Кинематическая цепь. Структурная формула кинематической цепи.
Структура механизма определяется его кинематической цепью. Кинематическая цепь — это система звеньев, образующих между собой кинематические пары. Кинематические цепи различают но следующим признакам (рис. 1.3):
а) замкнутые и незамкнутые;
б) простые и сложные;
в) плоские и пространственные.
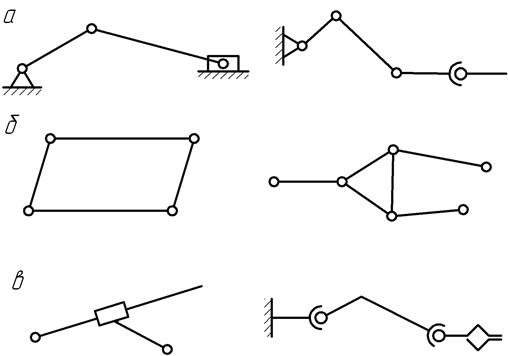
Рис. 1.3. Классификация кинематических цепей
В замкнутой цепи каждое звено входит не менее чем в две кинематические пары; в незамкнутой цепи есть звенья, входящие только в одну кинематическую пару.
В простой цепи каждое звено входит не более чем в две кинематические пары; в сложной цепи есть звенья, входящие более чем в две кинематические пары.
В плоской цепи все звенья перемещаются в одной, плоскости, либо в параллельных плоскостях; в пространственной - звенья движутся в разных, непараллельных плоскостях.
Кинематическая цепь характеризуется числом степеней свободы, равным числу входных звеньев.
Пусть в механизме имеется n подвижныхзвеньев. Каждое звено до соединения его с другим звеном имеет в пространстве 6 степеней свободы. Тогда общее число степеней свободы кинематической цепи равно 6n.
Соединение звеньев в кинематические пары накладывает определенное число связей, которые надо исключить из общего числа степеней свободы.
Учитывая, что каждая пара 5-го класса накладывает 5 связей, пара 4-го класса — 4 связи и т. д., число степеней свободы механизма относительно стойки (неподвижного звена) определится по формуле:
 (1.1)
(1.1)
 — число кинематических пар 5-го, 4-го... 1-го класса.
— число кинематических пар 5-го, 4-го... 1-го класса.
Полученная формула называется структурной формулой кинематической цепи и носит имя А. П. Малышева.
Все механизмы классифицируются по семействам. Класс семейства определяется числом общих связей, наложенных на механизм. Если наложить на механизм одну общую связь, то получим механизм 1-го семейства, и формула (1.3) примет вид
 (1.2)
(1.2)
Аналогично, если наложить 2 общие связи
 (1.3)
(1.3)
Если наложить 3 общие связи, получим механизм 3-го семейства - плоский механизм. Из определения плоских механизмов следует, что у них из шести независимых движений (см. рис. 1.1) возможны только три: поступательное вдоль осей x и y, а также вращение относительно оси Z. При этом звенья будут двигаться в плоскости xОy.
Структурная формула кинематической цепи в этом случае принимает вид
 (1.4)
(1.4)
и называется формулой Чебышева для плоских механизмов.
Дата добавления: 2020-12-11; просмотров: 1252;
Поиск по сайту
Узнать еще
- Абсолютна адресація клітинок у формулах
- Абсорбция сухих газов. Формула Кремсера
- Аналогия и разница между активной и реактивной мощностью в одной цепи.
- Б) Примеры расчета магнитной цепи.
- Буксирный трос; 2 – якорная скоба; 3 – удлиненное звено; 4 – якорная цепь; 5 – скоба; 6 – стальной трос (свистов); 7 – стопора якорной цепи.
- Вектори кутової швидкості і кутового прискорення. Формула Ейлера
- Вероятностно-структурная модель системы
- Вероятность гипотез. Формула Байеса

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
