Замена высших кинематических пар низшими
В плоских механизмах все пары 4-го класса являются высшими, а пары
5-го класса - низшими. Поэтому формулу Чебышева можно представить в виде:
 (1.5)
(1.5)
n — число подвижных звеньев;
pн— число низших кинематических пар;
pв — число высших кинематических пар.
При структурном анализе плоских механизмов высшие пары можно заменить низшими. Рассматривать механизмы с низшими парами удобнее, т. к. для них решены все основные задачи анализа механизмов.
При замене высших пар на низшие должны выполняться следующие условия:
1) степень подвижности механизма должна оставаться неизменной;
2) относительное движение звеньев также должно сохраняться.
Пусть для кинематической цепи, содержащей высшие и низшие кинематические пары, степень подвижности равна Wo.
Если убрать из кинематической цепи пару 4-го класса, то число степеней свободы станет на единицу больше, т. к. пара 4-го класса в плоском механизме накладывает одну связь (три общих связи уже наложено).
Вместо отброшенной пары необходимо приложить кинематическую цепь, содержащую только низшие пары.
Тогда, чтобы выполнить 1-е условие, необходимо соблюсти равенство:
 (1.6)
(1.6)
W0- степень подвижности исходной цепи;
(W0 + 1) - степень подвижности цепи с отброшенной высшей
парой;
(3n – 2 p5) - степень подвижности цепи замены (содержащей только низшие пары).
Преобразуем равенство (1.6)
 (1.7)
(1.7)
Полученное выражение устанавливает соотношение между числом звеньев и числом кинематических пар 5-го класса в цепи замены.
Учитывая, что p5 и n - целые числа, определяется минимальное число звеньев и кинематических пар в цепи замены:

Вывод: высшую пару в кинематической цепи можно заменить дополнительным звеном и двумя низшими парами.
Пример. Имеется механизм, состоящий из звеньев 1 и 2 (рис.1.4).Контакт между звеньями - в точке, которая представляет собой высшую пару; А и В - низшие пары (вращательные); О1и О2 — центры кривизны звеньев.
Для замены высшей кинематической пары (рис. 1.4, а) проводим нормаль в точке касания звеньев до центров кривизны О1и О2 (пунктирная линия). Соединяя точки О1и О2 с точками А и В, получим шарнирный четырехзвенник, у которого все пары низшие. Таким образом, высшую пару (точку касания звеньев) заменили дополнительным звеном 3и двумя низшими парами О1и О2 (рис. 1.4, б).
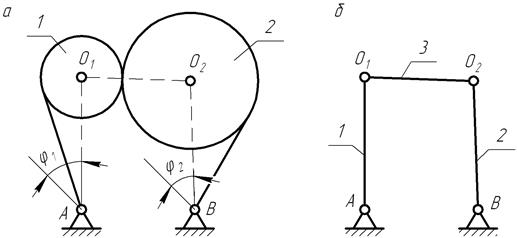
Рис 1.4. Замена высшей пары на низшие.
Следует иметь в виду, что заменяющий механизм имеет такой вид только для данного положения. Для каждого нового положения длина звеньев и их взаимное расположение могут быть иными.
Определим степень подвижности исходного механизма

Степень подвижности заменяющего механизма

Сравнивая результаты, делаем вывод, что первое условие замены выполняется. Кроме того, если звено 1 повернуть на угол φ1,то звено 2 повернется на соответствующий угол φ2,т.е. второе условие также выполняется.
Сформулируем общие правила замены высших кинематических пар низшими:
1. Если высшие пары представляют собой соприкасающиеся окружности, то при замене низшие пары находятся в центре этих окружностей.
2. Если высшие пары представляют собой окружность или любую произвольную кривую, с одной стороны, и точечный контакт, с другой стороны, то кинематические пары замены находятся в точке контакта и в центре кривизны (рис. 1.5, а).
3. Если контакт в высшей паре происходит по линии, то замена осуществляется поступательной парой (рис. 1.5, б).
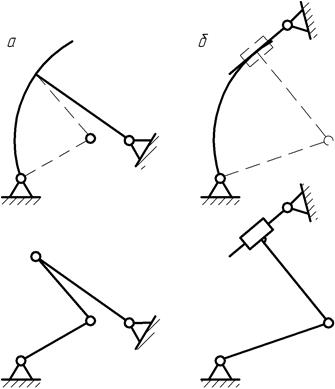
Рис. 1.5. Варианты замены высших кинематических пар низшими.
Последние два вывода представляют собой частные случаи:
- для точечного контакта радиус кривизны равен нулю (вращательная пара совпадает с точкой контакта);
- для прямой линии радиус кривизны равен бесконечности, т. е. в цепи замены движение должно осуществляться по прямой, а не по окружности (поступательная пара).
Дата добавления: 2020-12-11; просмотров: 1219;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- II. Психологические приемы влияния на партнера.
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.
- IS- диаграмма водяного пара.
- Is-диаграмма водяного пара
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- J Парадигмы (А. Ф. Бондаренко)
- RD «Экзаменационная ведомость»

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
