Типы и характеристики вычислительных систем
Вычислительная система, реализующая модель коллектива вычислителей, может быть представлена как совокупность вычислительных ресурсов (т.е. вычислительных комплексов или отдельных ПВМ), соединенных между собой каналами связи и предназначенных для совместной обработки информации (заданий, заявок, процессов и др.). Такую вычислительную систему называют также машинным комплексом или машинной сетью. Каждая ПВМ машинной сети должна иметь высокую надежность в работе, небольшие габариты, малую стоимость и необходимые каналы связи для подключения к машинной сети.
Основной отличительной особенностью вычислительных систем (ВС) являетсястепень однородности ее аппаратно-программных средств (ресурсов) и выполняемых заданий.
Под однородностью системы понимается однотипная структура вычислительных средств (ресурсов) и идентичность характеристик заданий (по сложности, типу решаемых задач, времени решения и т.д.). Чем больше степень однородности, тем проще устройство ВС и технологичнее ее изготовление.
По степени однородности все существующие ВС можно разделить на два основных класса: параллельные ВС и распределенные ВС.
Параллельная вычислительная система (ПВС) представляет собой однородную систему массового распараллеливания, включающую совокупность однородных вычислительных ресурсов, соединенных между собой каналами связи и предназначенных для совместной параллельной обработки однородной информации.
Распределенная вычислительная система (РВС) является существенно неоднородной ВС и представляет собой совокупность территориально рассредоточенных разнотипных вычислительных комплексов, объединенных между собой коммуникационными каналами связи и предназначенных для совместной обработки неоднородной информации (рис.1.1). В составе РВС могут быть супер-ПВМ, содержащие сотни и тысячи процессоров, сети рабочих станций, мультипроцессорные, встроенные и другие вычислительные системы.
Сравнительные характеристики ПВС и РВС представлены в табл. 7.1.
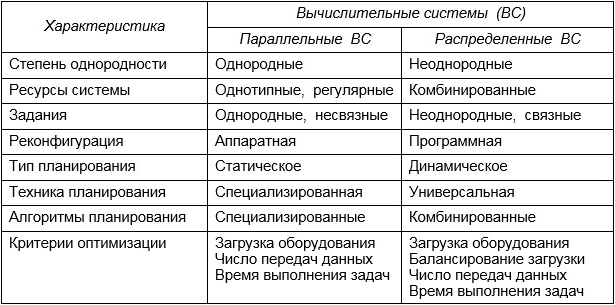
Табл. 7.1. Сравнительные характеристики вычислительных систем
В отличие от ПВС, РВС является принципиально неоднородной системой как по своей структуре, так и по совокупности ресурсов, предоставляемых поступающим на вход системы заданиям. С этой точки зрения ПВС может рассматриваться как частный случай РВС с однородной структурой ресурсов и заданий. Это означает, что алгоритмы функционирования ВС, разработанные для неоднородной РВС, будут работать и в однородной ПВС, хотя и не так эффективно, как специализированные алгоритмы, разработанные специально для ПВС.
В настоящее время созданы конвейерные, матричные, программируемые и другие типы ПВМ. Они существенно отличаются как по функциональной структуре, так и по типу вычислительного процесса. Задания также отличаются по сложности, типу решаемых задач, времени решения и тоже являются неоднородными. Поэтому подавляющее большинство существующих ВС являются неоднородными.
Основными характеристиками РВС являются:
- неоднородность структуры ресурсов и заданий;
- распределенность вычислительных средств;
- асинхронный режим управления;
- возможность реконфигурации системы при выходе из строя ее компонентов и др.
Различают три типа РВС:
- вполунеоднородных РВС неоднородными являются либо ресурсы, либо задания;
- в неоднородных РВСи задания и ресурсыявляются неоднородными, поэтому любое назначение "задание-ресурс" является возможным (различны лишь времена выполнения заданий и времена коммуникаций);
- в строго неоднороднойРВСимеет место понятие совместимости ресурса с заданием, когда некоторые назначения "задание-ресурс" могут быть несовместимыми (невозможными).
В неоднородных РВС, в отличие от однородных ПВС, задача распределения заданий между ресурсами играет особую роль, поскольку каждое задание можно выполнить только на некоторых, а не на всех ресурсах. Поэтому ресурсы системы могут быть не сбалансированы по нагрузке и могут иметь место конфликтные назначения, в результате выполнения которых некоторые ресурсы могут простаивать. РВС может компенсировать эти потери времени за счет перераспределения (выравнивания) нагрузки между вычислителями путем динамической реконфигурации компонентов системы (раздел 9.4).
Дата добавления: 2023-01-28; просмотров: 1158;
Поиск по сайту
Узнать еще
- Виды и типы географических карт и атласов
- Головной мозг. Нервная система человека
- Действующая модель системы ориентации спутника на Солнце
- Динамический анализ. Продвижение разломов в сложных системах
- Дыхательная система человека. Частота дыхания
- Кости и суставы. Типы суставов
- Масштаб, проекция, системы координат
- Общий тип строения центральной нервной системы. Строение серого вещества спинного мозга

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
