Управление вентиляционной установкой
Во многих технологических процессах для создания воздушного потока используются вентиляционные установки, позволяющие поддерживать постоянные значения скорости воздушного потока при изменяющихся значениях его поперечного сечения, температуры и давления воздуха. Задачи управления этими установками, как правило, решаются с помощью аналоговых астатических регуляторов.
Однако область их применения ограничена трудностью конструирования задатчиков параметра с точностью выше 1% даже при наличии прецизионных источников питания, прецизионных резисторов и идеальных ключей; значительной нелинейностью характеристик используемых датчиков, а также тем, что значение основного регулируемого параметра не считывается непосредственно с прибора, а вычисляется по промежуточному параметру.
Если в контур управления вентиляционной установкой с двумя мощными вентиляторами для создания стабильного воздушного потока ввести цифровую вычислительную машину, то будут обеспечены съем с измерительной или задающей аппаратуры значений регулируемых параметров, вычисление управляющих воздействий и выдача их на аппаратуру управления, контроль за работой технологического оборудования, индикация регулируемых параметров, анализ аварийных ситуаций и принятие соответствующих решений.
Управляющая ЭВМ, выполняющая все эти функции, должна быть надежной, недорогой, простой в эксплуатации, с программой в постоянной памяти. Этим требованиям удовлетворяет микро-ЭВМ "Электроника С5-11". Она обладает развитой системой команд, необходимыми возможностями по вводу- выводу, но имеет невысокое быстродействие и небольшую память (объем ОЗУ 256 байт, объем ПЗУ 2К).
Поскольку алгоритм управления предусматривает достаточно сложные вычисления и интенсивную работу с внешними устройствами, разработан комплекс аппаратурных и программных средств, связывающих микро-ЭВМ с объектом управления и обеспечивающий возможность эффективного управления установкой. Структурная схема цифровой части системы управления представлена на рис. 1.
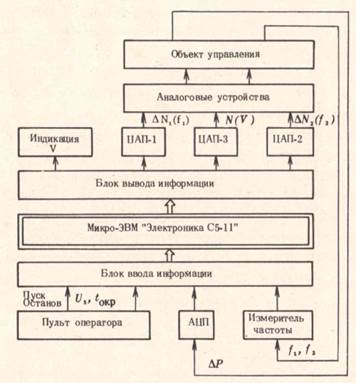
Рис. 1. Структурная схема цифровой части системы управления
За основной регулируемый параметр в рассматриваемой системе принимается скорость воздушного потока v, связанная с избыточным статическим давлением в потоке ∆Р (по отношению к атмосферному давлению В) и температурой воздуха
tокр соотношением
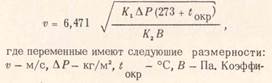
Коэффициенты К1 и К2 служат для согласования размерностей и масштабов и определяются в процессе тарировок датчиков.
Величина избыточного давления ∆Р датчика давления, имеющего выходной сигнал V = 0/4В, преобразуется аналого-цифровым преобразователем (АЦП) в десятиразрядный код. Частоты вращения f1 и f2 вентиляторов измеряются с помощью измерителя частоты вращения, который состоит из датчика импульсов и счетчика. За время измерения, равное 0,1 с, на счетчике формируется значение частоты вращения (число оборотов в минуту).
Со специально разработанных регистров в микро-ЭВМ вводятся коэффициенты, которые являются постоянными для данного объекта и характеризуют аналоговую часть системы управления. С пульта оператора задается скорость воздушного потока vз, которую должна поддерживать система управления tокр и В.
На выходе цифровой системы имеются три управляющих аналоговых сигнала напряжением U = 0/10 В, получаемых с цифроаналоговых преобразователей (ЦАП) и значение текущей скорости воздушного потока v, отображаемое для визуального контроля на цифровом табло.
Для приема всей необходимой информации от датчиков к микро-ЭВМ "Электроника С5-11" подстыкованы специальные блоки. Блок ввода информации содержит девять 12-разрядшх регистров для промежуточного хранения исходных параметров, один 8-разрядный регистр для служебных сигналов и цифровой коммутатор, программно-управляемый от микро-ЭВМ. Наличие регистров позволяет независимо от цикла работы микро-ЭВМ подготавливать исходную информацию.
Блок вывода информации содержит два 12-разрядных и два 8-разрядных регистра, цифровой коммутатор, программно-управляемый от микро-ЭВМ. Посредством этого блока происходит обслуживание ЦАП и индикаторного табло.
Цифровая часть системы управления функционирует следующим образом. При включении питания программа обслуживания цифровых входов анализирует их состояние. По сигналу ПУСК с пульта оператора она переходит на режим управления скоростью потока. При этом в ОЗУ заносятся значения необходимых коэффициентов и величины Vз, tокр, В, ранее установленные оператором. Затем запускается АЦП и измеритель частоты вращения. Дальнейший запуск этих устройств происходит автономно от собственного генератора с частотами 1 кГц и 10 Гц соответственно.
От измерителя частоты после окончания каждого цикла измерения в микро-ЭВМ поступает сигнал ГОТОВНОСТЬ СЧЕТЧИКОВ, разрешающий снимать информацию с соответствующих регистров ввода. Аналогичный сигнал ГОТОВНОСТЬ АЦП поступает в микро-ЭВМ после каждого цикла измерения А Р и преобразования его в цифровую форму.
Вычисленное по результатам измерения значение v выводится на световое табло и сравнивается с vз. По рассогласованию ∆v = v - vз в соответствии с пропорционально-интегральным законом регулирования вырабатывается управляющий сигнал, который через 10-разрядный ЦАП-3 подается на аналоговые устройства, поддерживающие определенную частоту вращения вентиляторов. Микро- ЭВМ сравнивает также значения частот вращения вентиляторов и в случае их рассогласования выдает в аналоговые устройства через 8-разрядные ЦАП-1 и ЦАП-2 корректирующий сигнал.
При v = v3 микро-ЭВМ выдает сигнал, разрешающий работу измерительных и других систем объекта. По сигналу ОСТАНОВ микро-ЭВМ переводит объект управления в исходное состояние.
При наличии нарушений в работе оборудования в микро-ЭВМ могут поступить два аварийных сигнала. Сигнал АВАРИЯ 1 указывает на фатальные нарушения, например отказ в работе АЦП. В этом случае процесс управления продолжать невозможно и микро-ЭВМ переводит объект управления в исходное состояние по соответствующей аварийной программе. Сигнал АВАРИЯ 2 указывает на появление нефатальных нарушений, например нарушения в работе блока индикации скорости потока. Процесс управления не прекращается.
Программное обеспечение для микро-ЭВМ создавалось с учетом повышенных требований к надежности его работы. Все программы делятся на четыре основных блока: ввода, вычислений, вывода и контроля за аварийными ситуациями, управление которыми осуществляется программой-монитором.
Блок ввода вводит информацию в двоично-десятичном или двоичном коде (сигналы аварийных ситуаций, от кнопок ПУСК и ОСТАНОВ, с АЦП измерителя частоты), преобразует двоично-десятичные числа в двоичные, проверяет введенные данные на выход за предельные значения, обрабатывает ошибочные ситуации, вносит проверенные данные в таблицу данных ввода.
Блок вычислений выбирает данные из таблицы данных ввода, вычисляет управляющие воздействия, проверяет результаты вычислений на выход за предельные границы, обрабатывает ошибочные ситуации, вносит полученные данные в таблицу результатов.
Блок вывода выбирает данные из таблицы результатов, сравнивает таблицу результатов с таблицей вывода (если приращение по какому-либо из параметров превысит предельное значение, то в таблице вывода значение данного параметра изменится не более чем на величину предельного приращения, это является необходимой мерой предосторожности при задании больших изменений режима работы), преобразует двоичные числа в двоично-десятичные, выводит данные на четыре 8-раэ- рядных регистра.
Блок контроля за аварийными ситуациями обрабатывает ошибочные ситуации, возникшие в предыдущих блоках и аварийные сигналы от аппаратуры: АВАРИЯ 1, АВАРИЯ 2.
Обмен данными между блоками организуется с помощью таблиц. Данные перед занесением в таблицы проверяются, в результате одноразовые ошибки оператора или сбоя в оборудовании в таблицы не вносятся, процесс управления не прерывается, а продолжается с использованием предыдущих значений. При систематическом появлении ошибочных данных начинают работать программы выхода из аварийных ситуаций.
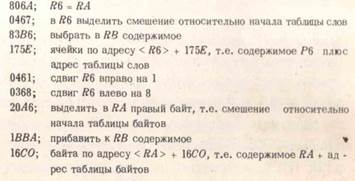
Наряду с высокой надежностью созданное математическое обеспечение обеспечивает достаточно высокое быстродействие при выполнении всего цикла управления. Например, программа преобразования 3-разрядного двоично-десятичного числа из регистра А (RA) в двоичное в регистре В (RB) не содержит ни одной операции умножения (деления), состоит всего из семи команд и использует две таблицы байтов и слов, в которых содержатся двоичные представления двоично-десятичных байтов, правого и левого соответственно:
Для вычисления значения скорости потока использовались таблицы логарифмов и антилогарифмов, что позволило свести операции умножения и деления к сложению и вычитанию, а операцию извлечения квадратного корня - к элементарному сдвигу на один разряд вправо. Из-за небольшого объема ПЗУ пришлось сделать таблицы с большим шагом, поэтому точные значения находились путем интерполяции.
Аналогичные программы использовались в программе преобразования двоичных чисел в двоично-десятичные и других программах. Эффективность математического обеспечения достигнута благодаря учету реальных возможных значений данных ввода, вывода и промежуточных результатов вычислений и, следовательно, за счет сознательного отказа от универсальности.
Особо следует остановиться на технологии создания программного обеспечения. Обычно программа проходит две стадии отладки: вначале с помощью программных имитаторов и интерпретаторов на ЭВМ БЭСМ-6, затем на отладочном комплексе, где в качестве памяти микро-ЭВМ используется память ЭВМ М-220. Вслед за этим она заносится в БИС ПЗУ и, естественно, изменить ее невозможно. Но при использовании микро-ЭВМ в реальных сложных процессах управления этого недостаточно.
Для окончательной отладки всего программного обеспечения в реальных условиях был создан отладочный вариант системы управления с микро- ЭВМ "Электроника С5-01" (рис. 2), имеющей ОЗУ большого объема и устройства ввода-вывода данных. Для удобства подготовки программ написаны отладочные программы, включающие редактор связей и кросс-ассемблер.
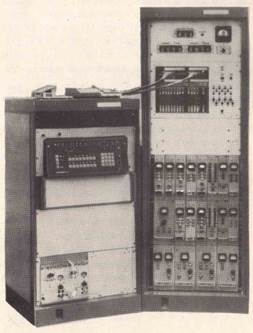
Рис. 2. Отладочный вариант системы управления
С их помощью были получены программы на перфоленте в формате, требуемом для ввода в микро-ЭВМ, проведены их коррекция и объединение в программные блоки. Весь этот комплекс мероприятий позволил создать эффективно работающее надежное математическое обеспечение.
Использование микро-ЭВМ в системе управления мошной вентиляционной установкой позволяет устранить ручные операции и повысить производительность установки по предварительной оценке на 10%. Автоматическое поддержание заданных скоростей потока и сокращение времени перехода с режима на режим экономит большое количество электроэнергии и, следовательно, повышает эффективность установки.
Дата добавления: 2024-01-23; просмотров: 1890;
Поиск по сайту
Узнать еще
- Комплексное управление водными ресурсами. Партнерства и союзы
- Меры контроля городского дренажа. Управление городским дренажом
- Управление людскими ресурсами и наращивание потенциала
- Управление машинами. Объекты и механизмы управления
- Управление оптико-механическим оборудованием
- Управление финансами и ресурсами. Источники дохода
- Управление электротермическим оборудованием

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
