Группа Ассура 2-го вида
Построение планов скоростей и ускорений рассмотрим на примере кривошипно-ползунного механизма (рис. 3.9). Порядок построения, обозначения, формулы аналогичны рассмотренным выше, поэтому этот и последующий разделы даны в сокращенной форме, без повторения ранее изложенных правил.
Дано: кинематическая схема механизма; угловая скорость кривошипа  .
.
Определить: скорость и ускорение точки В; угловую скорость и угловое ускорение звена АВ.
Механизм образован присоединением к ведущему звену группы Ассура II класса 2-го вида. Выделим эту группу и построим для нее план скоростей (рис. 3.9, б). Скорость точки В определится уравнением:
Известны величина и направление скорости точки А
 ;
;  .
.
Известны также направления скоростей :  ;
;  .
.
Отрезок ра, изображающий скорость точки А на плане, выбираем произвольным по величине. Масштабный коэффициент  .
.
Через точку А проводим направление относительной скорости  ; через полюс проводим направление абсолютной скорости точки В — горизонтальную прямую, параллельную х — х.
; через полюс проводим направление абсолютной скорости точки В — горизонтальную прямую, параллельную х — х.
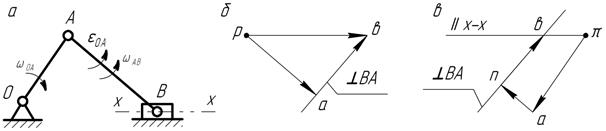
Рис. 3.9. Пример построения плана скоростей и ускорений структурной группы 2-го вида: а — план механизма; б — план скоростей; в — план ускорений
Определяем скорость точки В, измерив отрезок рb на плане и умножив его на масштабный коэффициент
 .
.
Угловая скорость звена АВ
 .
.
Вектор относительной скорости показывает, что звено АВ вращается против часовой стрелки (см. рис. 3.9).
План ускорений строим по уравнению:

где  , вектор направлен от точки А к центру вращения – точке О.
, вектор направлен от точки А к центру вращения – точке О.
 , вектор направлен от точки В к центру вращения – точке А.
, вектор направлен от точки В к центру вращения – точке А.
Вектор касательного ускорения  .
.
Векторабсолютного ускорения aB направлен параллельно x-x.
Точка пересечения направлений двух последних векторов определяет абсолютное ускорение, а также направление и величину касательного ускорения. На плане ускорений, построенном с учетом масштабного коэффициента  , правая часть уравнения изображена соответствующими векторами
, правая часть уравнения изображена соответствующими векторами  ,
,  ,
,  . Результирующий вектор
. Результирующий вектор  изображает абсолютное ускорение точки В.
изображает абсолютное ускорение точки В.
Угловое ускорение звена АВ находим по касательной составляющей

Направление углового ускорения находим, перенося вектор касательной составляющей ускорения в точку В механизма (см. рис. 3.9, в, а).
Дата добавления: 2020-12-11; просмотров: 921;
Поиск по сайту
Узнать еще
- I. Обвально-осыпная группа склонов.
- II группа ДТС, при которых вероятны столкновения с автомобилями, обладающими преимущественным правом проезда
- II. Дифференцированный подход к различным группам населения
- IX группа ДТС, в которых возможны происшествия из-за переутомления водителей
- Автоматическая ликвидация асинхронных режимов
- АГЕНТЫ С АКТИВНЫМИ ОТРИЦАТЕЛЬНЫМИ ПОЛЯРНЫМИ ГРУППАМИ
- Алгоритмы для расчета кинематики групп Ассура
- АНАЛІЗ ФІСКАЛЬНОЇ ПОЛІТИКИ ЗА ДОПОМОГОЮ МОДЕЛІ “ДОХОДИ-ВИДАТКИ”. ДИСКРЕЦІЙНА ТА АВТОМАТИЧНА ПОЛІТИКА. МУЛЬТИПЛІКАТОРИ ДЕРЖАВНИХ ЗАКУПІВЕЛЬ ТА ЧИСТИХ ПОДАТКІВ.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
