Последовательность графического интегрирования диаграмм
Графическое интегрирование кинематических диаграмм осуществляется в обратном порядке (рис. 3.13). Пусть задана диаграмма ускорений в виде плавной кривой.
1. Делим участок оси абсцисс на равные отрезки и заменяем кривую ступенчатым графиком, принимая точки a1,b1, …, f1, посередине отрезков времени (см. рис. 3.13, а).
2. Сносим точки a1, b1,…, f1 на ось ординат и соединяем полученные точки a΄, b΄, …, f΄, с полюсом (точкой Р), выбранным на произвольном расстоянии Н от начала координат.
3. В новой системе координат (см. рис. 3.13, б) принимаем точку а на оси ординат, имеющую координату S0.Это - постоянная интегрирования, которая определяется из начальных условий.
4. Проводим в пределах соответствующих интервалов времени (0—1, 1—2, ..., 5—6) хорды ab, bc, … , fg , параллельные лучам Pa΄, Pb΄, Pf΄.
Получаем график в виде ломаной линии, который заменяем плавной кривой. Масштабный коэффициент полученной диаграммы в соответствии с зависимостью (3.49) определяется по формуле:
 (3.51)
(3.51)
Отсюда получаем
 (3.52)
(3.52)
где μа - масштабный коэффициент диаграммы ускорений.
|
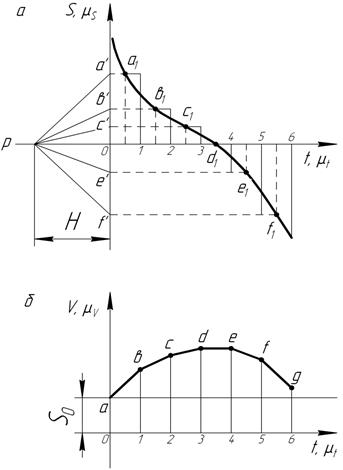
Рис. 3.13. Графическое интегрирование кинематических диаграмм
Вопросы для самоконтроля:
1. Что называется масштабным коэффициентом?
2. Сформулируйте принцип подобия в плане скоростей.
3. Сформулируйте принцип подобия в плане ускорений.
4. Что называется аналогом скорости?
5. Единицы измерения аналога скорости.
6. Связь истинной скорости с ее аналогом.
7. Что называется аналогом ускорения?
8. Единицы измерения аналога ускорения.
9. Аналог угловой скорости и углового ускорения.
ЗАКЛЮЧЕНИЕ
Изложенные в учебном пособии разделы посвящены общим методам исследования структуры и кинематики механизмов. Эти задачи позволяют выполнить анализ механизмов на основе изучения строения механизмов, исследования их движения с геометрической точки зрения.
Материал учебного пособия создает необходимую базу для решения многих технических задач. Знание основ теории механизмов позволяет студенту грамотно и творчески подойти к проектированию деталей машин и сборочных единиц, к решению задач оптимального управления машинами, механизмами и их элементами.
В процессе изучения курса студенты имеют возможность проверить свои знания, отвечая на вопросы для самоконтроля.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.- 4-е изд. – М.: Наука, 1988. – 640 с.
2. Эльяш Н.Н., Гурьев Е.С. Т еория механизмов и машин и детали машин: Учеб. пособие / Свердл. инж.-пед- ин-т. Свердловск. 1990. Ч 1. 96 с.
3. Эльяш Н.Н., Гурьев Е.С. Теория механизмов и машин и детали машин: Учеб. пособие / Свердл. инж.-пед- ин-т. Свердловск. 1991. Ч. 2. 80 с.
4. Теория механизмов и механика машин: Учеб. для вузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – 5-е изд., стереотип.- М.: Изд-во МГТУ им. Баумана, 2004. – 664 с.: ил.
5. Теория механизмов и машин. 3-е изд., испр. Коловский М.З., Евграфов А. Н., и др. Издательство: Academia , 2008. – 560 с.: ил
6. Теория механизмов и машин. Матвеев Ю.А., Матвеева Л.В.,
Матвеев Ю.А. Издательство: Альфа, 2009. – 320 с.
7. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Структурный анализ плоских механизмов». О.В. Бердюгина, 2017г. - 17 стр
8. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение плана положений механизма» О.В. Бердюгина, 2017г. - 11 стр .
9. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение планов скоростей» О.В. Бердюгина, 2017г. - 18стр
10. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение кинематических диаграмм» О.В. Бердюгина, 2017г. - 9стр
Дата добавления: 2020-12-11; просмотров: 896;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
