Дискретное позиционное управление отдельным приводом
Основной вариант алгоритма дискретного позиционного программного управления приводом соответствует структурной схеме следящей системы (см. рис. 4.1), которая последовательно отрабатывает заданные приращения управляемой выходной координаты qi. Эта схема может быть дополнена другими средствами коррекции, компенсирующими воздействия внешних возмущений и, прежде всего, нагрузки, торможением в точках позиционирования с помощью специального тормоза.
Синтез оптимального алгоритма управления при необходимости обеспечить максимальное быстродействие, как уже отмечалось в главе 6, приводит к релейному управлению. Однако поскольку такая система двухпозиционного релейного управления неустойчива в малом, при подходе к точкам позиционирования необходимо переходить на другой алгоритм управления. В результате получается система так называемого дуального управления с переменной структурой, показанная на рис. 7.2. Устройство управления непрерывного действия включается вблизи очередной точки
позиционирования, т. е. при малом рассогласовании Δq = q - q3 > а устройство релейного управления включается в момент подачи программного задания на очередной шаг и также при возникновении больших рассогласований, вызванных любыми причинами.. (Коммутирующий элемент КЭ на рис. 7.2 показан условно. Такой же алгоритм может быть реализован, например, с помощью управляемых ключей, осуществляющих нужного знака форсировку двигателя в соответствующие интервалы времени.)
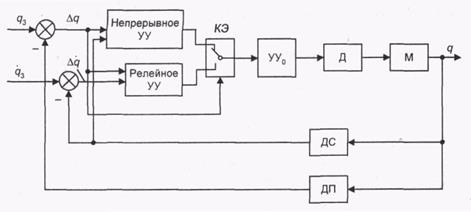
Рис. 7.2. Схема системы дуального управления приводом: КЭ — коммутирующий элемент
Рассмотрим алгоритмы релейного управления, а затем вернемся к каналу непрерывного управления. На рис. 7.3 показан процесс такого оптимального по быстродействию релейного управления электрическим приводом, описываемый 2 дифференциальными уравнениями первого порядка с ограничениями по входному напряжению и по движущему моменту, т. е. по току [23].
В соответствии с теорией оптимального управления оптимальный алгоритм процесса управления напряжением на входе привода состоит из 3 интервалов: на первом из которых предельное значение имеет момент двигателя Мд=Мдпр, на втором — напряжение на его входе (на якоре) u=uпр и на третьем — опять Мд, но уже с обратным знаком Мд=-Мд пр.
На рис. 7.3, а на фазовой плоскости сплошными линиями показаны оптимальные по быстродействию процессы движения при отработке задания ф3 при ограничении по движущему моменту Мд=См1. Они состоят из парабол, выходящих из начальных точек (φ3,0) на оси абсцисс, и общей параболы, описывающей этап торможения, — линии переключения. (Пунктиром показан процесс, соответствующий наличию ограничения еще и скорости. Напомним, что момент и скорость связаны механической характеристикой двигателя.)
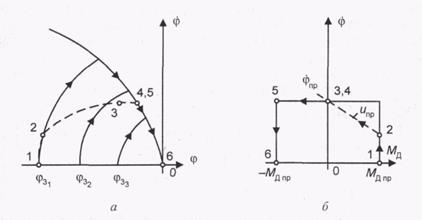
Рис. 7.3. Фазовые траектории (а) и механические характеристики (б) электропривода с релейным позиционным управлением: φ — угол поворота выходного вала двигателя; Мд— движущий момент; uпр — предельное значение напряжения на входе двигателя
Для двигателя постоянного тока с независимым возбуждением и управлением по напряжению на якоре ограниченные переменные связаны с напряжением на якоре известными выражениями:
 (7.1)
(7.1)
Здесь I — ток в цепи якоря двигателя, имеющий ограничение  , которое определяет предельное значение момента Мд≤Мдпр =СмIпр, где См — коэффициент электромагнитного момента;СЕ — коэффициент противо-э.д.с. двигателя, R — активное сопротивление цепи якоря двигателя.
, которое определяет предельное значение момента Мд≤Мдпр =СмIпр, где См — коэффициент электромагнитного момента;СЕ — коэффициент противо-э.д.с. двигателя, R — активное сопротивление цепи якоря двигателя.
Уравнение линии переключения выглядит так:
где  — функция переключения.
— функция переключения.
Для RIпр≤uпр
 (7.2)
(7.2)
где  , i — передаточное отношение редуктора привода, а JH и Jд—моменты инерции нагрузки и якоря двигателя.
, i — передаточное отношение редуктора привода, а JH и Jд—моменты инерции нагрузки и якоря двигателя.
Алгоритм управления двигателем представляет собой двухпозиционное релейное управление с входным сигналом ±uпр. Знак этого сигнала определяется знаком функции переключения (7.2). Ограничение тока при этом осуществляется с помощью обратной связи по току. При достаточно сильной этой связи ток, а, следовательно, и момент двигателя будут практически безинерционно следовать за входным напряжением и, реализуя режим моментного управления двигателем.
Отрезок 1—2 на рис. 7.3 соответствует этапу разгона с постоянным ускорением, т. е. с Мд=Мд пр; участок 2—3 — продолжение этапа разгона, но с и = uпр, когда с ростом противо-э.д.с. напряжение на якоре достигло своего предельного значения; 3—4 — этап движения с постоянной скоростью, который может возникать при достаточно большой длительности процесса разгона в прежнем режиме ограничения и; 4—5 — момент перехода к этапу торможения реверсированием тока якоря и соответственно момента; 5—6 — этап торможения при Mд= - Mд пр.
Дата добавления: 2022-02-05; просмотров: 636;
Поиск по сайту
Узнать еще
- D-триггер с динамическим управлением
- IV. 7. Управление состоянием окружающей среды на локальном уровне
- IX.2. Биотическое управление экосферой и роль деятельности человека
- Аварийное управление мощностью турбин электростанций
- АВАРИЙНОЕ УПРАВЛЕНИЕ ПС ОДНОЙ СЕКЦИИ.
- Автомаическое управление машинами циклического действия
- Автоматические системы с комбинированным управлением
- Автоматическое управление

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
