Регулятори швидкості
За допомогою маховика можна регулювати швидкість руху ланки зведення механізму або машини лише для періодичних і короткочасних неперіодичних коливань швидкості тобто коли рушійні сили і сили опору, як правило, змінюються протягом циклу за певним законом і робота рушійних сил за повний цикл дорівнює роботі сил опору. Крива Віттенбауера при такому русі - замкнута крива і має цілком визначену форму.
Проте маховик не може регулювати довгочасні і неперіодичні коливання швидкості, коли робота рушійних сил не дорівнює роботі сил опору. Наприклад, навантаження на двигун внутрішнього згорання автомобіля значно зростає внаслідок крутого підйому дороги Це викликає значну зміну моменту сил опору на валу двигуна, у результаті цього порушується відповідність між роботою рушійної сили двигуна і роботою сил опору руху автомобіля, що викликає зменшення його швидкості. І навпаки, при крутому спуску автомобіля, його швидкість може значно збільшуватися до величини, яка буде більшою з точки зору безпеки руху. Водій автомобіля здійснює регулювання швидкості руху за рахунок зміни роботи рушійних сил (додатковою подачею палива в двигун) або включенням додаткової роботи сил опору (гальмуванням). Це дозволяє зберігати відповідний баланс робіт і необхідну швидкість автомобіля.
Таким чином, щоб забезпечити коливання швидкості ланки зведення в заданих межах, треба щоб у машині за один цикл підтримувалась рівність робіт рушійних сил і сил опору  . Для цього, як правило, встановлюють спеціальні механізми, пристрої, які називають регуляторами швидкості. Завдання регулятора полягає в тому, щоб встановити стійкий (стаціонарний), за законом зміни значення швидкості режим руху початкового вала механізму або машини, чого можна досягти вирівнюванням різниці між рушійними силами і силами опору. Так, якщо внаслідок якихось причин зменшився опір і машина починає прискорювати свій рух, то регулятор автоматичнозменшує рушійні сили. Навпаки, якщо сили опору збільшилися і машина починає сповільнювати рух, то регулятор збільшує рушійні сили. Отже, як тільки порушується рівновага між рушійними силами і силами опору, регулятор повинен знов їх збалансувати і змусити машину працювати з попередніми або близькими до попередніх швидкостями. У деяких машинах, зокрема у транспортних, регулювання руху досягається не тільки зміною рушійних сил, але й сил опору (гальмуванням).
. Для цього, як правило, встановлюють спеціальні механізми, пристрої, які називають регуляторами швидкості. Завдання регулятора полягає в тому, щоб встановити стійкий (стаціонарний), за законом зміни значення швидкості режим руху початкового вала механізму або машини, чого можна досягти вирівнюванням різниці між рушійними силами і силами опору. Так, якщо внаслідок якихось причин зменшився опір і машина починає прискорювати свій рух, то регулятор автоматичнозменшує рушійні сили. Навпаки, якщо сили опору збільшилися і машина починає сповільнювати рух, то регулятор збільшує рушійні сили. Отже, як тільки порушується рівновага між рушійними силами і силами опору, регулятор повинен знов їх збалансувати і змусити машину працювати з попередніми або близькими до попередніх швидкостями. У деяких машинах, зокрема у транспортних, регулювання руху досягається не тільки зміною рушійних сил, але й сил опору (гальмуванням).
Конструкції регуляторів і схеми регулювання бувають різні. Наприклад, у практиці застосовуються так звані відцентрові регулятори,плоскі й просторові, в яких використовується відцентрова сила інерції. Є інерційні регулятори, які використовують тангенціальні (дотичні) сили інерції. Застосовуються також регулятори електричного типута ін.
Розглянемо приклад автоматичного регулювання кутової швидкості початкової ланки машинного агрегата за допомогою відцентрового регулятора швидкості. На рис. 5.7 зображено машинний агрегат [1], що складається з робочої машини 2 і теплового двигуна 1. Чутливим елементом є відцентровий регулятор 3. Регулятор складається з двох важких куль К, що сидять на ланках АС і BD. Ці ланки шарнірно зв'язані з ланками СЕ і DF, які в свою чергу шарнірно зв'язані з муфтою N, що може вільно ковзати вздовж напрямної  . Ланки АС і BD зв'язані пружиною L, яка намагається зблизити кулі К. Регулятор приводиться в рух від початкової ланки машини парою конічних коліс H і G. При обертанні початкової ланки двигуна з кутовою швидкістю
. Ланки АС і BD зв'язані пружиною L, яка намагається зблизити кулі К. Регулятор приводиться в рух від початкової ланки машини парою конічних коліс H і G. При обертанні початкової ланки двигуна з кутовою швидкістю  регулятор обертається зі швидкістю
регулятор обертається зі швидкістю  , при чому
, при чому  .
.
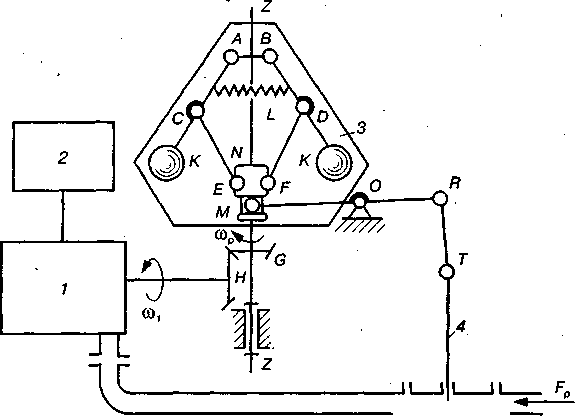
Рис. 5.7. Відцентровий регулятор швидкості
При різних кутових швидкостях початкової ланки муфта N має різні положення, які визначаються величиною відцентрової сили інерції, що діє на кулі К. Чим більше швидкість обертання вала регулятора, тим більші сили інерції діють на кулі, тим вище піднімається муфта N, і навпаки, чим менша швидкість , тим менші сили інерції діють на кулі, а значить, нижче знаходиться муфта N. З муфтою N з'єднано механізм, що збільшує або зменшує подачу рушійної енергії в машину. Цей механізм складається з важелів ОR і RТ і заслінки 4. Палець М, що належить важелю ОR, ковзає в напрямних муфти N. Припустимо, що внаслідок зменшення сил опору кутова швидкість регулятора збільшилась. Тоді тягарі К під дією відцентрових сил віддалятимуться від осі обертання регулятора, і муфта N переміщатиметься вгору. При цьому важіль RТ діятиме на заслінку 4, яка, опускаючись донизу, зменшить переріз каналу, по якому надходить у двигун робоча речовина (пара, вода, газ тощо). Тоді рушійні сили зменшаться, кутова швидкість також зменшиться, і муфта N почне переміщатися вниз. Отже, заслінка 4 переміщатиметься вгору, збільшуючи переріз каналу. Після збільшення подачі рушійної енергії процес може знову повторитися. Отже, робота регулятора - це деякий коливальний процес. Регулятор реагує автоматично на зміну кутової швидкості початкової ланки двигуна і забезпечує подачу необхідної енергії для пересування регулювального органу. Треба відзначити, що описаний спосіб регулювання має той недолік, що після зниження навантаження кутова швидкість буде трохи вищою від тієї, яку мала машина до зниження навантаження, хоч рух машини і буде усталений, але швидкості цього руху будуть вже інші і дещо більші, ніж на початку процесу регулювання. Щоб уникнути зазначеної зміни швидкості, у техніці часто застосовують складніші схеми регулювання.
Описаний тип регулятора називається регулятором прямоїдії, оскільки в ньому регулятор безпосередньо з'єднаний з механізмом, що регулює подачу рушійної енергії. У розглянутому прикладі заслінка переміщується за рахунок відцентрових сил куль регулятора. У деяких випадках цих сил може бути не досить для переміщення заслінки, тоді необхідно включити в схему регулювання допоміжне джерело енергії, яке називають сервомотором. Такі регулятори називаються регуляторами непрямої дії.
Чутливість регулятора до зміни швидкості початкової ланки і її коефіцієнта нерівномірності руху  (5.7) визначається відповідним підбором мас куль К, силою пружності пружини L, масами і розмірами ланок механізму регулятора. Детальніше це питання розглядається в спеціальній літературі з теорії автоматичного регулювання.
(5.7) визначається відповідним підбором мас куль К, силою пружності пружини L, масами і розмірами ланок механізму регулятора. Детальніше це питання розглядається в спеціальній літературі з теорії автоматичного регулювання.
Питання для самоперевірки
І. Задача про регулювання руху машин. 2. Причини коливань швидкості ланки зведення (головного валу машини)? Типи коливань цієї швидкості. 3. Поняття про середню швидкість і коефіцієнт нерівномірності руху машини. 4. Визначення коефіцієнта нерівномірності руху за допомогою кривої Віттенбауера. 5. Для чого встановлюють на машинах маховик? Коли його дія є ефективною? Як впливає наявність маховика на час розбігу та вибігу машини? б. Що необхідно зробити, щоб зменшити вагу і розміри маховика? 7. Які допущення приймають при знаходженні моменту інерції маховика реальних машин методом Віттенбауера? 8. Призначення та принцип роботи регуляторів швидкості.
Розділ 6
ТЕРТЯ В МАШИНАХ
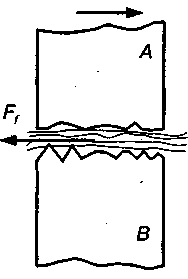
Під час руху одного тіла відносно іншого між поверхнями, що стикаються, виникає взаємодія, яка перешкоджає переміщенню цього тіла, а якщо воно знаходиться в стані спокою, –його відносному зміщенню. Це явище називається тертям, а сили опору – силами тертя. Отже, тертям називають опір, що виникає при переміщенні одного тіла відносно іншого. Поверхні, якими стикаються між собою тіла, називаються тертьовими.
Виникнення тертя пояснюється двома основними причинами. По-перше, поверхні тертя не абсолютно гладкі, а мають нерівності, які при стиканні поверхонь створюють опір руху  (рис. 6.1). По-друге, між тілами, які стикаються поверхнями, виникають сили молекулярної взаємодії, для подолання яких також необхідно прикласти силу. Як показують експериментальні дослідження, тертя є складний комплекс механічних, фізичних і хімічних явищ, причому ті чи інші явища переважають залежно від умов, за яких проходить процес тертя.
(рис. 6.1). По-друге, між тілами, які стикаються поверхнями, виникають сили молекулярної взаємодії, для подолання яких також необхідно прикласти силу. Як показують експериментальні дослідження, тертя є складний комплекс механічних, фізичних і хімічних явищ, причому ті чи інші явища переважають залежно від умов, за яких проходить процес тертя.
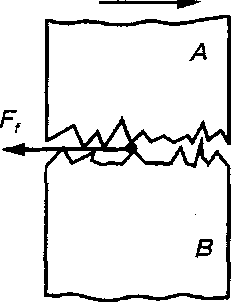
| Рис. 6.1. Взаємодія поверхонь тертя |
Тертя є одним із найбільш розповсюджених явищ природи і дуже важливе в техніці. Цілий ряд задач механіки, деталей машин, спеціальних технічних дисциплін не можуть бути розв'язані без знань законів тертя. На використанні сил тертя ґрунтується робота багатьох механізмів і машин (пасової і фрикційної передач, транспортних машин, прокатних станів, фрикційних муфт, гальм тощо). Великі сили тертя виникають при обробці різних матеріалів різанням, пресуванням тощо.
Тертя в машинах є як корисним, так і шкідливим. З одного боку, завдяки тертю рухаються тіла; з іншого – тертя є причиною зношування деталей машин і приладів, значних витрат енергії. Підраховано, що біля 1/3 світових енергетичних ресурсів даремно витрачаються на роботу, пов'язану з тертям.
Відомо, що перші дослідження явища тертя проводив ще Леонардо да Вінчі. Детальні дослідження законів тертя почав французький механік і фізик Г. Амонтон (1663-1705). Потім, протягом усього століття, велись дослідження в цьому напрямку. У 1781 р. Ш. Кулон опублікував роботу „Теорія простих машин з точки зору їх частин...", в якій розвинув теорію тертя, сформулював основні закони тертя. Експериментальні дослідження тертя продовжували і послідовники Кулона Проте треба зауважити, що ця складна наукова проблема і до нашого часу цілком нерозв'язана. Тому на практиці все ще користуються наближеними емпіричними законами, які були відкриті Амонтоном і Кулоном. Якщо треба мати більшу точність розрахунків, то доводиться визначати силу тертя експериментально для кожної пари тертьових поверхонь і конкретних умов тертя.
Власне кажучи, вивчення всіх особливостей теорії тертя виходить за межі курсу теорії механізмів і машин. Тут ми будемо розглядати тільки ті елементи цієї теорії, які необхідні, щоб хоча би наближено визначити, вплив тертя на реальні значення сил, що діють на тіла, встановити умови їх рівноваги, врахувати сили тертя при розв'язанні тих чи інших інженерних задач, в яких неможливо ними знехтувати.
Види тертя
Залежно від характеру відносного переміщення тіл, що стикаються, відрізняють два види тертя: ковзання і кочення. При терті ковзання одні й ті ж самі поверхні одного тіла стикаються з різними поверхнями іншого тіла. При терті кочення різні поверхні одного тіла послідовно стикаються з різними поверхнями іншого тіла.
Прикладами тертя ковзання можуть служити тертя лиж по снігу, пили по дереву, різця по металу, підошви взуття по землі, цапфи вала по втулці підшипника тощо. Тертя кочення має місце при перекочуванні коліс автомобіля по землі або вагона по рейках, у шарикових або роликових підшипниках, фрикційних передачах тощо.
Для зменшення сил тертя використовують різні мастила. Залежно від їх наявності між тертьовими поверхнями відрізняють два основних види тертя: сухе тертя (без мастильних матеріалів) і рідинне тертя (з мастильними матеріалами). При сухому терті між тертьовими поверхнями тіл відсутнє будь-яке мастило. При рідинному терті тертьові поверхні тіл повністю розділені шаром мастила (рис. 6.2) і тертя твердих частин тіла замінено тертям окремих шарів мастила. Мастило може бути твердим, рідким або газоподібним.
| Рис.6.2. Рідинне тертя |
Крім цього, інколи ще відрізняють проміжні види тертя: граничне, напівсухе і напіврідинне. При граничному терті на тертьових поверхнях є тонкі адсорбовані маслянисті плівки. Напівсухе і напіврідинне тертя не мають між собою різкої границі: якщо перевершує сухе тертя (більша частина поверхні контакту не покрита мастилом), то вважають, що тертя напівсухе, і навпаки, якщо перевершує рідинне тертя, то маємо напіврідинне тертя.
Тертя ковзання
При терті ковзання виникає сила тертя ковзання (рис. 6.3, а), яку можна наближено визначити за формулою Амонтона-Кулона
 (6.1)
(6.1)
де f- коефіцієнт тертя ковзання; N - нормальна реакція, у нашому випадку вона дорівнює силі G, яка притискає тіло 1 доповерхні тіла 2 (N=G).
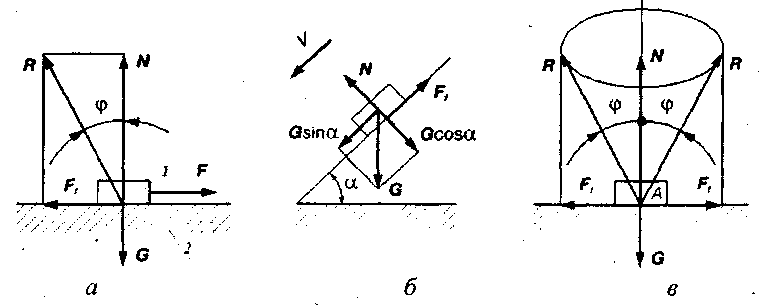
Рис.6.3. Тертя ковзання:
а) кут тертя; б) тертя на похилій площині; в) конус тертя
Сила нормального тиску дорівнює вазі тіла тільки тоді, коли поверхня ковзання – горизонтальна площина і на тіло не діють інші сили, крім сили його ваги. Якщо тіло лежить на похилій площині (рис. 6.3, б), то нормальна реакція  , де
, де  - кут нахилу площини. Якщо ж на тіло крім сили тяжіння діють ще інші сили, то за силу нормального тиску на поверхню треба приймати нормальну складову рівнодіючої всіх прикладених до нього сил.
- кут нахилу площини. Якщо ж на тіло крім сили тяжіння діють ще інші сили, то за силу нормального тиску на поверхню треба приймати нормальну складову рівнодіючої всіх прикладених до нього сил.
Під коефіцієнтом тертя ковзання розуміють відношення сили тертя до нормальної реакції:
 . (6.2)
. (6.2)
Коефіцієнт тертя залежить від матеріалу тіл, що стикаються, і фізичного стану тертьових поверхонь, тобто від величини і характеру шорсткості, наявності мастила, вологості, температури та інших умов. Матеріали, які мають високий коефіцієнт тертя, називають фрикційними(шкіра, гума, текстоліт, азбест тощо) і, навпаки, низький коефіцієнт тертя, – антифрикційними(бронза, бабіт, сірий чавун, капрон і деякі інші види пластмас).
Відрізняють силу і коефіцієнт тертя спокою і руху. Сила тертя під час руху менша сили тертя спокою. Це ж відноситься і до коефіцієнта тертя. Сила тертя завжди направлена в бік, протилежний відносним швидкостям, а в стані спокою тіла – протилежно силі, яка намагається вивести це тіло зі стану спокою.
Кут  , на який через тертя відхиляється від нормальної реакції N повна реакція R опорної поверхні (рис. 6.3, а), називається кутом тертя. З рис. 6.3, а видно, що
, на який через тертя відхиляється від нормальної реакції N повна реакція R опорної поверхні (рис. 6.3, а), називається кутом тертя. З рис. 6.3, а видно, що
 . (6.3)
. (6.3)
Але з формули (6.2) маємо, що
Отже,
 , або
, або  (6.4)
(6.4)
Тангенс кута тертя дорівнює коефіцієнту тертя ковзання. Інакше кажучи, кутом тертя називається кут, тангенс якого дорівнює коефіцієнту тертя ковзання.
Якщо тіло переміщати відносно опорної поверхні в різні боки, то лінія дії реакції  опише конічну поверхню (рис. 6.3, в), яка називається конусом тертя. Отже, конусом тертя називають поверхню, яку описує повна реакція в разі її обертання навколо нормальної реакції. Якщо коефіцієнт тертя під час руху тіла в різних напрямках однаковий, то повна реакція поверхні відхиляється від нормальної у всіх напрямках на однаковий кут тертя
опише конічну поверхню (рис. 6.3, в), яка називається конусом тертя. Отже, конусом тертя називають поверхню, яку описує повна реакція в разі її обертання навколо нормальної реакції. Якщо коефіцієнт тертя під час руху тіла в різних напрямках однаковий, то повна реакція поверхні відхиляється від нормальної у всіх напрямках на однаковий кут тертя  і конус тертя буде круглим з кутом при вершині А, який дорівнює 2
і конус тертя буде круглим з кутом при вершині А, який дорівнює 2  . Коли ж коефіцієнт тертя у різних напрямках різний (наприклад, у разі руху по дереву вздовж і поперек волокон), то конус тертя буде некруглим.
. Коли ж коефіцієнт тертя у різних напрямках різний (наприклад, у разі руху по дереву вздовж і поперек волокон), то конус тертя буде некруглим.
Для руху тіла необхідно, щоб рівнодіюча зовнішніх сил, що прикладені до нього, проходила за межами конуса тертя. Якщо ж рівнодіюча зовнішніх сил розташована всередині конуса тертя, то якою б вона великою не була, рух тіла неможливий, оскільки рушійна сила в цьому випадку завжди буде менша від сили тертя.
Дата добавления: 2016-06-15; просмотров: 3135;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
