Аналитическое представление проективных преобразований
Любое проективное преобразование однозначно определяется парой реперов R(Е1 , Е2 , Е3 , Е) и R′(Е′1 , Е′2 , Е′3 , Е′). Так как реперы заданы, тогда можно найти преобразование координат при переходе от одного репера к другому, т.е. можно найти матрицу А причем она не вырождена (почему?).
Формулы преобразования координат одной и той же точки Х будут:
λ ХR =A∙XR′ и μ XR′ = А-1 ∙ ХR (*)
Пусть f (Х) = Х ', причем ХR  и Х 'R′ .
и Х 'R′ .
Найдем координаты точки Х ' в репере R:λ Х 'R =A∙Х 'R′ .
Таким образом, λ Х 'R =A∙ХR , тогда μ Х = A-1 ∙f (Х) (**)
(Почему существует обратная матрица?)
Замечание: Хотя формулы (*) и (**) вроде бы одинаковые, необходимо помнить, что в (*) одна и та же точка в разных реперах, в (**) две разные точки (образ и прообраз) в одном репере.
Матрица, задающая преобразование координат для двух данных реперов R(Е1 , Е2 , Е3 , Е) и R′(Е′1 , Е′2 , Е′3 , Е′) единственна (с точностью до пропорциональности). Отсюда следует, что проективное преобразование задает единственную матрицу A (с точностью до пропорциональности).
Теорема. Если на Р2 задано отображение формулами (**), тогда это отображение является проективным преобразованием.
Доказательство. Пусть f : Р2 → Р2 , так что λ f (Х)=A∙Х.
Рассмотрим точки репера Е1 , Е2 , Е3 , Е , их образы обозначим
Е′1 , Е′2 , Е′3 , Е′. Необходимо и достаточно доказать что точки
Е′1 , Е′2 , Е′3 , Е′ образуют новый репер (т.е никакие три не лежат на одной прямой и он согласован).
Пусть матрица A =  ,тогда Е′1= f (Е1)= A·
,тогда Е′1= f (Е1)= A·  =
=  ,
,
Е′2= f (Е2)= A·  =
=  , Е′3=f(Е3)=A·
, Е′3=f(Е3)=A·  =
=  , Е′=f(Е)=A·
, Е′=f(Е)=A·  =
= 
Е′1 , Е′2 , Е′3 - не лежат на одной прямой, так как  ≠0 (почему?),
≠0 (почему?),
То же самое можно сказать о тройках: Е′1 , Е′2 , Е′, Е′1 , Е′3 , Е′, Е′2 , Е′3 , Е′.
Т.к., Е′1 + Е′2+ Е′3= Е′ - есть согласованность (проверьте).
Таким образом, f : R(Е1 , Е2 , Е3 , Е) → R′(Е′1 , Е′2 , Е′3 , Е′), а значит f - есть проективное преобразование. □
Вывод: Проективное преобразование однозначно определяется формулами (**), то есть матрицей A. Поэтому это тоже можно считать определением проективного преобразования.
Определение: Композицией двух проективных преобразований f : Х → Х′ и g : Х′ → Х′′ будем называть последовательное выполнение преобразований сначала f затем g.
Обозначение: f ◦ g
При этом f : R→ R′ и g : R′ → R′′ , значит f ◦ g : R → R′′, т.о., f◦g - проективное преобразование.
(почему?).
Пусть f задается матрицей A, а g задается матрицей В.
 Тогда f◦g(Х)=f(g(Х))=f(A·Х)=В(A·Х)=В·A·Х,
Тогда f◦g(Х)=f(g(Х))=f(A·Х)=В(A·Х)=В·A·Х,
таким образом матрицей преобразования f◦g является матрица В·A, причем она не вырождена. (почему?).
Определение: Преобразование, оставляющее все точки плоскости на месте, называется тождественным.
Тождественное преобразование задается матрицей – Е.
Определение: Обратным преобразованием для f : Х → Х′ будет преобразование f -1: Х′ → Х .

Если f : R → R′ ,
тогда f -1 : R′ → R.
f -1 - проективное преобразование (почему?).
f -1 будет задаваться - А-1 (почему?).
Теорема. Множество П - проективных преобразований является группой относительно операции композиция.
Доказательство. Самостоятельно.
Теорема. Проективное преобразование прямой образует подгруппу в группе проективных преобразований - П.
Доказательство. Самостоятельно.
Виды проективных преобразований:
1. Инволюция – нетождественное проективное преобразование , совпадающее со своим обратным: f = f -1.
2. Коллинеация - проективное преобразование, при котором прямая переходит в прямую, точка переходит в точку.
3. Корреляция - проективное преобразование, при котором прямая переходит в точку, точка переходит в прямую.
4. Гомология - проективное преобразование, имеющее по крайней мере три неподвижных точки принадлежащие одной прямой.
5. Центральное проектирование.
Множество коллинеаций образует подгруппу в группе проективных преобразований. Подгруппа коллинеаций сама имеет несколько подгрупп. Эта идея («групповая») была положена в основу классификации геометрических преобразований Феликсом Клейном в 1872 году в работе «Сравнительное обозрение новейших геометрических исследований». Другое название этой работы - «Эрлангенская программа».
Геометрия – это учение о геометрических преобразованиях и каждая геометрия характеризуется соответствующей группой преобразований. Предметом геометрии являются те свойства фигур, которые инвариантны при преобразованиях данной группы.
 Евклидова геометрия изучает те свойства фигур, которые сохраняются при движениях - Д (длины, углы). Аффинная геометрия изучает те свойства фигур, которые сохраняются при аффинных преобразованиях - А (простое отношение точек, параллельность прямых). Проективная геометрия изучает те свойства фигур, которые сохраняются при проективных преобразованиях - П (сложное отношение точек, инцидентность, точка, прямая, пучок, репер, квадрики).
Евклидова геометрия изучает те свойства фигур, которые сохраняются при движениях - Д (длины, углы). Аффинная геометрия изучает те свойства фигур, которые сохраняются при аффинных преобразованиях - А (простое отношение точек, параллельность прямых). Проективная геометрия изучает те свойства фигур, которые сохраняются при проективных преобразованиях - П (сложное отношение точек, инцидентность, точка, прямая, пучок, репер, квадрики).
Д  А П
А П
Перспектива
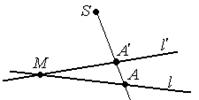
Определение: Центральной проекцией или перспективой прямой ℓ на прямую ℓ' из точки S называется отображение при котором каждой точке А прямой ℓ ставится в соответствие точка А'прямой ℓ' такая что А'= ℓ' ∩ (SА).
Свойства:
1. Перспектива является взаимнооднозначным отображением в силу того, что любые две прямые имеют одну и только одну общую точку.
2. При перспективе сохраняется сложное отношение четырёх точек лежащих на одной прямой (по свойствам сложного отношения).
3. Если обозначить ℓ ∩ ℓ' = М , тогда точка М отображается сама в себя, т.е. при перспективе прямой на прямую точка пересечения этих прямых переходит сама в себя.
Доказательство. Пусть М → М′ ≠ М,
по определению М ′=(SМ)∩ℓ ', но М  ℓ′
ℓ′  М = ℓ'∩(SМ). □
М = ℓ'∩(SМ). □
Теорема1. Для того, чтобы отображение прямой на прямую было перспективой необходимо и достаточно чтобы при этом отображении точка пересечения этих прямых переходила в себя.
Доказательство. Необходимость следует из свойства (3).
Достаточность:  φ: ℓ1 → ℓ2 и М : φ(М)=М, причем М= ℓ1∩ℓ2 .
φ: ℓ1 → ℓ2 и М : φ(М)=М, причем М= ℓ1∩ℓ2 .
Возьмем точки А1 , В1 ℓ1 , найдем φ(А1)=А2 и φ(В1)=В2 ℓ2 .
Таким образом φ : А1 , В1 , М → А2 , В2 , М , причем это отображение единственное, но (А1В1)∩(А2В2)=S - единственная точка. Отсюда следует, что существует перспектива прямой ℓ1 на прямую ℓ2 из точки S .
Так как отображение единственное - это и есть перспектива. □
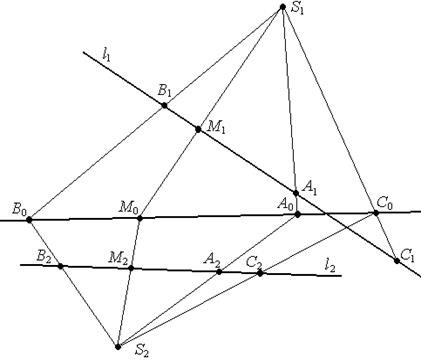
Теорема 2. Пусть даны две тройки точек: А1, В1, С1  ℓ1 и А2, В2, С2 ℓ2 , причем в каждой тройке точки различны, тогда
ℓ1 и А2, В2, С2 ℓ2 , причем в каждой тройке точки различны, тогда  φ : ℓ1 → ℓ2 , такое что φ(А1)=А2 , φ(В1)=В2 , φ(С1)=С2.
φ : ℓ1 → ℓ2 , такое что φ(А1)=А2 , φ(В1)=В2 , φ(С1)=С2.
Доказательство. Докажем построением. Возможны два случая.
1 случай: ℓ1 ≠ ℓ2 .
1. Проводим прямую (А1А2) и берем на ней две произвольные точки S1 и S2 отличные от А1 и А2 .
2. В0 =(S1В1)∩(S2В2), С0 =(S1С1)∩(S2С2), А0 =(В0С0)∩(S1S2),
3. Рассмотрим отображения φ1 : ℓ1 → (В0С0) - перспектива с центром S1 и φ2 : (В0С0) → ℓ2 - перспектива с центром S2, тогда искомое проективное преобразование φ = φ2 ◦ φ1 . так как φ1 и φ2 - проективные преобразования, то φ - тоже проективное преобразование.
4. М0 =(S1М1)∩(В0С0), М2 =(S2М0)∩ ℓ2 - образ точки М1.
2 случай ℓ1 = ℓ2 .
 1. Проводим произвольную прямую ℓ3 , берем произвольную т. S3 не инцидентную прямым ℓ1 и ℓ3 .
1. Проводим произвольную прямую ℓ3 , берем произвольную т. S3 не инцидентную прямым ℓ1 и ℓ3 .
2. А3=(S3А1)∩ ℓ3 ,
В3=(S3В1)∩ ℓ3 ,
С3=(S3С1)∩ ℓ3 .
3. Проводим прямую (А2А3) и берем на ней две произвольные точки S1 и S2 отличные от А2 и А3 .
4. С0 =(S1С3)∩(S2С2), В0 =(S1В3)∩(S2В2), А0 =(В0С0)∩(S1S2).
5. Рассмотрим отображения:
φ3 : ℓ1 → ℓ3 - перспектива с центром S3
φ1 : ℓ3 → (В0С0) - перспектива с центром S1
φ2 : (В0С0) → ℓ1 = ℓ2 - перспектива с центром S2,
тогда искомое проективное преобразование
φ = φ2 ◦ φ1 ◦ φ3 .
6. М3=(S3М1)∩ℓ3, М0 =(S1М3)∩(В0С0), М2 =(S2М0)∩ℓ1 .
Вывод: Проективное отображение прямой на прямую задается двумя тройками различных точек.
Вывод:Любое проективное отображение прямой можно разложить на композицию не более трех перспектив:
1. Если ℓ1 = ℓ2 - три перспективы.
2. Если ℓ1 ≠ ℓ2 - не более двух перспектив.
3. Если ℓ1 ≠ ℓ2 и (А1А2)∩(В1В2)∩(С1С2)= S - одна перспектива с центром в точке S.
Дата добавления: 2022-02-05; просмотров: 784;
Поиск по сайту
Узнать еще
- V. Представление и защита диссертации
- Алгебра линейных преобразований
- Алгебраическое представление двоичных чисел
- АЛГЕБРАИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ЛОГИЧЕСКИХ ФУНКЦИЙ
- Аналитическое выражение первого закона термодинамики
- Аналитическое выражение первого закона термодинамики
- Аналитическое исследование
- Аналитическое направление

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
