Аналоги скоростей и ускорений
Во многих случаях при проектировании машин и механизмов законы движения звеньев в функции времени можно определить только на последующих стадиях проектирования, обычно после динамического анализа с учетом приложенных сил [2, с. 61].
В таких случаях движение звеньев определяется в два этапа: сначала устанавливаются зависимости кинематических параметров в функции обобщенной координаты (угла поворота ведущего звена), а затем определяется закон изменения обобщенной координаты во времени. Для выполнения подобных расчетов вводятся понятия аналогов скоростей и ускорений.
Аналогом скорости какой-либо точки называется первая производная радиус-вектора этой точки по обобщенной координате. Для поступательного движения перемещение точки можно считать равным радиус-вектору. Тогда аналог скорости согласно определению
 (3.37)
(3.37)
где  - обобщенная координата (угол поворота звена 1);
- обобщенная координата (угол поворота звена 1);
 - перемещение точки i-ro звена.
- перемещение точки i-ro звена.
Скорость данной точки  , поэтому
, поэтому
 (3.38)
(3.38)
Учитывая формулу (3.37), получаем связь между истинной скоростью и ее аналогом:
 (3.39)
(3.39)
где  - угловая скорость начального звена.
- угловая скорость начального звена.
Физический смысл аналога скорости - это скорость той же точки при  ; единица измерения аналога скорости - метр.
; единица измерения аналога скорости - метр.
Аналогом ускорения точки называется вторая производная радиус-вектора точки по обобщенной координате.
Чтобы установить связь ускорения с аналогом ускорения продифференцируем (3.39) по времени
 (3.40)
(3.40)
Окончательно получим
 (3.41)
(3.41)
где  - ускорение точки i-го звена;
- ускорение точки i-го звена;
 - аналог ускорения той же точки;
- аналог ускорения той же точки;
 - угловое ускорение начального звена.
- угловое ускорение начального звена.
При вращательном движении звена вводятся понятия аналогов угловых скоростей и ускорений.
Аналогом угловой скорости называется первая производная от угла поворота по обобщенной координате механизма
 , (3.42)
, (3.42)
Где  - угол поворота i-го звена.
- угол поворота i-го звена.
Угловая скорость звена  связана с ее аналогом соотношением:
связана с ее аналогом соотношением:
 (3.43)
(3.43)
Аналогом углового ускорения называется вторая производная от угла поворота звена по обобщенной координате механизма. Дифференцируя (3.43) по времени, получим
 (3.44)
(3.44)
Из формул (3.43) и (3.44) видно, что аналоги угловых скоростей и угловых ускорений являются безразмерными величинами.
3.7. Графическое дифференцирование и интегрирование как
метод кинематического анализа
Графическое изображение изменения основных кинематических параметров механизма за полный цикл движения называется кинематической диаграммой.
Если одна из кинематических функций задана в форме графика или в виде таблицы значений, то найти производную или интеграл от этой функции непосредственно в аналитической форме невозможно. В этом случае используют методы графического дифференцирования и интегрирования.
Основное достоинство данного метода, как и у большинства графических методов, - это наглядность и простота; недостаток - невысокая точность по сравнению с аналитическими методами. Метод основан на геометрическом смысле производной, которая представляет собой тангенс угла наклона касательной в данной точке кривой к оси абсцисс.
Обычно кривую заменяют ломаной линией и принимают следующее допущение: угол наклона касательных в точках, расположенных посередине каждого участка кривой, равен углу наклона соответствующей хорды. Это вносит некоторую погрешность, но она не суммируется, что обеспечивает приемлемую точность метода [2, с. 110].
На рис. 3.11 изображена кинематическая диаграмма перемещений точки в масштабе. Пусть за бесконечно малый промежуток времени Δtперемещение точки увеличилось на ΔS.Тогда скорость точки на этом участке определится из выражения
 (3.45)
(3.45)
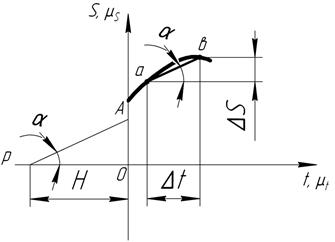
Рис. 3.11. К определению кинематических параметров методом кинематических диаграмм.
Из чертежа (см. рис. 3.11) следует, что ΔS/Δt=tgα , а с учетом принятого допущения это и есть первая производная (в пределе хорда превратится в касательную). Поэтому
 (3.46)
(3.46)
Проведем из точки Р, расположенной влево от оси абсцисс на произвольном расстоянии Н, прямую, параллельную хорде ab, до пересечения с осью ординат. Эта прямая отсекает на оси ординат отрезок ОА, длина которого определяется из треугольника АОР
 (3.47)
(3.47)
Разделив (3.46) на (3.47), получим
 (3.48)
(3.48)
Правая часть уравнения содержит только постоянные величины, следовательно, она является также величиной постоянной и представляет собой масштабный коэффициент скорости.
 (3.49)
(3.49)
Таким образом, отрезок ОА, отсекаемый лучом РА на оси ординат, изображает скорость на бесконечно малом участке Δt в масштабе скоростей μV.
 3.8. Метод кинематических диаграмм
3.8. Метод кинематических диаграмм
Дата добавления: 2020-12-11; просмотров: 3153;
Поиск по сайту
Узнать еще
- Аналоги решения задачи повышения БФС
- Аналогии между лабораторным и вычислительным экспериментами
- Аналогично осуществляется включение перегружателя и конвейера при нажатии кнопок «ПЕРЕГРУЖАТЕЛЬ» и «КОНВЕЙЕР» соответственно.
- Аналогично преобразуем и уравнение движения
- Аналогия закона и права
- Аналогия и разница между активной и реактивной мощностью в одной цепи.
- Аналогия между электрическим полем в проводящей среде и электростатическим полем

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
