Сборочные робототехнические комплексы
Этот тип робототехнических комплексов по своему значению является, пожалуй, наиболее важным. Сборочные операции в машиностроении составляют до 40% себестоимости изделий, а в приборостроении ешё больше — до 50—60%. Вместе с этим степень автоматизации сборочных работ сегодня весьма низка в связи с ограниченными возможностями, которые имеют здесь традиционные средства автоматизации в виде специальных сборочных автоматов. Такие автоматы применимы главным образом в массовом производстве, в то время как, например, в машиностроении до 80% продукции относится к серийному и мелкосерийном) производству. Поэтому создание гибких сборочных комплексов на базе ПР является одним из основных направлений в автоматизации сборочных операций.
К сборочным операциям относятся механическая сборка, электрический монтаж, микроэлектронная сборка. Процесс сборки состоит из следующих последовательных взаимосвязанных операций:
· загрузка собираемых деталей в загрузочные и транспортные устройства (обычно с их ориентацией);
· перемещение деталей к месту сборки;
· базирование, т. е. фиксация в строго определенной позиции, с ориентацией деталей на сборочной позиции;
· собственно операция сборки, т. е. сопряжения деталей, включая часто закрепление;
· контрольно-измерительные операции в ходе сборки;
· удаление собранного узла со сборочной позиции для перемещения его на следующую позицию, если сборка не закончена.
На рис. 15.1 показан участок одного из первых отечественных робототехнических сборочных комплексов массового производства механических наручных часов на базе специальных ПР, относящийся к п. 2 приведенной классификации. На прямоточной транспортной системе закреплено приспособление-спутник, которое перемещается от позиции к позиции по прямой линии с фиксацией через равные промежутки времени.
Сборка осуществляется по принципу параллельно-последовательной сборки на всех позициях одновременно с последующим перемещением приспособления-спутника на очередной шаг. Установка оснащена специальными пневматическими ПР с приспособлениями, сменяемыми в зависимости от марки собираемых часов.
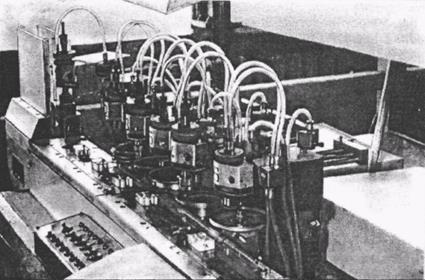
Рис. 15.1. Робототехническая сборочная линия массового производства наручных часов
На рис. 15.5 показан один из первых робототехнических комплексов, осуществляющих сборку на одном рабочем месте такого достаточно сложного изделия, как пылесос. Комплекс смонтирован на сборочном столе и включает 2 электромеханических манипулятора (1, 2) с 8 степенями подвижности (первый (силовой) работает в вертикальной плоскости, а второй — в горизонтальной) и 7 телевизионных камер. 3 из них (α, β, γ) ориентированы вертикально, а 4 (А, В, С, D) — горизонтально. Захватное устройство горизонтального манипулятора снабжено датчиками тактильными, усилия и давления. Пылесос 3 собирается из 3 узлов: фильтра 4, электродвигателя 5 и корпуса 6, которые поступают на сборку неориентированными.
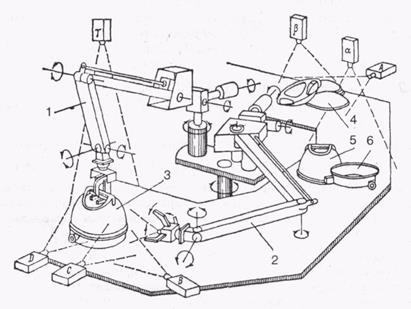
Рис. 15.5.Робототехнический комплекс для сборки пылесосов1 фирмы "Хитачи" (Япония)
Близки к сборочным роботам и часто применяются вместе с ними роботы для контроля размеров — измерительные машины. Их рабочим органом является измерительный щуп, которым производится ощупывание контролируемого изделия в нужных точках. Обычно такие измерительные машины имеют прямоугольную систему координат и ЧПУ, обеспечивающее точность до единиц микрометров. На рис. 15.6 показан пример измерительной машины.
Дата добавления: 2022-02-05; просмотров: 991;
Поиск по сайту
Узнать еще
- Адаптивные комплексы
- Антивирусные программы и комплексы
- Вопрос 1. Комплексы крупного рогатого скота
- Глава III. ТОПОГРАФИЯ И СИМПТОМОКОМПЛЕКСЫ ПОРАЖЕНИЙ СПИННОГО МОЗГА
- Глава VI. ТОПОГРАФИЯ И СИМПТОМОКОМПЛЕКСЫ ПОРАЖЕНИЙ МОЗГОВОГО СТВОЛА
- Глава VIII. КОРА ГОЛОВНОГО МОЗГА, СИМПТОМОКОМПЛЕКСЫ ПОРАЖЕНИЯ
- Глава VIl. ПОДКОРКОВЫЕ ГАНГЛИИ, ВНУТРЕННЯЯ КАПСУЛА, СИМПТОМОКОМПЛЕКСЫ ПОРАЖЕНИИ
- Зубцы, сегменты, интервалы и комплексы на ЭКГ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
