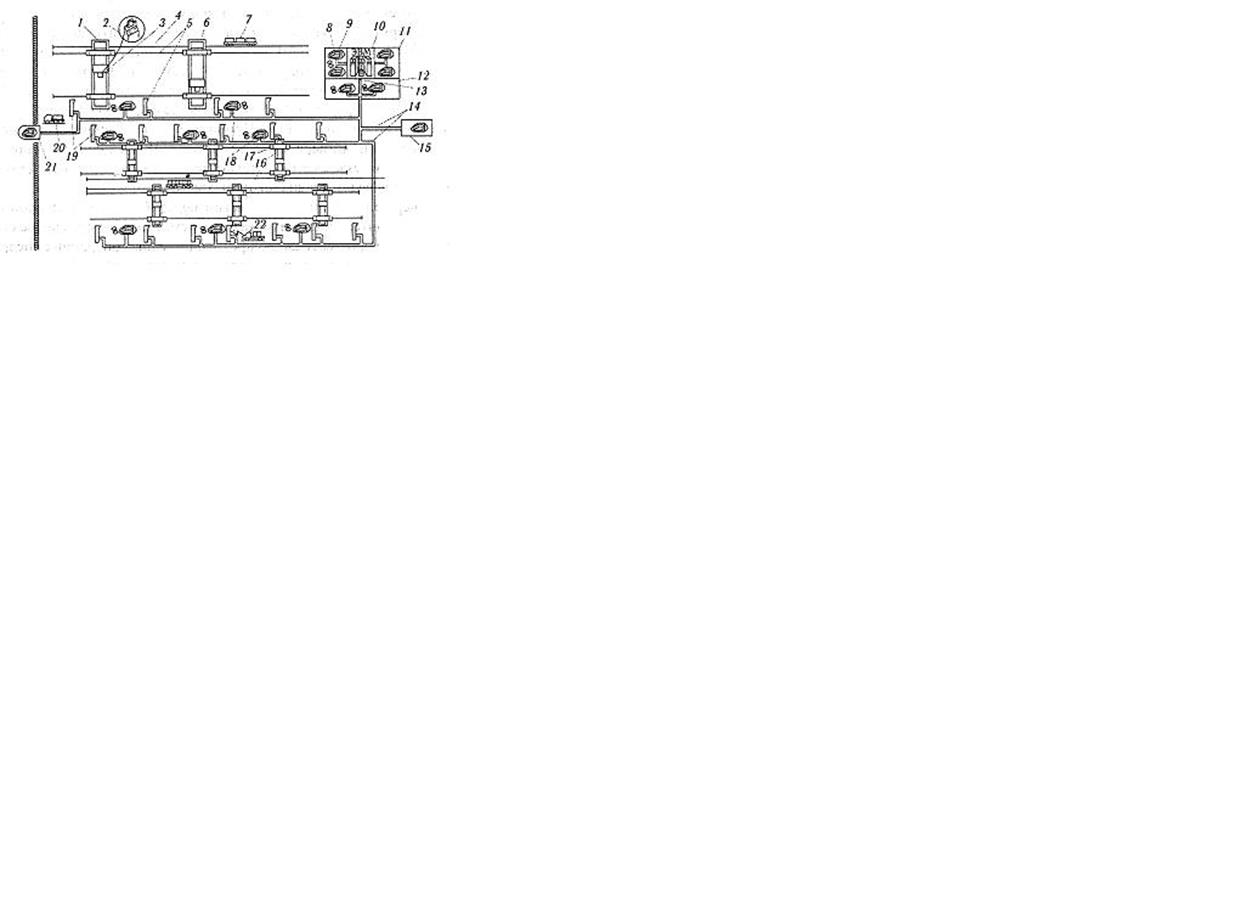
Рис.4.8 Схема автоматизированного контейнерного пункта:
1,6- краны для крупнотоннажных контейнеров; 2- пульт машиниста; 3- кабина машиниста; 4- железнодорожный путь; 5- подкрановые рельсы; 7- вагоны с крупнотоннажными контейнерами; 8- центр управления; 9- дисплей старших приемосдатчиков; 10 зал ЭВМ; 11- дисплей товарных кассиров; 12- дисплей диспетчера системы; 13-дисплей в технической конторе станции; 14- каналы передачи данных; 15- дисплей автодиспетчера; 16- краны среднетоннажных контейнеров; 17- кабина крана; 18- дисплей приемосдатчиков; 19- устройства ввода жетонов; 20- автомобиль с контейнерами на выходе с контейнерного пункта; 21- дисплей контрольно – пропускного пункта; 22- автомобиль с контейнерами при выполнении перегрузочных операций.
Техническое обеспечение реализуется в основном на типовых средствах автоматики, связи и вычислительной техники, управляющей ЭВМ современной модификации. АСУ использует специальную аппаратуру для приема-передачи данных о работе контейнерного пункта, положении кранов и кранового оборудования (устройства автоматического захвата) и освобождения контейнеров, аппаратура для визуального считывания машинистом и передачи голосом приемосдатчику номеров контейнеров), для автоматического считывания номеров контейнеров, определения занятия свободных мест на контейнерной площадки и местоположения контейнеров, подлежащих отгрузке, планирования завоза и вывоза контейнеров автотранспортом и решения других задач организации контейнерного пункта.
Технология контейнерного пункта с АСУ заключается в следующем. По мере прибытия вагонов с контейнерами информация о них с натурных листов поезда передается из технической конторы в ЭВМ. Перевозочные документы поступают в товарную контору и товарный кассир, используя накладную, контролирует правильность введенной информации и дополняет её новыми реквизитами[род и масса груза, наименование (коды) получателя и отправителя, станций отправления и назначения для транзитных контейнеров]. Одновременно по мере накопления на пути сортировочного парка вагоны списывают и указывают последовательность расположения на них контейнеров. Эта информация с дисплея в технической конторе также вводится в ЭВМ. Работы всех операторов ЭВМ ведется в диалоговом режиме. После подачи всех вагонов на контейнерную площадку старший приемосдатчик списывает номера вагонов, указывая их координаты. На основании предварительной информации из технической конторы и планируемого завоза-вывоза грузов вычислительная машина составляет план комплектования, минимизируя суммарные пробеги грузов.
Завоз контейнеров на контейнерный пункт планируют по завизированным накладным и планам погрузки. ЭВМ составляет план работы кранов, готовит для водителя – экспедитора наряд на вывоз и завоз очередных контейнеров, а также план оптимального объезда зон на контейнерных площадках (при работе автомобиля в нескольких зонах).
При вывозе контейнеров с контейнерного пункта их номера вводятся в ЭВМ с дисплея установленного на выезде с территории. В памяти ЭВМ постоянно обновляется модель контейнерной площадки, где фиксируются все перемещения контейнеров. АСУ контейнерного пункта позволяет следить за использованием каждого контейнера, вести учет их простоя получать отчетные данные, составлять более точно оперативные планы на смену, сутки, обеспечивает взаимосвязь контейнерных пунктов в узлах железных дорого, включая речные и морские порты.
Наиболее широкое распространение получили системы телеуправления с частотным разделением сигналов. Простейшим видом частотного разделения сигналов является прямое избирание, когда команде соответствует определенная частота. При частотном разделении сигналов для передачи значительного числа команд требуется расширение диапазона рабочих частот, что снижает помехоустойчивость.
В комбинационных способах общее число возможных команд зависит от способа кодирования. Для кодирования чаще всего применяют двоичную систему. С целью формирования и избирание сигналов используют шифраторы и дешифраторы. Последние расшифровывают сигналы для включения исполнительного реле необходимого исполнительного механизма крана или его оборудования.
При программном управлении кранами командоаппарат с помощью шифратора и программного устройства осуществляет магнитную запись программы для наиболее благоприятного режима работы крана. При автоматическом управлении команды поступают с программного устройства на дешифратор, релейно-контакторный блок и приводы крана. Обратная связь может работать от различных датчиков или специальных блоков для сравнения программы с её исполнением. Серийно выпускаемые микро ЭВМ, обладающие высокой надежностью и малыми габаритами, на больших интегральных схемах позволяют создавать бортовые системы управления приводами кранов.
Находит применение позиционная системы числового программного управления кранами совместно с дискретной измерительной системой, которая на шаг( единицу перемещения) выдает один импульс. Он поступает в счетчик, суммирующий число импульсов с учетом их знака.
Дискретный принцип измерения приращений заключается в том что импульсы прибавляются к определенному числовому значению, записанному в счетчике, или вычитаются из него. Счетчик действительного положения имеет логическое устройство переноса начала координат, что позволяет предварительно записать в нем любое число. Состояние счетчика в начальный момент работы, т.е. после включения всего устройства, приводится к началу координат. Система управления содержит дифференцирующее сравнивающее устройство, точка позиционирования может быть задана в абсолютной форме, т.е. отнесена к первоначальному положению координат. Разница между положением крана в данный момент и заданным положением рассчитывается системой по модулю и знаку, соответственно которым выдается сигнал управления приводом.
На выходе сравнивающего, решающего устройства включается дифференциальное декодирующее устройство, которое выдает в схему управления приводом сигнал торможения и остановки, когда контейнер приближается к заданной позиции. В соответствии с этим сигналом скорость привода снижается.
Позиционную систему числового программного управления строят на унифицированных узлах, а функциональные блоки – на интегральных элементах.
Унифицированная схема программного управления, разработанная ВНИИПТмашем, позволяет корректировать программу при изменяющихся условиях работы крана. При движении крана следящая система выдает в суммирующий блок импульсы. Они характеризуют положение механизмов крана относительно некоторого, условно выбранного нулевого положения. При совпадении числа импульсов, выдаваемых следящей системой по каждому из механизмов крана, с числом импульсов, предусмотренных программой, блок сравнения выдает сигнал в автоматическое управляющее устройство.
Для организации двусторонней оперативной связи на контейнерном пункте между диспетчером, приемосдатчиком, машинистами кранов, водителями автотранспорта и другими исполнителями технологического процесса контейнерного пункта применяется система связи «Строп». Эта система обеспечивает взаимный вызов и ведение переговоров, передачу сообщений и сведений громкоговорящего оповещения. Связь между стационарными объектами и кранами осуществляется в результате электромагнитного взаимодействия приемопередающих антенн мобильных комплексов каналообразующей аппаратуры с индуктивным шлейфом проложенным на шпалах вдоль подкранового пути и соединенным кабельной линией со стационарным комплектом каналообразующей аппаратуры, которая обеспечивает до пяти дуплексных каналов связи между кранами и стационарными объектами. Длина индуктивного шлейфа соответствует длине контейнерной площадки и может быть до 600 м при расстоянии между проводами 500мм. Высота подвески антенн над уровнем прокладки шлейфа 200 – 300мм. Рабочий диапазон частот 24-96 кГц. Мощность, передаваемая в линию громкоговорящей связи составляет 100 Вт.
Глава 5
Дата добавления: 2016-09-26; просмотров: 3256;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
