Особенности непрерывного (контурного) управления роботами
Типичные роботы с непрерывным, т. е. контурным управлением — это промышленные роботы для дуговой сварки и резки, для нанесения покрытий. На рис. 8.1 и 8.2 показаны примеры таких роботов. Их главное отличие от роботов с дискретным позиционным управлением заключается в непрерывном движении рабочего органа манипулятора по траектории. Сама программная траектория при этом может задаваться и в виде дискретной функции времени, т. е. последовательности точек. Важно, что рабочий орган должен проходить эти точки без остановок, как это происходит при дискретном позиционном управлении.
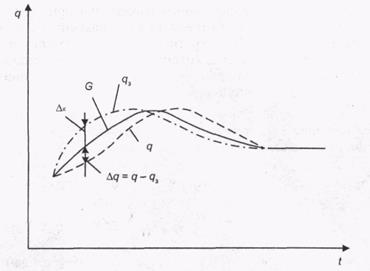
Рис. 8.3. Динамическое запаздывание q(t) при отработке программной траектории q3(t)
Управляющую программу можно находить и экспериментально методом обучения на реальном роботе. Существуют два способа такого обучения. Первый — путем непрерывного перемещения рабочего органа манипулятора рукой оператора с записью сигналов с датчиков обратной связи приводов. Для того чтобы двигатели манипулятора не препятствовали этому, его конструкция должна предусматривать возможность их отсоединения от механической системы манипулятора (с сохранением соединения с ней датчиков обратной связи).
Другой способ основан на последовательной установке рабочего органа с помощью приводов в точках, заранее выбранных на программной траектории с записью показаний датчиков обратной связи приводов, как при программировании систем дискретного позиционного управления. Затем для формирования заданной траектории между этими точками при воспроизведении запрограммированного движения используется интерполятор. Необходимая динамическая коррекция при программировании таким методом обучения также подбирается экспериментально, путем многократного пробного воспроизведения требуемой траектории за заданное время.
Второй путь уменьшения динамической ошибки — это повышение быстродействия самой системы автоматического управления введением в нее динамической коррекции, которая будет формироваться непосредственно в ходе отработки подаваемой на вход системы требуемой программной траектории. Конечно, этот путь значительно сложнее, поскольку мы игнорируем априорное знание подлежащей реализации траектории, но зато он упрощает программирование робота, сводя его только к кинематическому синтезу программной траектории для приводов.
В целом различают 2 варианта программирования систем непрерывного (контурного) управления — кинематическое и динамическое. Первый вариант соответствует малым скоростям движения рабочего органа, примерно менее 0,5 м/с, когда динамической погрешностью отработки программной траектории при имеющемся быстродействии системы управления можно пренебречь. Второй вариант относится к большим скоростям, когда необходимо вводить динамическую коррекцию в управляющую программу, т. е. при аналитическом ее расчете решать обратную задачу динамики, а не кинематики как в первом случае.
Развитием описанных выше способов программирования методом обучения стало применение в них современных способов управления манипуляторами человеком-оператором (см. главу 10). Так, программирование путем перемещения рабочего органа манипулятора рукой оператора может осуществляться с помощью трехстепенной задающей рукоятки, которая укрепляется на время программирования на рабочем органе манипулятора. Оператор, смещая эту рукоятку с нейтрального положения в нужном направлении, осуществляет перемещение рабочего органа манипулятора, управляя с помощью контактов задающей рукоятки приводами манипулятора через его устройство управления. В таком варианте этот способ программирования применим ко всем манипуляторам и не требует отсоединения двигателей приводов как в его исходном варианте.
Способ программирования обучением путем управления приводами манипулятора через его устройство управления (обычно с помощью переносного пульта) состоит в следующем. На время программирования на рабочий орган манипулятора укрепляется передающая телевизионная камера, дающая крупным планом на экран персонального компьютера изображение объектов внешней среды, с которыми манипулятор должен взаимодействовать. Управление манипулятором осуществляется через компьютер с помощью мыши или такой же задающей рукояткой, как в предыдущей системе. Преимущество этого варианта системы программирования — в значительно большем быстродействии и точности.
Дата добавления: 2022-02-05; просмотров: 530;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- I. Специфические особенности процесса воспитания в сравнении с процессом обучения.
- II.1.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.1.4. ОСОБЕННОСТИ РАЗВИТИЯ ПОЗНАВАТЕЛЬНОЙ СФЕРЫ У ДЕТЕЙ С НАРУШЕНИЯМИ СЛУХА
- III.1.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.2.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.3.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ
- III.4.5. ОСОБЕННОСТИ РАЗВИТИЯ ЛИЧНОСТИ И ЭМОЦИОНАЛЬНО-ВОЛЕВОЙ СФЕРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
