Непосредственное управление процессами
Если процесс осуществляется, например, в биореакторе, то часто возникает необходимость в регулировании рН, температуры, скорости аэрации и перемешивания, иногда также парциального давления растворенного кислорода с тем, чтобы величины этих параметров соответствовали заданным значениям. Поскольку все эти параметры можно определять в ходе процесса постоянно, в реальном масштабе времени, то для регулирования каждого из них можно использовать обычный регулятор с обратной связью, основные элементы которого изображены на рис. 20. Здесь измеряется регулируемый или выходной параметр, например рН, и сигнал анализатора вводится в регулирующее устройство, в котором величина измеренного сигнала сравнивается с заданной или необходимой величиной. Далее по найденному отклонению между измеренной и заданной величинами с помощью того или иного алгоритма регулируется собственно параметр процесса.
Регулирование может выполнять и оператор, наблюдающий за показаниями прибора и в зависимости от этих показаний принимающий конкретное решение. Чаще, однако, регулирование осуществляется пневматическим или электронным устройством или цифровой ЭВМ. Простейшим типом управления является двухпозиционное регулирование (регулирование по принципу «включено — выключено»). В этом случае исполнительный механизм включается, когда разность между измеренной и заданной величинами превышает установленный предел, и выключается, когда она становится ниже другого установленного предела, или наоборот.
РИС. 20. Основные элементы системы управления с обратной связью.
Такой тип регулирования применяют тогда, когда блок управления или регулирующее устройство, непосредственно воздействующее на процесс с целью корректирования того или иного параметра, также являются двухпозиционными, как, например, в случае односкоростных насосов. При регулировании рН по принципу двухпозиционного управления насос, подающий основание в биореактор, включается при снижении рН ниже заданного значения на определенную величину (обычно 0,25 единицы рН). Если же рН становится выше заданного значения на 0,25 единицы, то насос выключается. (В последнем случае можно подключить насос, подающий в систему кислоту, но обычно в этом нет необходимости, поскольку в ходе большинства микробиологических процессов рН среды понижается.) Таким же способом обычно регулируют температуру (по крайней мере, в небольших реакторах).
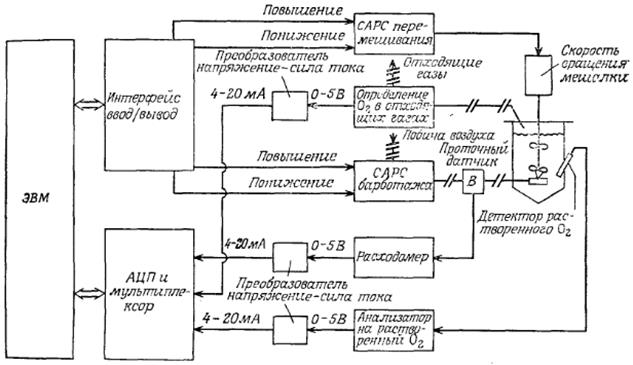
РИС. 21. Автоматическая система управления концентрацией растворенного кислорода, базирующаяся на определении состава отходящих газов н концентрации растворенного кислорода. (САРС — система автоматического регулирования скорости). [Воспроизведено с разрешения из работы: Таппеп L. Р., Nyiri L. К-, Instrumentation of Fermentation Systems, in Microbial Technology, Peppier H. J., Perlman D. (eds.), 2d ed., vol. II, p. 331, Academic Press, Inc., New York, 1979.]
Хорошо настроенный регулятор этого типа часто обеспечивает очень хорошее управление измеряемой переменной. Напротив, плохо настроенный регулятор может дестабилизировать систему, вызывая нежелательные сильные флуктуации. Настройке пропорционально-дифференциально-интегральных регуляторов посвящено множество учебных пособий и руководств по регулированию процессов.
Обычно в управлении процессом участвует несколько регуляторов этого типа, один из которых по данным измерения температуры регулирует скорость охлаждения, другой регулирует рН и т. д. В связи с постоянным удешевлением цифровых ЭВМ В последние годы управление несколькими регулирующими один параметр цепями обратной связи успешно осуществляется с помощью одной микро-ЭВМ. Если выходной сигнал ЭВМ (обычно после цифро-аналогового преобразователя или реле) используется непосредственно для включения исполнительного механизма, то такую систему называют системой с прямым цифровым управлением.
Преимуществом регулирующих устройств на основе ЭВМ является возможность сочетания способности компьютера к анализу данных с управлением процессом на базе определения нескольких параметров. В качестве примера на рис. 21 изображена схема одной из таких систем, в которой измерение концентрации растворенного кислорода и концентрации кислорода в отходящих газах позволяет определять в реальном масштабе времени величину kla; полученную таким путем информацию вместе с результатами определения концентрации растворенного кислорода можно использовать для соответствующего регулирования скорости вращения мешалки и (или) скорости поступающего в реактор потока газа с тем, чтобы концентрация О2 в растворе поддерживалась на необходимом уровне. Эта система относится к типу систем с прямым цифровым управлением. Обратите внимание на то, что здесь аналогоцифровой преобразователь принимает сигнал в виде изменяющейся силы тока, что вызывает необходимость преобразовывать сигнал напряжения в сигнал силы тока. Чтобы избежать существенных потерь в линии передачи сигнала, если только они не слишком короткие (как это бывает, например, в лабораторных установках), электрические аналоговые сигналы лучше передавать в виде силы тока.
Дата добавления: 2020-10-01; просмотров: 755;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- IV. 7. Управление состоянием окружающей среды на локальном уровне
- IX.2. Биотическое управление экосферой и роль деятельности человека
- Аварийное управление мощностью турбин электростанций
- АВАРИЙНОЕ УПРАВЛЕНИЕ ПС ОДНОЙ СЕКЦИИ.
- Автомаическое управление машинами циклического действия
- Автоматизация управления процессами производства синтетического каучука
- Автоматические системы с комбинированным управлением

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
