Кинематические пары, их классификация
ОБЩИЕ СВЕДЕНИЯ О СТРОЕНИИ МЕХАНИЗМОВ
Основные понятия и определения
Машиной называется устройство, предназначенное для преобразования энергии, материалов или информации с целью облегчения или исключения труда человека. Соответственно, машины бывают энергетические, технологические и транспортные, информационные.
Механизмом называется система твердых тел, служащих для преобразования одних видов движения в другие.
В настоящее время известно 8 видов механизмов, которые классифицируются по принципу передачи движения:
1) плоские механизмы, у которых движение всех точек происходит в одной плоскости или в параллельных плоскостях;
2) пространственные механизмы, у которых движение точек происходит в разных плоскостях (пересекающихся);
3) кулачковые механизмы, в состав которых входит кулачок — звено переменного профиля;
4) зубчатые механизмы, у которых движение передается по взаимоогибаемым кривым. Эти механизмы могут быть как плоскими, так и пространственными;
5) фрикционные механизмы, у которых движение передается за счет сил трения (фрикционные муфты, вариаторы);
6) механизмы с гибкими связями, у которых движение передается с помощью ремней, цепей, канатов на большие расстояния;
7) волновая передача, которая основана на деформации звеньев (диафрагмы или гибкого колеса);
8) гидравлические или пневматические механизмы, в которых преобразование движения твердых тел происходит посредством жидкости или газа. Жидкости или газы не считаются звеньями, новходят в состав механизма.
Все механизмы состоят из звеньев, которые представляют собой одну деталь, либо несколько неподвижно соединенных между собой деталей. В свою очередь звенья бывают подвижными или неподвижными. Неподвижное звено называют стойкой. За стойку принимают основание, раму, корпус, фундамент и все, что с ними неподвижно связано. Стойка в механизме только одна.
Подвижные звенья бывают входные (ведущие) и выходные (ведомые). Входным называют звено, к которому приложено движение извне, а выходным – звено, которое совершает требуемое движение, для выполнения которого служит данный механизм. Поверхности, линии, точки звена, по которым оно соприкасается с другим звеном, называют элементами звена [1, с. 18-21].
Кинематические пары, их классификация
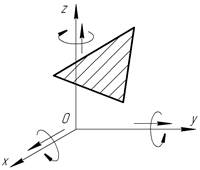
Рис. 1.1. Возможные движения в пространстве звена, не связанного
кинематической парой с другим звеном.
Подвижные звенья соединяются между собой либо со стойкой; при этом на движение накладывается определенное количество связей (ограничений движению). Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
Как известно, любое звено, не связанное с другим звеном, в пространстве имеет шесть степеней свободы (шесть независимых движений), показанных на рисунке 1.1.
Если соединить два звена между собой, то, в зависимости от вида соединения, может быть ограничено 1, 2, 3, 4 или 5 движений. Если ограничить все 6 движений, то получим одно неподвижное звено, и кинематическая пара перестанет существовать. Если звенья не соприкасаются, то кинематической пары также не существует, а есть только свободные звенья.
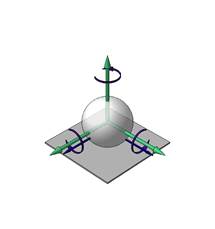
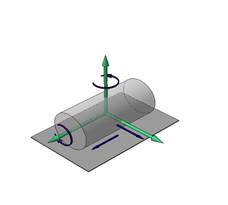
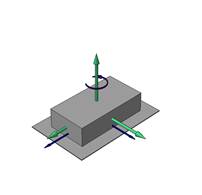
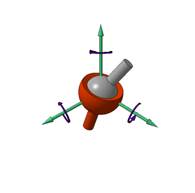

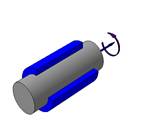
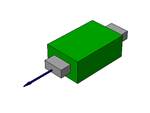


Рис 1.2. Примеры кинематических пар 1-го, 2-го, 3-го, 4-го, 5-го классов.
|
 |
Таблица 1. Классификация кинематических пар.
Продолжение табл. 1
 |
 |
Таким образом, для существования кинематической пары необходимы три условия:
- наличие двух звеньев;
- контакт между звеньями;
- возможность относительного движения звеньев.
Очевидно, что количество связей (S), накладываемых при соединении звеньев кинематической парой, изменяется в пределах: 1 £ S £ 5. Соответственно, существует 5 классов кинематических пар, и класс кинематической пары определяется числом наложенных связей, например, пара 5-го класса накладывает 5 связей и из шести возможных движений остается только одно: вращательное или поступательное относительно какой-либо оси; пара 4-го класса накладывает 4 связи, оставляя возможными только два независимых движения и т. д. Примеры кинематических пар 1-го, 2-го, … 5-го классов приведены на рисунке 1.2, а соответствующая классификация их и обозначения – в таблице 1.
Кроме классификации по числу наложенных связей кинематические пары делят на высшие и низшие, в зависимости от элементов соприкасания звеньев: если контакт между звеньями осуществляется по точкам или по линиям, то кинематические пары относятся к высшим; если звенья кинематической пары контактируют по поверхности, то такие пары относятся к низшим.
Дата добавления: 2020-12-11; просмотров: 851;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- VI.2. Классификация месторождений нефти и газа
- VI.III. VI. Генетическая классификация складок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
