Модель механической части электропривода
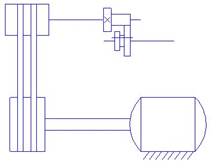
Кинематическая схема реального станка – это многомассовая модель.
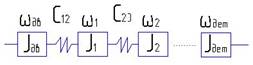
С12 и С23 – конечные жесткости элементов кинематики.
М – электромагнитный момент двигателя.
Мс – момент сопротивления.
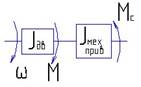
Ограничимся упрощенной многомассовой моделью, в которой необходимо привести все массы к одной скорости, как правило, скорости движения двигателя.
Правило знаков: положительное направление выбирается произвольно, но только один раз и только для одной из переменных, обычно это скорость двигателя ω.
Для Мдв положительное направление совпадает с положительным направлением w, а для Мс это направление считается отрицательным.
Движение одномассовой модели описывается уравнением:
 - основное уравнение движения двигателя.
- основное уравнение движения двигателя.
 , где
, где  ,
,  ,
, 
Уравнение движения электропривода должно учитывать все силы и моменты, действующие в переходных режимах (это режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток).
Проведем аналогию с поступательным движением.
Уравнение движения при поступательном движении записывается так:
 (1)
(1)
где F – движущая сила, Fс – сила сопротивления двигателя.
Аналогично уравнение равновесия моментов, Н*м, для вращательного движения (уравнение движения привода) имеет следующий вид:
 (2)
(2)
Уравнение (2) показывает, что развиваемый двигателем вращающий момент М за вычетом момента сопротивления Мс на его валу обуславливает угловое ускорение  . Поэтому величину М - Мс назывют динамическим моментом.
. Поэтому величину М - Мс назывют динамическим моментом.
Из анализа уравнения (2) видно:
1) при M > Mc  , т.е. происходит ускорение привода (w – увеличивается);
, т.е. происходит ускорение привода (w – увеличивается);
2) при M < Mc  , т.е. происходит замедление привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя; w – уменьшается)
, т.е. происходит замедление привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя; w – уменьшается)
3) при M- Mc = 0,  ; то есть привод работает в установившемся режиме (w = const)
; то есть привод работает в установившемся режиме (w = const)
Вращающий момент, развиваемый двигателем при работе, принимается положительным, если он направлен в сторону положительного направления скорости движения привода. Если он направлен в сторону обратную положительного направления скорости, то он считается отрицательным.
Дата добавления: 2017-05-02; просмотров: 1616;
Поиск по сайту
Узнать еще
- Cпособы получения частиц порошков
- I. Ходовые части вагонов
- I.3.3 МЕХАНИЧЕСКАЯ ЭНЕРГИЯ. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
- II. Участие Республики Казахстан в международных договорах
- Інтерпретація простого і частинного коефіцієнтів кореляції
- Інформація та документація. Керування документаційними процесами. Частина 1. Основні положення.
- А и Б – базы механической обработки
- Абсцесс, флегмона подкожножировой клетчатки переднего отдела подподъязычной части шеи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
