Определение скоростей и ускорений структурных групп
3.5.1. Группа Ассура 1-го вида (рис. 3.7, а)
Дано: скорости точек  и
и  . Определить: скорости точек
. Определить: скорости точек  ,
,  ,
,  ; угловые скорости звеньев
; угловые скорости звеньев  ,
,  .
.
Выразим скорость точки В в виде суммы векторов переносного и относительного движения
 ;
;  (3.31)
(3.31)
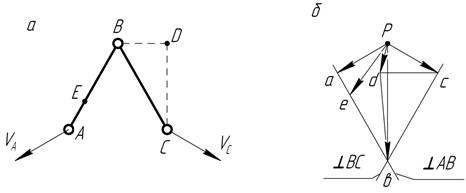
Рис. 3.7. Построение плана скоростей структурной группы 1-го вида.
Скорость точки В неизвестна ни по величине, ни по направлению. Относительные скорости  и
и  неизвестны по величине, но известны по направлению:
неизвестны по величине, но известны по направлению:  ;
;  .
.
Система векторных уравнений определима, если число уравнений равно числу неизвестных, умноженному на 2. Наша система содержит два векторных уравнения и четыре неизвестных, то есть является определимой.
Строим план скоростей (рис. 3.7, б). Откладываем произвольный отрезок ра в направлении вектора  , определяем масштабный коэффициент
, определяем масштабный коэффициент
 .
.
С учетом масштабного коэффициента откладываем отрезок рс в направлении вектора 
 .
.
Через точку а проводим прямую, перпендикулярную АВ, через точку с —прямую, перпендикулярную ВС. Точка пересечения этих прямых (направлений относительных скоростей) определяет общее решение двух уравнений (3.31).
Скорость точки D определяем по принципу подобия. Для этого строим на отрезке bс подобный и сходственный треугольник (  ~
~  ). Соединяем полюс с точкой d и определяем скорость точки D
). Соединяем полюс с точкой d и определяем скорость точки D
Скорость точки Е определяем также по принципу подобия
 (3.32)
(3.32)
отсюда
 (3.33)
(3.33)
Отложив на отрезке аb плана скоростей длину отрезка ае, соединяем точку е с полюсом и определяем скорость точки Е:
Далее определяем угловые скорости звеньев

 (3.34)
(3.34)
где  — угловая скорость звена АВ;
— угловая скорость звена АВ;
 — угловая скорость звена ВС;
— угловая скорость звена ВС;
АВ, ВС — отрезки на плане механизма, изображающие длины звеньев в масштабе;
 — масштабный коэффициент длин.
— масштабный коэффициент длин.
Для того, чтобы определить направления угловых скоростей, векторы относительных скоростей  и
и  следует мысленно перенести в точку В плана механизма. Вектор относительной скорости вращает звено АВ по часовой стрелке, вектор вращает звено ВС против часовой стрелки (см. рис. 3.7).
следует мысленно перенести в точку В плана механизма. Вектор относительной скорости вращает звено АВ по часовой стрелке, вектор вращает звено ВС против часовой стрелки (см. рис. 3.7).
Аналогичным образом строится план ускорений. Разница заключается лишь в том, что относительные ускорения раскладываются на две составляющие: нормальную и касательную.
Дано: ускорения точек  ,
,  (рис. 3.8, а). Известны все скорости, т. к. план скоростей уже построен (см. рис. 3.7, б).
(рис. 3.8, а). Известны все скорости, т. к. план скоростей уже построен (см. рис. 3.7, б).
Определить: ускорения точек  ,
,  ,
,  ; угловые ускорения звеньев
; угловые ускорения звеньев  ,
,  .
.
Векторные уравнения для построения плана ускорений
 ;
;  (3.35)
(3.35)
Векторы ,  известны по величине и направлению. Величину векторов
известны по величине и направлению. Величину векторов  ,
,  можно определить, а направления их известны:
можно определить, а направления их известны:  ; (вектор направлен от точки В к точке А);
; (вектор направлен от точки В к точке А);
 (вектор направлен от точки В к точке С).
(вектор направлен от точки В к точке С).
Касательные составляющие относительных ускорений известны только по направлению:  ,
,  .
.
Таким образом, имеется два векторных уравнения с четырьмя неизвестными, решая которые, определяем абсолютное ускорение  .
.
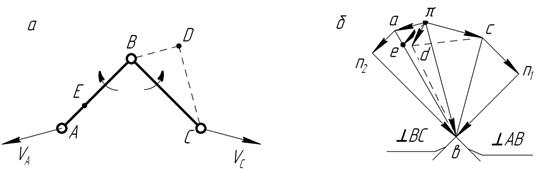
Рис. 3.8. Построение плана ускорений структурной группы 1-го вида
Из полюса  (рис. 3.8, б) откладывается в направлении вектора
(рис. 3.8, б) откладывается в направлении вектора 
отрезок произвольной длины  .
.
Определяем масштабный коэффициент плана ускорений
 .
.
С учетом масштаба строим все остальные векторы. Ускорение точки С — в виде отрезка 
 , вектор πс направлен параллельно аС .
, вектор πс направлен параллельно аС .
Из точек а и с откладываем в масштабе векторы  и
и  параллельно отрезкам АВ и ВС, соответственно.
параллельно отрезкам АВ и ВС, соответственно.
 ,
,  .
.
Через точки n и n1 проводим прямые, соответствующие направлениям касательных ускорений (через точку n — перпендикуляр к звену АВ, через точку n1 — перпендикуляр к звену ВС).
Точка пересечения этих двух прямых определяет ускорение точки В
Ускорения точек D и Е определяются по правилу подобия; для этого на отрезке bc, изображающем полное относительное ускорение  строится треугольник bdc подобный и сходственный с треугольником BDC. Находим ускорение точки D
строится треугольник bdc подобный и сходственный с треугольником BDC. Находим ускорение точки D
Из пропорционального деления отрезков определяют отрезок, изображающий ускорение точки Е:
 ,
,
а затем длину отрезка πе умножают на масштабный коэффициент
Величину и направления угловых ускорений находят по касательным составляющим относительных ускорений (см. рис. 3.8, б)
 ;
;  (3.36)
(3.36)
Направления угловых ускорений звеньев определяют, мысленно перенося векторы  и nb с плана ускорений в точку В. Первый вектор вращает звено ВС против часовой стрелки, второй вращает звено АВ по часовой стрелке. Направления угловых ускорений показаны круговыми стрелками (см. рис. 3.8,а).
и nb с плана ускорений в точку В. Первый вектор вращает звено ВС против часовой стрелки, второй вращает звено АВ по часовой стрелке. Направления угловых ускорений показаны круговыми стрелками (см. рис. 3.8,а).
Дата добавления: 2020-12-11; просмотров: 810;
Поиск по сайту
Узнать еще
- E) Расчет структурных составляющих очага деформации с одним нейтральным сечением
- I. Обвально-осыпная группа склонов.
- I. Определение и структура методов обучения.
- I. Определение условий выполнения рукописи.
- I. Определение, виды радиоактивности, радиоактивные семейства
- I. По функциональной группе
- I. Реакции подвижного водорода в группе ОН
- II группа ДТС, при которых вероятны столкновения с автомобилями, обладающими преимущественным правом проезда

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
