Движение точки по прямой и по окружности
1. Прямолинейное движение. Если траектория точки - прямая линия, то говорят, движение точки прямолинейно. Для описания движения в этом случае достаточно одной координатной оси, которую располагают вдоль по траектории. Координатный и естественный способы задания движения в этом случае совпадают.
В практике наиболее важны два случая - равномерного и ускоренного движения.
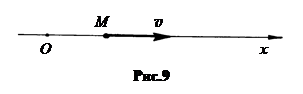 а. Равномерное движение (рис.9). Скорость vпостоянна по величине и по направлению, v= const.Или в проекции: vx= const.. Кинематический закон равномерного движения имеет вид: x = x0 +vxt. (4.1)
а. Равномерное движение (рис.9). Скорость vпостоянна по величине и по направлению, v= const.Или в проекции: vx= const.. Кинематический закон равномерного движения имеет вид: x = x0 +vxt. (4.1)
Начальная координата точки x0 и проекция скорости vx могут иметь знак "плюс" или "минус".
б. Ускоренное движение. Скорость изменяется со временем. Пусть ускорение точки есть a, в проекции на ось ax. Тогда скорость в любой момент времени найдется интегрированием: vx = òaxdt + v0. (4.2)
При постоянном ускорении, ax= const, получаем скорость точки в равноускоренном движении: vx = v0+axt. (4.3)
После второго интегрирования находим закон равноускоренного движения:
x=x0+  x0+v0t+
x0+v0t+  . (4.4)
. (4.4)
Знак числа x0определяется положением точки на координатной оси в начальный момент времени. Справа от точки отсчета - знак "плюс", слева - знак "минус". Знаки чисел v0 и ax определяются знаками проекций соответствующих векторов на ось ОХ. Если вектор vили aсовпадает по направлению с осью OX - знак "плюс", если противоположен - знак "минус".
2. Движение точки по окружности. Наиболее наглядно векторное представление этого движения (рис.10). Здесь С - центр окружности,r - радиус-вектор, проведенный из центра окружности в движущуюся точку М, v- скорость движения точки М.
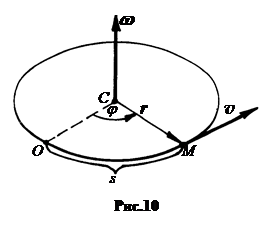 Угловую скорость вращения радиуса - вектора удобно показать вектором угловой скорости w. Модуль вектора w равен производной угла поворота радиуса по времени, w =
Угловую скорость вращения радиуса - вектора удобно показать вектором угловой скорости w. Модуль вектора w равен производной угла поворота радиуса по времени, w =  , а направление w совпадает с поступательным движением правого винта. Все три вектора r, w и v однозначно связаны между собой:
, а направление w совпадает с поступательным движением правого винта. Все три вектора r, w и v однозначно связаны между собой:  = [
= [  ]. (4.5)
]. (4.5)
Вектор w перпендикулярен плоскости траектории, поэтому угол w ^ r = 90°, и v =w r sin(w ^r)=w .r. (4.6)
Найдем ускорение точки М.
 =
=  =
=  [ ] = [
[ ] = [  ] +[
] +[  ] . (4.7)
] . (4.7)
Производная угловой скорости по времени есть угловое ускорение,  , а производная радиуса-вектора - вектор скорости,
, а производная радиуса-вектора - вектор скорости,  = = [ ]Þ = [
= = [ ]Þ = [  ] + [
] + [  [ ]] . (4.8)
[ ]] . (4.8)
Раскроем двойное векторное произведение.
[ [ ]] = ( ) -  (
(  ) =-w2 .Итак: = [ ]-w2 . (4.9)
) =-w2 .Итак: = [ ]-w2 . (4.9)
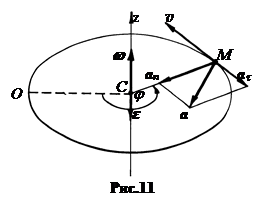
Член [ ] =  - касательное ускорение. Оно или сонаправлено или противоположно по направлению вектору скорости точки .
- касательное ускорение. Оно или сонаправлено или противоположно по направлению вектору скорости точки .
Член -w2 - центростремительное ускорение. Оно перпендикулярно вектору скорости , следовательно, перпендикулярно касательной к траектории. Поэтому его называют нормальным ускорением, -w2  . Вектор полного ускорения равняется сумме касательного и нормального ускорений:
. Вектор полного ускорения равняется сумме касательного и нормального ускорений:  . (4.10)
. (4.10)
Очевидно, модуль полного ускорения a =  . (4.11)
. (4.11)
Если точка в своем движении по окружности проходит расстояние, большее длины окружности, то её смещение по траектории от точки отсчета циклично. Записывать закон движения через смещение в этом случае чревато путаницей. Удобнее закон движения точки по окружности представлять через угол, для которого цикличность естественна (рис.11):
Если точка движется по окружности равномерно, то j = j0+w t. (4.12)
 При ускоренном движении j =j0+w0 t +
При ускоренном движении j =j0+w0 t +  . (4.13)
. (4.13)
Вращательное движение характеризуется ещё такими параметрами:
а. Частота вращения n. Она равна числу оборотов радиуса-вектора в секунду. Единица n - герц, 1 Гц = 1  , n =
, n =  . (4.14)
. (4.14)
б. Период вращения Т. Это время одного оборота радиуса-вектора T =  . (4.15)
. (4.15)
Дата добавления: 2020-05-20; просмотров: 953;
Поиск по сайту
Узнать еще
- II. Движение поездов на однопутных перегонах
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- VI. ДВИЖЕНИЕ В ЦЕНТРАЛЬНОМ ПОЛЕ
- А — рентгенограмма в прямой проекции; б — рентгенограмма после заполнения толстой кишки контрастной массой: стрелками указаны грыжевые ворота.
- А. Уравнения движения точки в декартовых координатах
- А.5 Неравномерное движение.
- А2 - фронтальная проекция точки А.
- Абсолютно твердое тело. Движение твердого тела

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
