Условие захвата валками переднего конца полосы
При прокатке толстых заготовок, слябов, слитков, блюмов и т.п. может возникнуть ситуация, когда передний конец полосы, вступив в контакт с валками, не захватывается их бочками, в результате чего процесс прокатки не может начаться. Чтобы этого не произошло, необходимо выполнить условие захвата валками переднего конца полосы.
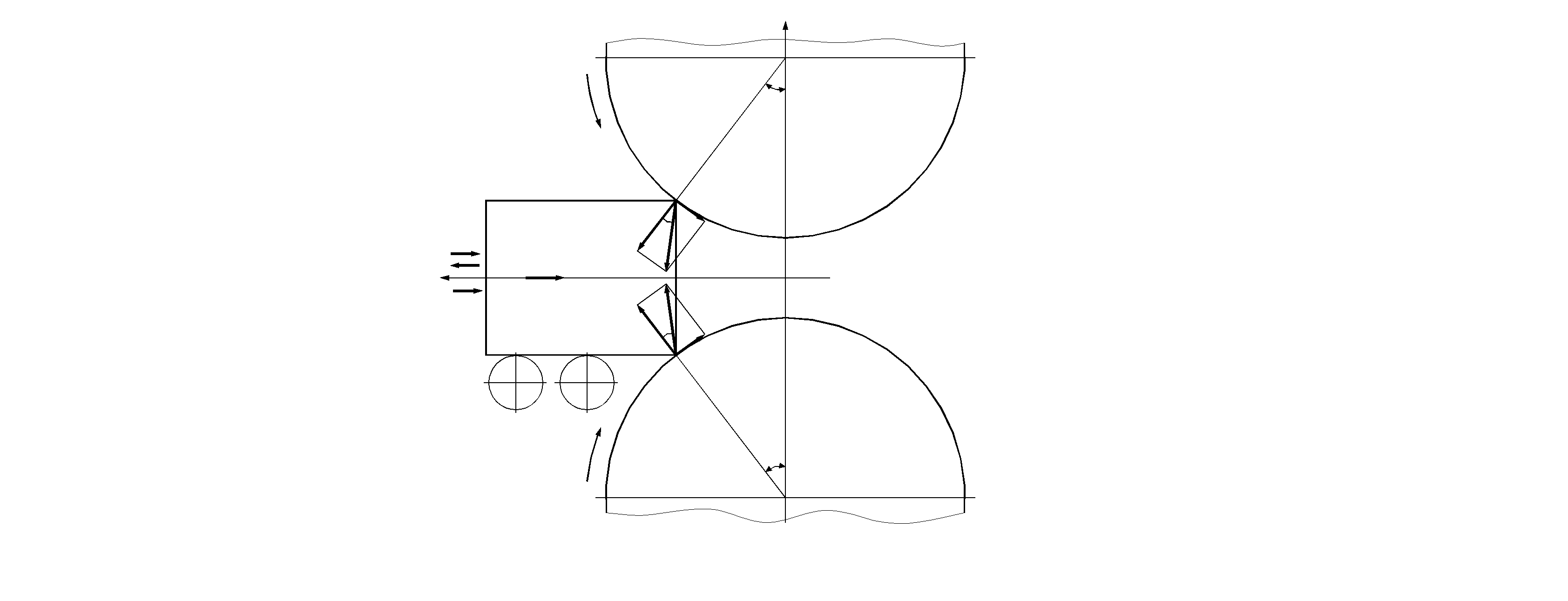
На рис. 4.1 показаны силы, действующие на полосу в момент, когда её передний конец подошел к валкам и своими передними ребрами вступил в контакт с бочками валков (на схеме проекции линии контакта показаны в виде точек А).
| y |
| α |
| α |
| υв |
| υв |
| U |
| x |
| M |
| υ0 |
| β |
| β |
| A |
| A |
| T |
| T |
| N |
| N |
| R |
| R |
Рис. 4.1. Расчетная схема для условия захвата валками переднего конца полосы
(α – угол захвата, υв – окружная скорость бочки валков, υ0 – скорость полосы перед
входом в очаг деформации).
По линиям контакта полосы с валками на полосу со стороны каждого из валков действует сила R, направленная под некоторым углом b к нормали к поверхности бочки, причем величина b заранее не известна.
Силу R можно разложить на две составляющие: нормальную N, направленную по нормали, являющейся продолжением радиуса бочки, и касательную T, направленную по касательной к поверхности бочки.
По физическому смыслу T – это сила трения, действующая на передний конец полосы со стороны валка, поэтому она связана с силой N известным из физики законом трения (законом Амонтона):
 , (4.1)
, (4.1)
где  – коэффициент трения между ребром полосы А и поверхностностью бочки в момент захвата.
– коэффициент трения между ребром полосы А и поверхностностью бочки в момент захвата.
В то же время из схемы видно, что
 . (4.2)
. (4.2)
Сопоставив (4.1) и (4.2), видим, что:
 = . (4.3)
= . (4.3)
Поэтому угол b называют углом трения.
Кроме сил со стороны валков, на полосу могут действовать и другие внешние силы:
· сила подпора М, создаваемая рольгангом стана или специальным манипулятором;
· инерционная сила U, которая возникает, если полоса подошла к валкам с скоростью uо, не равной скорости uв. Например, если uо > uв, то полоса, вступив в контакт с валками, тормозится, и инерционная сила U направлена вперёд:
 т.к. ось х принято направлять навстречу направлению прокатки
т.к. ось х принято направлять навстречу направлению прокатки
где mп – масса полосы;
a𝔷 – отрицательное ускорение (замедление при торможении).
Если uо < uв, то валки при захвате ускоряют полосу и инерционная сила U направлена назад:
U = mп∙aр
где aр – ускорение при разгоне.
Чтобы захват произошел, необходимо, чтобы равнодействующая всех сил, действующих на полосу, была направлена вперед по ходу прокатки. Это и есть условие захвата валками переднего конца полосы:
 (4.4)
(4.4)
где  проекции всех сил на ось х.
проекции всех сил на ось х.
Спроектировав силы N, T, M, U на ось х, получили:
 . (4.5)
. (4.5)
Преобразуем неравенство (4.5):
 (4.6)
(4.6)
или:
 . (4.7)
. (4.7)
Выражение (4.7) представляет собой условие захвата полосы валками в общем виде. Смысл его состоит в том, что коэффициент трения при захвате, или тангенс угла трения, должен быть больше, чем величина в правой части неравенства.
Частный случай условия (4.7):
М=U=0.
Тогда из выражения (4.7) получим:
 (4.8)
(4.8)
или: b > a,
Следовательно, чтобы захват произошел при отсутствии сил инерции и подпора, угол захвата должен быть меньше угла трения. Если условия (4.7) и (4.8) не выполняются, то указанные выражения показывают пути обеспечения захвата: уменьшение угла захвата (величины a), придание валкам большей шероховатости (т.е. увеличение  и b), увеличение скорости подката uо (т.е. использование силы инерции U), увеличение силы подпора М.
и b), увеличение скорости подката uо (т.е. использование силы инерции U), увеличение силы подпора М.
Дата добавления: 2019-02-08; просмотров: 1510;
Поиск по сайту
Узнать еще
- IX. Русское кино конца прошлого столетия
- PCI является стандартной шиной для подключения периферийных устройств. Среди них можно отметить сетевые карты, модемы, звуковые карты и платы захвата видео.
- Агрегирование полосы пропускания
- Архитектура конца XX - начала XXI века.
- Архитектура стран мира второй половины ХХ – конца ХХ века
- Взгляды исследователей конца XIX – начала ХХ в. на познавательную деятельность детей недоразвитием речи
- Виды колебательных (поперечных) движений конца электрода.
- Влияние сопротивления деформации материала полосы на контактные напряжения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
