Визначення моменту інерції маховика методом Віттенбауера
Як показано вище, за допомогою кривої Віттенбауера  для періоду усталеного руху можна визначити коефіцієнт нерівномірності руху механізму або машини. Тоді, очевидно, якщо при заданій зведеній масі та кінетичній енергії відома залежність між ними, тобто побудовано діаграму , завжди можна з'ясувати питання, як мають бути змінені ці величини (зведений момент інерції
для періоду усталеного руху можна визначити коефіцієнт нерівномірності руху механізму або машини. Тоді, очевидно, якщо при заданій зведеній масі та кінетичній енергії відома залежність між ними, тобто побудовано діаграму , завжди можна з'ясувати питання, як мають бути змінені ці величини (зведений момент інерції  і кінетична Т) для того, щоб забезпечити заданий коефіцієнт нерівномірності
і кінетична Т) для того, щоб забезпечити заданий коефіцієнт нерівномірності  . Для розв'язання цієї задачі запишемо формули, які дозволять визначити значення кутів
. Для розв'язання цієї задачі запишемо формули, які дозволять визначити значення кутів  і
і  (рис. 5.2), що відповідають заданим
(рис. 5.2), що відповідають заданим  8 і діаграмі .
8 і діаграмі .
Розв'язуючи рівняння (5.6) і (5.7) відносно  і
і  , знаходимо:
, знаходимо:

(5.11)
Підносячи праві і ліві частини цих рівнянь до квадрата, дістанемо:
(5.12)
При малих значеннях коефіцієнтів  членом
членом  можна знехтувати. Підставляючи в рівняння (5.12) вирази для
можна знехтувати. Підставляючи в рівняння (5.12) вирази для  і
і  з формул (5.8), після відповідних перетворень, дістанемо:
з формул (5.8), після відповідних перетворень, дістанемо:
(5.13)
За допомогою рівнянь (5.13) можна для заданої кутової швидкості  і для будь-якого значення коефіцієнта нерівномірності руху
і для будь-якого значення коефіцієнта нерівномірності руху  визначити відповідні кути і .
визначити відповідні кути і .
Покажемо, як на практиці використати ці залежності. Нехай для деякого механізму або машини буде побудовано діаграму , яку в нашому випадку досить побудувати тільки для періоду усталеного руху (рис. 5.3). Провівши з початку координат 0 до кривої Віттенбауера дотичні під кутами і , знаходимо за формулою (5.10) коефіцієнт нерівномірності руху механізму або машини.
Припустимо, що коефіцієнт  буде більшим від допустимого значення
буде більшим від допустимого значення  для заданого типу машин. Тоді, підставивши в залежність (5.13) замість
для заданого типу машин. Тоді, підставивши в залежність (5.13) замість  допустиме його значення , знаходимо значення кутів
допустиме його значення , знаходимо значення кутів  і
і  , під якими проводимо дотичні до кривої Віттенбауера (рис. 5.3), і знаходимо їх точку перетину 0'. Очевидно, якщо б початок координат діаграми знаходився у точці 0', то коефіцієнт нерівномірності
, під якими проводимо дотичні до кривої Віттенбауера (рис. 5.3), і знаходимо їх точку перетину 0'. Очевидно, якщо б початок координат діаграми знаходився у точці 0', то коефіцієнт нерівномірності  . Тобто, якщо перейти від системи координат
. Тобто, якщо перейти від системи координат  до
до  , то задача про регулювання руху механізму або машини була б розв'язана. При цьому переході кінетична енергія збільшується на величину Т0, а зведений момент інерції – на величину
, то задача про регулювання руху механізму або машини була б розв'язана. При цьому переході кінетична енергія збільшується на величину Т0, а зведений момент інерції – на величину  . Відрізки х і у, виміряні у міліметрах, зображують у вибраних масштабах
. Відрізки х і у, виміряні у міліметрах, зображують у вибраних масштабах  і
і  величини додаткового зведеного моменту інерції і додаткової кінетичної енергії Т0 , які необхідні для того, щоб машина працювала з вибраним коефіцієнтом нерівномірності .Отже,
величини додаткового зведеного моменту інерції і додаткової кінетичної енергії Т0 , які необхідні для того, щоб машина працювала з вибраним коефіцієнтом нерівномірності .Отже,
 (5.14)
(5.14)
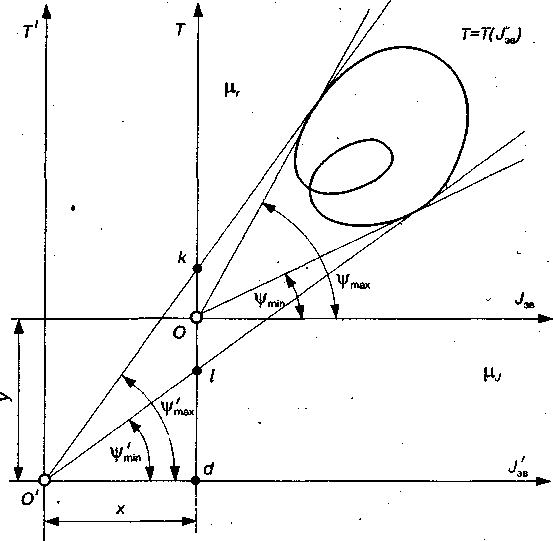
Рис. 5.3. Визначення моменту інерції маховика методом Віттенбауера
З побудови безпосередньо випливає, що чим менший коефіцієнт нерівномірності  , тим менша різниця між кутами і , і тим далі від кривої , що відповідає часові усталеного руху, буде початок координат, тобто при зменшенні величини зростає зведена маса машини і її кінетична енергія, потрібна для надання руху машині із заданою середньою швидкістю . Отже, збільшення рівномірності руху ланки зведення можна досягти, збільшивши зведений момент інерції механізму чи машини. Збільшити зведені маси або зведений момент інерції можна за рахунок збільшення мас окремих ланок механізму. Практично це збільшення мас здійснюється за допомогою посадки на один з валів машини додаткової деталі, що має певний момент інерції. Ця деталь називається маховим колесомабо маховиком. Як було показано вище, для того, щоб забезпечити заданий коефіцієнт нерівномірності , треба збільшити зведений момент інерції механізму або машини на величину (5.14). Величина цього додаткового моменту і визначає момент інерції маховика, тобто
, тим менша різниця між кутами і , і тим далі від кривої , що відповідає часові усталеного руху, буде початок координат, тобто при зменшенні величини зростає зведена маса машини і її кінетична енергія, потрібна для надання руху машині із заданою середньою швидкістю . Отже, збільшення рівномірності руху ланки зведення можна досягти, збільшивши зведений момент інерції механізму чи машини. Збільшити зведені маси або зведений момент інерції можна за рахунок збільшення мас окремих ланок механізму. Практично це збільшення мас здійснюється за допомогою посадки на один з валів машини додаткової деталі, що має певний момент інерції. Ця деталь називається маховим колесомабо маховиком. Як було показано вище, для того, щоб забезпечити заданий коефіцієнт нерівномірності , треба збільшити зведений момент інерції механізму або машини на величину (5.14). Величина цього додаткового моменту і визначає момент інерції маховика, тобто
 (5.15)
(5.15)
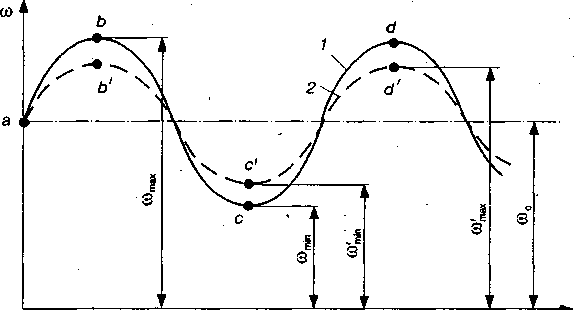
Завданням маховика є регулювання періодичних коливань швидкості початкової ланки, які обумовлені властивостями самих механізмів або періодичною зміною співвідношень між величинами рушійних сил і сил опору. Підбором моменту інерції маховика можна змусити початкову ланку механізму рухатись з наперед заданим відхиленням від деякої її середньої швидкості. Маховик є ніби акумулятором кінетичної енергії механізмів або машини, що нагромаджує її в моменти прискорення руху механізмів і віддає назад у моменти сповільнення руху машини. Для кращого розуміння дії маховика як гасителя коливань швидкості обертання тіла, біля його середнього значення на рис. 5.4 показано дві діаграми  : 1 - машини без маховика, 2 - машини з маховиком. Введення маховика в машину дозволяє зменшити коливання швидкості відносно її середнього значення , тому при збільшенні швидкості обертання ланки зведення (на рис. 5.5 ділянки ab, сd) частина кінетичної енергії машини йде на збільшення кінетичної енергії маховика (
: 1 - машини без маховика, 2 - машини з маховиком. Введення маховика в машину дозволяє зменшити коливання швидкості відносно її середнього значення , тому при збільшенні швидкості обертання ланки зведення (на рис. 5.5 ділянки ab, сd) частина кінетичної енергії машини йде на збільшення кінетичної енергії маховика (  ), і, навпаки, коли швидкість обертання зменшується, маховик віддає частину нагромадженої кінетичної енергії машині, завдяки чому зміна швидкості буде менша
), і, навпаки, коли швидкість обертання зменшується, маховик віддає частину нагромадженої кінетичної енергії машині, завдяки чому зміна швидкості буде менша  . Крива попаде не в точку с, а в точку
. Крива попаде не в точку с, а в точку  .У деяких робочих машинах, в яких корисне навантаження періодично змінюється в значних межах (дробарки, прокатні стани і т.п.), маховик акумулює дуже значні запаси кінетичної енергії в моменти прискорення руху, тобто в моменти зниження корисних навантажень. Така акумулююча роль маховика дає можливість використати нагромаджену ним енергію для подолання підвищених корисних навантажень без збільшення потужності двигуна.
.У деяких робочих машинах, в яких корисне навантаження періодично змінюється в значних межах (дробарки, прокатні стани і т.п.), маховик акумулює дуже значні запаси кінетичної енергії в моменти прискорення руху, тобто в моменти зниження корисних навантажень. Така акумулююча роль маховика дає можливість використати нагромаджену ним енергію для подолання підвищених корисних навантажень без збільшення потужності двигуна.
|
Рис. 5.4. Зменшення коливань швидкості за допомогою маховика
Для зменшення коливань швидкості маховик повинен мати відповідний момент інерції. Згідно з формулою (4.38)  , прийнявши
, прийнявши  маємо
маємо
 . (5.16)
. (5.16)
Отже, чим більший момент інерції  обертових мас (включаючи маховик) при тому ж самому зведеному (надлишковому) моменті сил, тим менше кутове прискорення
обертових мас (включаючи маховик) при тому ж самому зведеному (надлишковому) моменті сил, тим менше кутове прискорення  ланки зведення, а значить, тим менша зміна кутової швидкості.
ланки зведення, а значить, тим менша зміна кутової швидкості.
На основі того, що кутове прискорення  , залежність (5.16) можна записати у такому вигляді:
, залежність (5.16) можна записати у такому вигляді:
 . (5.17)
. (5.17)
Звідси видно, що при всіх інших рівних умовах зміна величини кутової швидкості  прямо пропорційна часу дії надлишкового моменту Мзв. Це показує, що результуюча дія маховика найефективніша при короткочасних коливаннях величини обертового моменту Мзв, а також при різких (миттєвих) змінах величини опору. Маховик не допоможе, якщо, наприклад, при тому ж навантаженні на паровий двигун упаде тиск пари в котлі або при цьому ж тиску значно збільшилось на тривалий час навантаження. У таких випадках використовуються регулятори швидкості, мова про яких буде далі (п. 5.5).
прямо пропорційна часу дії надлишкового моменту Мзв. Це показує, що результуюча дія маховика найефективніша при короткочасних коливаннях величини обертового моменту Мзв, а також при різких (миттєвих) змінах величини опору. Маховик не допоможе, якщо, наприклад, при тому ж навантаженні на паровий двигун упаде тиск пари в котлі або при цьому ж тиску значно збільшилось на тривалий час навантаження. У таких випадках використовуються регулятори швидкості, мова про яких буде далі (п. 5.5).
Для більшої ефективності дії маховика, зменшення маси, габаритів доцільно його ставити на швидкохідний вал, оскільки кінетична енергія маховика, у результаті зміни якої здійснюється регулювання швидкості машини, виражається формулою:
 (5.18)
(5.18)
Звідси видно, що ця енергія прямо пропорційна  . Цим дуже часто користуються на практиці, встановлюючи маховик на швидкохідному валу, наприклад в інерційному стартері. Проте деколи маховик встановлюють і на тихохідних валах, ближче до тих частин машини (джерела коливання швидкості), нерівномірність руху яких треба зменшити, щоб ці коливання швидкості не передавались на інші ланки передавального механізму (зубчасті колеса, муфти тощо).
. Цим дуже часто користуються на практиці, встановлюючи маховик на швидкохідному валу, наприклад в інерційному стартері. Проте деколи маховик встановлюють і на тихохідних валах, ближче до тих частин машини (джерела коливання швидкості), нерівномірність руху яких треба зменшити, щоб ці коливання швидкості не передавались на інші ланки передавального механізму (зубчасті колеса, муфти тощо).
Якщо маховик встановлюється не на ланці зведення, а на будь-якій і-й ланці машини, то завжди повинна задовольнятися умова рівності кінетичної енергії:
 , (5.19)
, (5.19)
де  – момент інерції маховика, встановленого на і-й ланці;
– момент інерції маховика, встановленого на і-й ланці;  – кутова швидкість цієї ланки.
– кутова швидкість цієї ланки.
З рівняння (5.19) випливає
 . (5.20)
. (5.20)
Отже, чим більшою буде кутова швидкість і-оїланки, тим менший повинен бути момент інерції маховика. Тому вигідно з точки зору зменшення ваги або діаметра маховика встановлювати його на ланках, що мають великі швидкості.
З рівняння (5.20) також випливає, що для забезпечення умови сталості моменту інерції необхідно, щоб передаточне відношення  було сталим, що вимагає встановлення маховика на ланках, які зв'язані з ведучим валом механізму передаточним відношенням сталої величини (механізми круглих зубчатих коліс, черв'ячні механізми і т. д.).
було сталим, що вимагає встановлення маховика на ланках, які зв'язані з ведучим валом механізму передаточним відношенням сталої величини (механізми круглих зубчатих коліс, черв'ячні механізми і т. д.).
При встановленні маховика не на ланці зведення необхідно врахувати жорсткість проміжного кінематичного ланцюга При малій жорсткості кінематичного ланцюга пружні коливання можуть бути такими великими, що махове колесо не виконуватиме свого призначення.
Треба зазначити далі, що при малих значеннях коефіцієнта внаслідок незначної різниці між кутами і точка перетину 0' дотичних (рис. 5.3) дуже часто знаходиться за межами рисунка. У цьому випадку можна використати точки перетину k і l дотичних з віссю Т першої системи координат. Тоді, очевидно:
.

і, далі,
(5.21)
Підставляючи (5.21) у рівняння (5.10), знаходимо
звідки, враховуючи, що  , дістаємо
, дістаємо
 (5.22)
(5.22)
Аналогічно можна дістати формулу для визначення моменту інерції маховика через точки перетину дотичних з віссю абсцис першої системи координат.
Визначення розмірів маховика.Оскільки маховик звичайно роблять у вигляді колеса (рис. 5.5), що має масивний обід 1, сполучений з втулкою 2 спицями 3 (або тонким диском), то моментами інерції з'єднуючих частин часто нехтують і наближено вважають, що маса маховика рівномірно розподілена по колу радіуса R = D/2, геометричному місцю центрів ваги поперечних перерізів обода. Тоді момент інерції маховика можна виразити так:
 (5.23)
(5.23)
де m - маса ободу маховика.
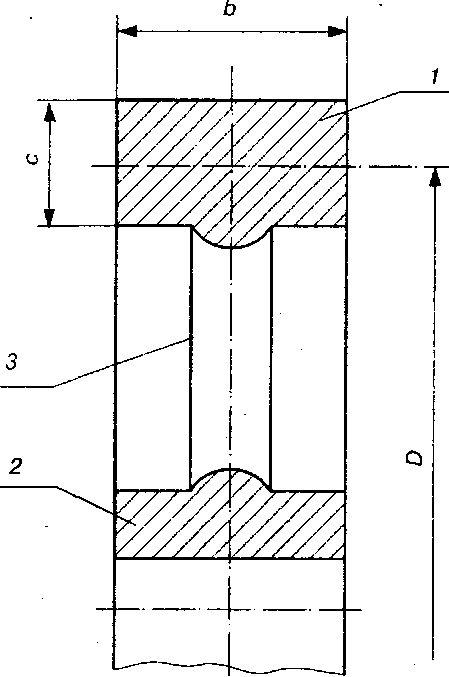
Рис. 5.5. Конструкція маховика
Добуток маси обода маховика на квадрат його діаметра тD2 називається маховим моментом або характеристикою маховика. Для багатьох деталей машин, що здійснюють обертовий рух (муфти, ротори електродвигунів тощо) ця характеристика наводиться в довідниках. Характеристика маховика має одиницю кг∙м2. За нею легко визначити необхідну масу маховика, якщо задано або вибрано його діаметр, значення якого визначається з чисто конструктивних міркувань Щоб запобігти небезпеці можливого розриву маховика, його діаметр D вибирають таким, щоб колова швидкість на ободі не перевищувала, допустимої для матеріалу маховика величини. Можна рекомендувати для перевірки діаметра маховика таку залежність:
 , (5.24)
, (5.24)
де  – допустима колова швидкість обода маховика, яка не повинна перевищувати для стальних маховиків 70-120 м/с, для чавунних - 30-45 м/с; п -частота обертання маховика,
– допустима колова швидкість обода маховика, яка не повинна перевищувати для стальних маховиків 70-120 м/с, для чавунних - 30-45 м/с; п -частота обертання маховика,  .
.
Якщо врахувати, що маса ободу маховика може практично бути прийнята
 ,
,
де  – маса обода маховика, тоді ширина b обода маховика визначається з виразу
– маса обода маховика, тоді ширина b обода маховика визначається з виразу
 . (5.25)
. (5.25)
Tут  – густина матеріалу (
– густина матеріалу (  );
);  .
.
Тоді, якщо прийняти 
 , маємо
, маємо
 (м). (5.26)
(м). (5.26)
Наближений метод побудови кривої Віттенбауера.Отже, маючи побудовану діаграму при заданих коефіцієнті нерівномірності руху і середній кутовій швидкості обертання ланки зведення, можна визначити момент інерції маховика і, тим самим, визначити його масу й розміри. Проте на практиці ця задача ускладнюється тим, що для побудови діаграми  необхідно мати діаграми зведених моментів рушійних сил
необхідно мати діаграми зведених моментів рушійних сил  і сил опору
і сил опору  . Причому для робочих машин, знаючи технологічні опори, можна знайти значення зведених моментів сил опору (див. п. 4.6), тобто побудувати діаграму . Приклад такої діаграми показаний на рис. 5.6,а. Зведений момент рушійних сил, як правило, для таких машин важко знайти, а тому його приймають сталим, тобто
. Причому для робочих машин, знаючи технологічні опори, можна знайти значення зведених моментів сил опору (див. п. 4.6), тобто побудувати діаграму . Приклад такої діаграми показаний на рис. 5.6,а. Зведений момент рушійних сил, як правило, для таких машин важко знайти, а тому його приймають сталим, тобто  , величину якого можна визначити, виходячи з рівності робіт рушійних сил
, величину якого можна визначити, виходячи з рівності робіт рушійних сил  і сил опору
і сил опору  за один цикл руху механізму або машини.
за один цикл руху механізму або машини.
Діаграму роботи сил опору  можна одержати шляхом графічного інтегрування діаграми (рис. 5.7, б), оскільки робота визначається залежністю
можна одержати шляхом графічного інтегрування діаграми (рис. 5.7, б), оскільки робота визначається залежністю
 (5.27)
(5.27)
Як відомо, графічна інтерпретація інтеграла є площа, яка обмежена кривою , віссю  і крайніми ординатами, ділянки кривої, що відповідають кутам
і крайніми ординатами, ділянки кривої, що відповідають кутам  і
і  . Наприклад, на ділянці а – 2 робота сил опору
. Наприклад, на ділянці а – 2 робота сил опору
 ;
;
на ділянці 2-3
 і т.п.
і т.п.
Відклавши на відповідних ординатах ці роботи у масштабі  , одержимо діаграму . Практично цих розрахунків не роблять,
, одержимо діаграму . Практично цих розрахунків не роблять,
а виконують побудову, обернену до тої, яку ми робили при графічному диференціюванні (методом хорд). А саме: площу криволінійної трапеції  замінюємо площею прямокутника, висоту якого переносимо на вісь координат
замінюємо площею прямокутника, висоту якого переносимо на вісь координат  , здобуту точку
, здобуту точку  з'єднуємо з точкою Р. Відрізок 0Р=Н визначає масштаб побудови діаграми робіт
з'єднуємо з точкою Р. Відрізок 0Р=Н визначає масштаб побудови діаграми робіт
 . (5.28)
. (5.28)
У нашому випадку робота сил опору на ділянці 0 – a дорівнює нулю, оскільки  . Тоді з точки а на діаграмі (рис. 5.7, б) проводимо на ділянці a – 2 лінію
. Тоді з точки а на діаграмі (рис. 5.7, б) проводимо на ділянці a – 2 лінію  , паралельну
, паралельну  і дістанемо точку
і дістанемо точку  . Аналогічно здійснюємо побудову на інших ділянках (2-3, 3-4 і т.п), що дозволяє здобути точки
. Аналогічно здійснюємо побудову на інших ділянках (2-3, 3-4 і т.п), що дозволяє здобути точки  ,
,  і т.д., з'єднавши які плавною кривою, дістанемо діаграму . На ділянці
і т.д., з'єднавши які плавною кривою, дістанемо діаграму . На ділянці  робота
робота  , оскільки , і робота сил опору не змінюється.
, оскільки , і робота сил опору не змінюється.
Діаграма робіт рушійних сил  при такому припущенні ( ) зображатиметься прямою лінією
при такому припущенні ( ) зображатиметься прямою лінією  , яка проходитиме через точки 0 і 0'" діаграми . Це пояснюється тим, що зміна кінетичної енергії
, яка проходитиме через точки 0 і 0'" діаграми . Це пояснюється тим, що зміна кінетичної енергії  , за один цикл усталеного руху дорівнює нулю, тобто на початку і в кінці циклу
, за один цикл усталеного руху дорівнює нулю, тобто на початку і в кінці циклу  . Провівши через точку Р лінію (рис. 5.6, а), яка паралельна лінії
. Провівши через точку Р лінію (рис. 5.6, а), яка паралельна лінії  на діаграмі робіт (рис. 5.6, б), дістанемо точку
на діаграмі робіт (рис. 5.6, б), дістанемо точку  , яка визначить величину зведеного моменту рушійних сил
, яка визначить величину зведеного моменту рушійних сил  .
.
На підставі діаграм робіт рушійних сил і сил опору будуємо діаграму зміни кінетичної енергії механізму або машини без маховика за формулою:
 . (5.29)
. (5.29)
Якщо діаграма  будується в тому ж масштабі, що і діаграми робіт, досить на відповідних ординатах (рис. 5.6,в).відкласти відрізки, які знаходяться між кривими
будується в тому ж масштабі, що і діаграми робіт, досить на відповідних ординатах (рис. 5.6,в).відкласти відрізки, які знаходяться між кривими  і , тобто
і , тобто  і т.д. Якщо
і т.д. Якщо  , то
, то  , і навпаки, якщо
, і навпаки, якщо  , то
, то  .
.
Діаграми зведених моментів інерції  (рис. 5.7,г) і крива Віттенбауера
(рис. 5.7,г) і крива Віттенбауера  (рис. 5.6,д) будується так, як це описано вище (п. 4.7, 4.12).
(рис. 5.6,д) будується так, як це описано вище (п. 4.7, 4.12).
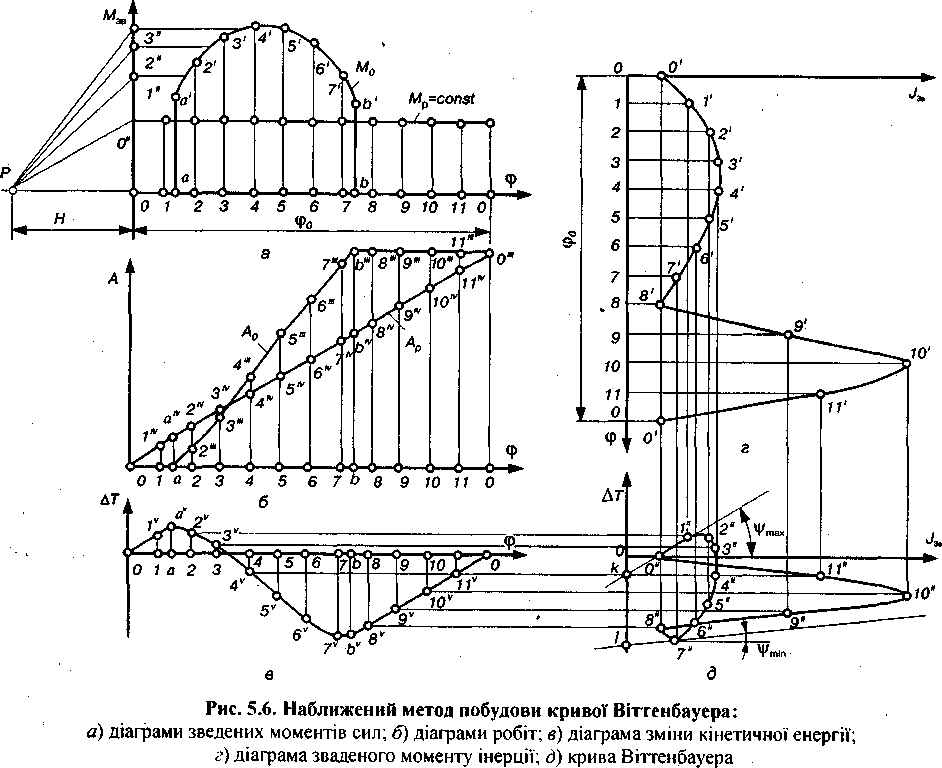
Рис. 5.6. Наближений метод побудови кривої Віттенбауера:
а) діаграма зведених моментів сил; б) діаграми робіт; в) діаграма зміни кінетичної енергії; г) діаграма зведеного моменту інерції; д) крива Віттенбауера.
Для машини-двигуна, як правило, неважко побудувати діаграми зведених рушійних сил маючи індикаторну діаграму, тобто знаючи тиск p на робочий поршень залежно від переміщення поршня s. Тоді методом графічного інтегрування цієї діаграми будуємо діаграму робіт рушійних сил . У таких машинах зведений момент сил опору приймається сталим  . Всі інші побудови виконуються аналогічно.
. Всі інші побудови виконуються аналогічно.
У технічній і навчальній літературі наводяться інші методи визначення моменту інерції маховика. Заслуговують на особливу увагу методи, які враховують механічні характеристики двигунів.
Дата добавления: 2016-06-15; просмотров: 2875;
Поиск по сайту
Узнать еще
- I. Расчёт методом контурных токов.
- II. Расчёт методом суперпозиции.
- IV. Расчёт простых цепей постоянного тока методом эквивалентных преобразований сопротивлений.
- Алгоритм вычисления ПХ классическим методом
- Алгоритм вычисления ПХ операторным методом
- Алгоритм отделения корней методом последовательного перебора
- Алгоритм расчета переходного процесса классическим методом
- Алгоритм решения задач этим методом.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
