Понятие механической характеристики двигателя и механизма
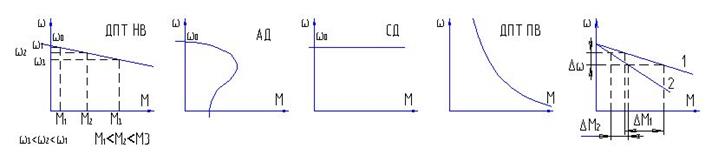
Статической механической характеристикой двигателя называется зависимость скорости от момента двигателя. w=¦(М). Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится ко всем обычным электродвигателям, применяемым в промышленности, то есть к двигателям постоянного тока независимого, последовательного и смешанного возбуждения, а также к асинхронным бесколлекторным и коллекторным двигателям переменного тока. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью их механических характеристик.
Жесткость механической характеристики электропривода – это отношение приращения момента, развиваемых электродвигательным устройством, при изменении скорости, к соответствующей разности угловых скоростей электропривода:
Обычно на рабочих участках механические характеристики двигателей имеют отрицательную жесткость β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
β = 
Жесткость механической характеристики в геометрическом смысле – это наклон механической характеристики двигателя.
Если сравнить характеристики 1 и 2, то характеристика 1 более мягкая, т.к. наклон ее меньше
DМ1>DМ2 Þ b1>b2, так как  и
и  .
.
Механические характеристики электродвигателей можно разделить на четыре основные категории:
1. Абсолютно жесткая механическая характеристика ( β = ∞ ) — это характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис.1).
2. Жесткая механическая характеристика — это характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2 на рис.1).
Для асинхронного двигателя жесткость в различных точках механической характеристики различна. Между максимальными (критическими) значениями моментов в двигательном Мк,д и генераторном Мк,г режимах характеристика асинхронного двигателя имеет сравнительно большую жесткость.
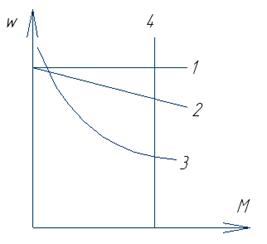 3. Мягкая механическая характеристика — это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
3. Мягкая механическая характеристика — это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
Двигатели постоянного тока смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от значения жесткости механической характеристики.
4. Абсолютно мягкая механическая характеристика (β=0) — это характеристика, при которой момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря (прямая 4 на рис. 2).
Механическая характеристика рабочей машины – это зависимость скорости рабочей машины от момента сопротивления, который она создает w=¦(Мс).
Механические характеристики описывают нагрузку на электропривод.
Классификация типовые нагрузок:
1. активный момент сопротивления Мс=const
Пример: привод лебедки подъемного крана.
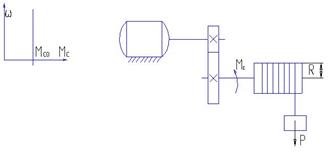
Нагрузка способна сама приводить в действие механизм, поэтому ее называют активной. Конструкции необходимо предусмотреть стояночный тормоз.
2. реактивный момент сопротивления Мс=const (нагрузка типа постоянства момента)
Характерно для механизмов типа "сухого трения".
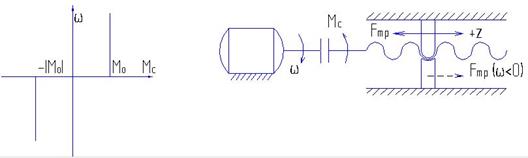
Мс=М0sign(w).
w>0 Þ Мс>0; w<0 Þ Мс<0.
Реактивный момент является реакцией на скорость w.
3. вязкое трение
Мс= α в.т ω
Момент сопротивления пропорционален скорости.
Нагрузка характерна для вязких сред.
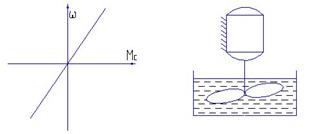
bвт – коэффициент вязкого трения.
4. вентиляционный момент
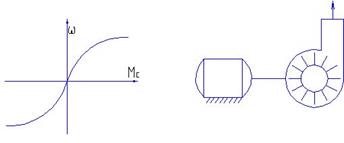
Мс=kw2sign(w).
Характерно для центробежных вентиляторов и насосов.
Если закрыть входное отверстие уменьшится момент нагрузки.
P=Mcw - мощность.
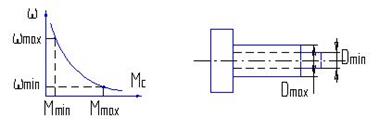
5. постоянство мощности P=const
 , где Рс =const.
, где Рс =const.
Часто используется для главных приводов станочных механизмов (токарных, фрезерных, расточных, шлифовальных и других станков).
wmax∙Mmin=wmin∙Mmax=const.
Рассмотрим токарную обработку:
w= const, Fp= const.

Для строгального станка:
Р1=vmin∙Fmax – рабочий ход, Р1=vmax∙Fmin – холостой ход.
Р1»Р2=const.
Особенности выбора двигателя:
При P1=5 кВт получим Pдв=5∙100=500 кВт.
Непосредственный выбор двигателя по предельным показателям приводит к завышению установленной мощности двигателя в Dw раз, где Dw – диапазон регулирования скорости. На самом деле мощность двигателя может быть снижена специально, выбором диапазона регулирования скорости.
Для ДПТ НВ – это управление скоростью по токам возбуждения.
Дата добавления: 2017-05-02; просмотров: 1748;
Поиск по сайту
Узнать еще
- I. Выборы: понятие, значение и виды.
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- I. Понятие политического лидерства.
- I. Понятие политической власти.
- I. Понятие, происхождение и признаки государства.
- I.3.3 МЕХАНИЧЕСКАЯ ЭНЕРГИЯ. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
- II. Обратная аффирентная связь. Понятие о РК.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
