Управление машинами. Объекты и механизмы управления
Объекты и механизмы управленния. Устройства управления позволяют машинисту или оператору направлять и регулировать работу машины. При этом он совершает механические движения в соответствии с логической программой действий. Если эта программа неизменна, периодически повторяется или непосредственно связана с теми или иными действиями машины, она может быть выполнена без участия человека, или автоматически.
Если управление частично производится автоматами, но решающая роль в определении всего хода действий или основные операции остаются за человеком, управление называют автоматизированным. Если самодействующее устройство работает циклически и для возобновления каждого нового цикла необходимо вмешательство человека, его относят к полуавтоматическим.
Полуавтоматически обычно функционируют различные контрольные и предохранительные устройства. В строительных машинах обычно управляют двигателем, установкой рабочего оборудования, сцепными муфтами и тормозами, обеспечивающими нужные движения рабочего органа, движение всей машины.
Управление двигателем состоит в пуске, остановке и регулировании скорости.
В машинах с электрическими двигателями управление нередко сводится только к включению или выключению электрического питания, что имеет место в дробилках, грохотах, вентиляторах, моторном инструменте и т. д. Перемена хода (реверсирование) тоже может быть достигнута электрическим способом (сменой фаз).
Двигатели внутреннего сгорания работают иногда при постоянной частоте вращения, например, когда они используются в приводах электростанций, компрессоров, бетоносмесительных агрегатов и т. д. Частоту вращения подбирают так, чтобы двигатель обеспечивал наиболее экономичный режим. Это связано с тем, что расход топлива на единицу мощности (удельный расход) становится минимальным при определенной частоте вращения, которую называют номинальной.
Мощность двигателя на этой частоте вращения тоже называют номинальной.
В транспортных машинах частота вращения вала двигателя внутреннего сгорания регулируется водителем в широких пределах, за счет чего происходит изменение скорости движения на каждой из передач. Это достигается изменением количества подаваемой в цилиндры горючей смеси. Управление двигателем обычно не требует от человека больших физических усилий. Запуск производят от аккумуляторной батареи с помощью стартерного двигателя, остановку — прекращением подачи горючей смеси или выключением электрического зажигания.
Ручное и ножное управление машиной применимо лишь в тех случаях, когда усилия и частота операций переключения не вызывают чрезмерного напряжения человека. Для перемещения тяжелого рабочего оборудования в процессе установки или работы используют энергию двигателя. При этом применяются механическая, канатно-блочная, гидравлическая, пневматическая, электрическая, электропневматическая и другие системы управления.
Механические редукторные системы (рис. 2.64, а) используют в тех случаях, когда для перемещения управляемого органа необходимо вращательное движение. При этом к валу отбора мощности подключают соответствующий редуктор, от которого вращение передается нужному органу. Такие системы применяют на автогрейдерах и некоторых других машинах. Если для управления необходимо поступательное перемещение со значительным ходом, применяют канатно-блочное или гидравлическое управление.
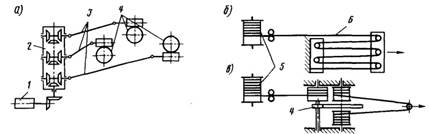
Рис. 2.64. Схемы управления механизмами: а — редукторное; б — канатно-полиспастное; в — канатно-зубчатое; 1 — двигатель; 2—распределительная коробка; 3 — карданные валы; 4 — приводные редукторы; 5 — главная лебедка; 6— полиспаст
Эти системы распространены в прицепных и навесных агрегатах, т. е. служат для установки отвалов бульдозеров, скреперных ковшей, рыхлительных зубьев и т. д. Канатно-блочные системы (рис. 2.64, б, в) обычно имеют одностороннее действие, например, поднимают рабочий орган при наматывании каната на барабан лебедки. Опускается он под действием собственного веса при сматывании каната.
Связь между лебедкой и приводным механизмом осуществляется через полиспаст, реже встречаются системы механического управления с промежуточными зубчатыми передачами. В последние годы канатно-блочные системы управления вытесняются гидравлическими системами, работающими по гидростатическому принципу.
Это обусловлено высокой надежностью гидропривода, легкостью включения и выключения, состоящего только в перепуске рабочей жидкости, возможностью реализации больших и притом двусторонних усилий, простотой оснащения устройствами автоматики и другими преимуществами.
Управление муфтами и тормозами с помощью ручных рычагов и педалей применяют в настоящее время главным образом в тех машинах, где оно не составляет основной части управленческих операций или допустимо по величине физических усилий и характеру работы. При управлении некоторыми машинами физическое усилие человека увеличивается с помощью гидравлических устройств.
В таких устройствах, называемых безнасосными (рис. 2.65, а) системами, человек, нажимая на педаль, передает усилие малому поршню гидравлических сообщающихся цилиндров и получает на большом поршне увеличенное усилие, действующее на тормозные тяги или рычаг муфты сцепления. Такие системы широко применяют в тормозах автомобилей и других машин.
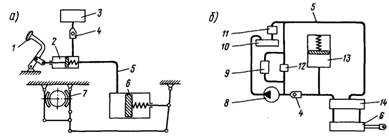
Рис. 2.65. Гидравлическое управление: а — безнасосное; б — насосное; 1 — педаль тормоза; 2 — цилиндр-датчик; 3 — бачок; 4 — обратный клапан; 5 — трубопровод; 6 — рабочий цилиндр; 7 —колодочный тормоз; 8 — масляный насос; 9 — автоматический клапан-пилот; 10 — масляный резервуар; 11 — фильтр очистки; 12 — предохранительный клапан; 13 — аккумулятор; 14 — распределитель
В безнасосных системах температура рабочей жидкости практически не отличается от температуры окружающего воздуха, в зимнее время может быть достаточно низкой, отчего жидкость загустевает. Во избежание этого применяют особые смеси жидкостей (например, смесь равных объемов глицерина и этилового спирта), называемые тормозными жидкостями.
В насосных гидросистемах (рис. 2.65, б) рабочая жидкость находится в непрерывном движении, так как подключенный к основному двигателю насос 8 работает постоянно. Поскольку жидкость находится в разогретом состоянии, она менее подвержена загустеванию при низких температурах. В питающий маслопровод жидкость подается под давлением и по нему поступает одновременно к распределителю и аккумулятору.
Если в данный момент жидкость не используется для привода механизмов управления, она поступает в аккумулятор и перемещает в нем подпружиненный поршень. Если при достижении рабочего давления в питающем маслопроводе жидкость не потребляется, то включается автоматический клапан-пилот, а жидкость, минуя насос, поступает обратно в масляный бак.
Система при этом удерживается под давлением благодаря наличию аккумулятора и устройству клапана-пилота; он стравливает излишки жидкости, не допуская снижения давления на напорной стороне системы. Действие насосной гидросистемы состоит в подключении к ней через распределитель того или иного гидроцилиндра. Отработавшая жидкость по безнапорному маслопроводу возвращается в масляный бак.
Пневматические системы управления обладают рядом преимуществ перед гидравлическими в тех случаях, когда существенны быстродействие и плавность передачи усилий, а также можно обойтись их относительно небольшой величиной. В противном случае при гораздо менее высоком давлении воздуха в сравнении с давлением жидкости воздухопроводы и рабочие цилиндры должны иметь слишком большие размеры и массу.
Рабочим механизмом системы пневмоуправления (рис. 2.66) является цилиндр с поршнем, или пневмокамера. Движение штока передается на соответствующий рычаг. Подобным образом приводят в действие тормозные устройства тяжелых автомобилей, тормоза и фрикционы экскаваторов и других машин.
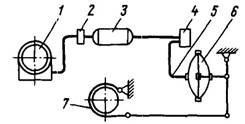
Рис. 2.66. Пневматическое управление: 1 — компрессор; 2 — воздухомаслоотделитель; 3 — ресивер; 4 — распределитель; 5 — воздухопровод; 6 — пневмокамера. 7 — ленточный тормоз
Существуют также и другие виды рабочих пневматических устройств, например, получающие все более широкое распространение пневмокамерные сцепные муфты в экскаваторах.
В управлении движением всей машины необходимо выделить рассмотренные выше переключение передач и рулевое управление, обеспечивающее направленное движение машин. Рулевое управлении воздействует на направляющие колеса или механизм поворота частей корпуса машины.
В небольших и сравнительно легких машинах применяют механическое рулевое управление, использующее мускульную силу водителя; в больших и тяжелых машинах — механизмы с гидроусилением и насосные гидросистемы. Последние реализуют большие усилия, но при этом теряется чувствительность управления, т. е. водитель не ощущает непосредственно сопротивления повороту в зависимости от условий движения.
Дата добавления: 2023-02-24; просмотров: 1472;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
