Структурная схема автоматизированного электропривода.
Структурная схема автоматизированного электропривода приведена на рис.1. В ней можно выделить три основных элемента:
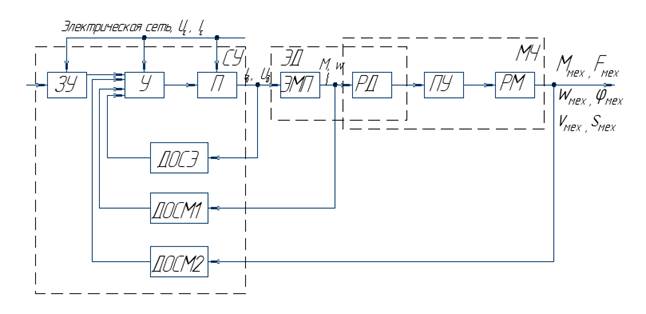
Рис.1 Структурная схема автоматизированного электропривода
1) механическая часть привода МЧ, включающая рабочий механизм РМ, передаточное устройство ПУ, предназначенное для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины и для изменения вида и скорости движения и усилия (момента вращения);
2) электродвигательное устройство ЭД, предназначенное для преобразования электрической энергии в механическую или механической энергии в электрическую. На схеме электродвигательное устройство (или двигатель) представлено двумя элементами: электромеханическим преобразователем энергии ЭМП (на вход которого подаются электрические сигналы в виде напряжения и тока), преобразующим электрическую мощность в механическую мощность, и массой ротора двигателя РД, на которую воздействует момент М двигателя при угловой скорости w;
3) система управления СУ, состоящая из силовой преобразовательной части Я (преобразователя), управляющего устройства У, задающего устройства ЗУ и датчиков обратных связей — электрических ДОСЭ и механических ДОСМ1 и ДОСМ2. Преобразователь Я предназначен для питания двигателя и создания управляющего воздействия на него. Он преобразует род тока или напряжение, или частоту либо изменяет иные показатели качества электрической энергии, подводимой к двигателю. Устройство У, управляющее преобразователем П, получает командные сигналы от задающего устройства ЗУ, а информацию о текущем состоянии электропривода и технологического процесса -от датчиков обратных связей. С помощью этих датчиков ток, напряжение, мощность двигателя или другие его электрические параметры, скорость, момент или усилие и положение (перемещение) исполнительного органа, преобразуются в пропорциональные этим параметрам электрические сигналы, которые и подаются в управляющее устройство У. В нем текущее состояние электропривода и технологического процесса сравнивается с заданным и при наличии рассогласования вырабатывается управляющий сигнал, воздействующий через преобразователь П на электропривод в направлении устранения возникшего рассогласования с требуемой точностью и быстродействием.
Дата добавления: 2017-05-02; просмотров: 2691;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- II. Функционально-структурная организация и программное обеспечение персонального компьютера
- II. Электрическая схема и принцип действия.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pис. 2.23. Схема межсистемных венозных анастомозов (схема).
- V. Упрощенная схема замещения трансформатора и внешняя характеристика.
- А – схема структурная; б – схема эквивалентная
- Агрегація криптографічних перетворень, криптографічна схема

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
