Системы с совместным управлением вентильными группами реверсивного ТП
Системы с совместным управлением подразделяются на два типа:
1. Системы с одноканальным управлением, или системы с жестким однозначным согласованием углов управления реверсивных групп a1 и a2;
2. Системы с двухканальным управлением, или системы с автоматическим регулированием уравнительного тока.
В одноканальных системах имеется лишь один канал управления, по которому осуществляется одновременное воздействие на углы управления обеих вентильных групп. При этом обеспечивается однозначное жесткое соответствие между углами управления a1 и a2 групп, т.е. каждому значению угла управления первой группы a1 соответствует строго определенное значение угла управления другой группы a2. Соотношение между углами a1 и a2 определяется принятым законом согласования, характеристиками системы управления и ее настройкой.
В двухканальных системах имеются два отдельных канала управления. Один из каналов воздействует на работающую группу вентилей и тем самым определяет основной режим работы электропривода. Другой канал управления воздействует на неработающую группу вентилей и служит для регулирования величины уравнительного тока. Поэтому двухканальные системы управления называют также системами с автоматическим регулированием уравнительного тока.
Одноканальные системы управления ТП:
1.Системы с безлюфтовым сопряжением механических характеристик.Дляобеспечения безлюфтового перехода из двигательного режима в тормозной (генераторный) необходимо, чтобы скорость холостого хода двигателя при подходе к ней со стороны двигательного режима wх.х.дв равнялась скорости холостого хода при подходе к ней со стороны тормозного режима wх.х.т:
wх.х.дв = wх.х.т. (13)
Так как wх.х.дв = Ud вх./ ce ,то
wх.х.т = Ud их./ ce , (14)
где Ud вх - напряжение холостого хода выпрямительной группы;
Ud их - напряжение холостого хода инверторной группы.
Из соотношений (13) и (14) следует, что для получения безлюфтового сопряжения характеристик необходимо, чтобы напряжения холостого хода выпрямительной и инверторной групп были равны по величине. Если не учитывать области прерывистого тока, т.е. считать индуктивность в якорной цепи двигателя бесконечно большой, то для равенства
Ud их = Ud вх
должно выполняться условие
Ed0 cos aв - dUв = - Ed0 cos a и + dUв . (15)
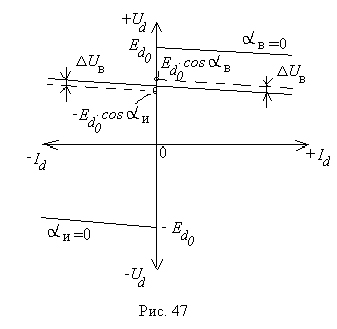
Из этого условия находится связь между углами управления выпрямительной aви инверторной aи групп вентилей:
cos aв+ cos aи = (2dUв / Ed0 ) = 2e
или
cos aв= - cos aи + 2e = cos bи + 2e, (16)
где относительное падение напряжения на вентиле
e = dUв / Ed0 . (17)
Из соотношения (15) с учетом того, что b = p - a , получаем
Ѕcos aвЅ> Ѕcos aиЅ= cos bи или bи > aв; (18)
и aв+ aи < 180° или a1 + a2 < 180°. (19)
Согласование характеристик выпрямительной и инверторной групп в соответствии с условиями (13) ё (18) называют нелинейным (несимметричным) согласованием без люфта.
В нулевом (начальном) положении командного органа управляющее напряжение UУ0, подаваемое в СИФУ ТП, равно нулю. В силу симметрии углы управления первой a1 и второй a2 вентильных групп при этом должны быть одинаковыми, т.е. a0 называют углом начального рассогласования характеристик,
a1 = a2 =a0 (20)
Из соотношений (19) и (20) следует, что при безлюфтовом согласовании характеристик
a0 = a1 = a2 < 90°,
т.е., когда двигатель неподвижен, обе вентильные группы работают в выпрямительном режиме.
Далее, из соотношения (15) и (18) вытекает, что при работе привода
Edв = Ed0 cos aв > Ed0 cos bи = Edи ,
т.е. ЭДС выпрямительной группы больше ЭДС инверторной группы.
Таким образом, при безлюфтовом согласовании характеристик в уравнительном контуре всегда есть постоянная составляющая выпрямленного напряжения, действующая в проводящем направлении вентилей. Эта постоянная составляющая равна разности ЭДС выпрямительной и инверторной групп, расходуется на покрытие падения напряжения в вентилях и активном сопротивлении контура уравнительного тока Rу.экв . Последнее состоит из активного сопротивления обмоток трансформатора Rт , уравнительных дросселей Rу.др и эквивалентного сопротивления коммутации:
Rу.экв = Rт + Rу.др + (xтр mn / 2p ).
Так как Rу.экв очень мало, то даже при небольшом отклонении ЭДС от соотношения (15) может появиться большая постоянная составляющая уравнительного тока. Такой режим работы практически может быть устойчивым только в замкнутой системе управления, когда контролируются токи в каждой вентильной группе.
Поэтому в реальных условиях в одноканальных системах управления согласование характеристик вентильных групп производится не в соответствии с соотношениями (15), (16), а из условия
cos a1 + cos a2 < (2 dUв / Ed0 ),
которому соответствуют большие значения ЭДС инверторной группы, и следовательно, меньшие значения уравнительного тока.
2.Линейное (симметричное) согласование.На практике довольно часто применяется так называемое линейное, или симметричное, согласование работы реверсивных групп в соответствии с законом
a1 + a2 = 180° или a1 = b2 . (21)
В этом случае ЭДС выпрямительной группы равна ЭДС инверторной группы:
Edв = Edи
и постоянная составляющая выпрямленного напряжения в уравнительном контуре равна нулю.
Из-за падения напряжения в вентилях напряжения холостого хода выпрямителя Udв и инвертора Udи при данном способе согласования оказываются уже неравными:
Udв = Ed0 cos aв - dUв < Ed0 cos b и + dUв = Udи .
Вследствие этого скорость идеального холостого хода в двигательном режиме wх.х.дв оказывается меньше скорости идеального холостого хода в режиме рекуперативного торможения wх.х.т (рис.48):
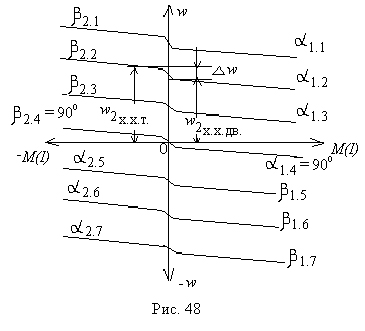
wх.х.дв = Udв / ce = (Ed0 cos aв - dUв )/ce < (Ed0 cos bи + dUв )/ce ==Udи / ce=wх.х.т , (22)
Из рассмотрения рис.48 и соотношения (22) следует, что при изменении знака момента нагрузки электродвигатель начнет развивать тормозной момент лишь после того, как его скорость после предшествующего двигательного режима возрастет на величину
dw = wх.х.т - wх.х.дв = 2dUв/ ce . (23)
Таким образом, при переходе из двигательного режима в режим рекуперативного торможения будет иметь место скачок скорости, т.е. при линейном согласовании не обеспечивается безлюфтовое сопряжение характеристик.
Величина изменения скорости, определяемая для электроприводов с разомкнутой системой управления выражением (23), прямо пропорциональна величине падения напряжения в вентилях. Для тиристоров это падение напряжения составляет всего 1…2 В. Поэтому в реверсивном тиристорном электроприводе при линейном согласовании характеристик вентильных групп изменения скорости оказываются небольшими, т.е. данный способ обеспечивает согласование характеристик, близкое к безлюфтовому.
В реальных установках с конечной величиной индуктивности в цепи выпрямленного тока (Lнагр № Ґ) при очень малых моментах на валу благодаря наличию уравнительных токов через якорь двигателя протекает знакопеременный прерывистый ток и изменение скорости dw происходит не резким скачком, а в некотором конечном интервале изменения момента. Этот интервал соответствует области прерывистого тока якоря. Действительная скорость идеального холостого хода wх.х при этом определяется средним значением между wх.х дв и w.хт.
В электроприводах с замкнутыми системами управления с обратной отрицательной связью по скорости и коэффициентом усиления, равным к, изменение скорости при переходе из двигательного режима в тормозной будет в (1+к) раз меньше, т.е. для электропривода это изменение скорости будет совершенно незаметно.
Линейное согласование вентильных групп в соответствии с соотношением (21) не представляет больших технических трудностей, что является одним из его достоинств.
3.Уравнительный ток в ТП с совместным управлением. Из-за равенства средних значений ЭДС выпрямительной и инверторной групп при линейном (симметричном) согласовании постоянная составляющая выпрямленной ЭДС в уравнительном контуре равна нулю. Однако сумма мгновенных значений ЭДС в этом контуре не равна нулю и вызывает протекание уравнительного тока, имеющего пульсирующий характер.
На рис.49 приведены кривые фазных ЭДС вторичной обмотки трансформатора ea, eb, ec и кривые мгновенных значений напряжения Uур и тока iур в уравнительном контуре для трехфазной нулевой перекрестной реверсивной схемы (см. рис.42) для значений углов управления aв1 = aн1 = 45° и aв2 = aн2 = 90°. (В целях упрощения коммутация тока показана мгновенной).
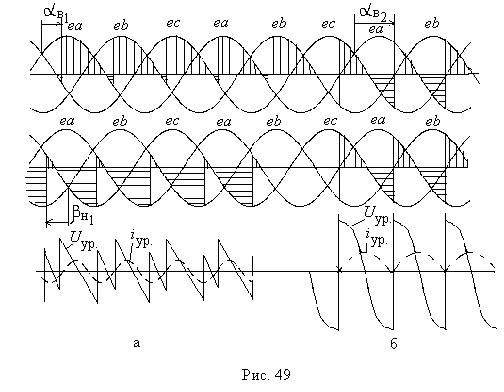
На рис.49 представлена работа электропривода при ходе «вперед», когда группа ТП-В (см.рис.42) работает в выпрямительном режиме, а группа ТП-Н - в инверторном. В этом случае через уравнительный дроссель 1ДУ протекает уравнительный iур и ток нагрузки Iя = Id ,а через 2ДУ-только уравнительный ток iур.
Как видно из рис.49,а уравнительное напряжение при линейном согласованном управлении не имеет постоянной составляющей. Его частота в 6 раз выше частоты сети.
В связи с односторонней проводимостью вентилей уравнительный ток должен иметь пульсирующий характер. Однако, рассматривая работу электропривода с совместным управлением, мы должны обратить внимание на то, что в схеме имеется три контура, по которым может протекать ток:
1) контур рабочего тока (ТП-В- якорь двигателя М);
2) контур уравнительного тока (ТП-В -1ДУ- ТПН- 2ДУ);
3) контур якорь двигателя - инверторная группа.
В третьем контуре при номинальных скоростях двигателя (когда ЭДС двигателя достаточно большая) через инверторную группу вентилей под действием Eя может протекать ток в те интервалы времени, когда мгновенные значения ЭДС работающих фаз трансформатора группы ТП-Н меньше величины Eя. При протекании этого тока работающий вентиль оказывается смещенным в прямом направлении. При этом появляется возможность протекания тока в уравнительном контуре при отрицательных значениях Uур.. Таким образом уравнительный ток iур. может стать знакопеременным, что и показано на рис.49,а.
При a = 90° ЭДС двигателя Eя близка к нулю. В этом случае ток в третьем контуре отсутствует. В уравнительном контуре протекает пульсирующий ток. Он содержит постоянную составляющую, несмотря на отсутствие таковой в уравнительном напряжении Uур..
В общем случае ток в уравнительном контуре определяется дифференциальным уравнением
(Lур. + 2Lф )diур. /dt + Rур. iур. = Uур. , (24)
где Lур.-суммарная индуктивность уравнительных дросселей;
Lф-индуктивность рассеяния фазы трансформатора;
Rур.-полное активное сопротивление уравнительного контура;
Uур.-мгновенное значение уравнительного напряжения, действующее в уравнительном контуре, Uур = ek1 + ek2 - 2dUв ,
здесь ek1, ek2 - мгновенные значения ЭДС предыдущей и последующей коммутируемых фаз в момент коммутации.
Уравнительный ток в установившемся режиме не превышает 10% от Idном.. Падение напряжения, создаваемое им на Rур. ,незначительно по сравнению с падением напряжения на индуктивностях, т.е. :
Rур. iур. << (Lур. + 2Lф ) diур. /dt .
Поэтому с достаточной степенью точности можно считать, что
(Lур. + 2Lф )diур. /dt » Uур. ,
откуда
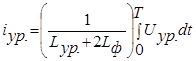 .
.
Среднее значение уравнительного тока Iур. определяется выражением
 ,
,
где Tур.-период уравнительного тока, совпадающий с интервалом дискретности тиристорного преобразователя, Tур. = (2p/mnwс).
Величина уравнительного тока зависит от напряжения вторичной обмотки питающего трансформатора ТП, схемы выпрямления и схемы соединения вентильных групп реверсивного ТП, от угла управления и способа согласования работы этих групп. При этом кривая уравнительного напряжения для многофазных схем может иметь довольно сложную форму.
Уравнительное напряжение в общем случае содержит постоянную составляющую и высшие гармонические. Постоянная составляющая Udур. определяет постоянную составляющую уравнительного тока только в том случае, если она положительна, т.е. направлена согласно с проводимостью вентилей. Постоянная составляющая Udур. положительна в тех случаях, когда ЭДС выпрямительной группы больше ЭДС инверторной группы, т.е.Udур. > 0 при
a1,2 < b 2,1 .
При симметричном (линейном) согласовании Udур = 0, a1,2 = b 2,1 .
Для практического расчета индуктивности уравнительных дросселей контура разработан графо-аналитический метод их расчета. Согласно этому методу рассчитывается эффективное значение уравнительного тока для различных схем по обобщенной формуле
Iур.эф. = E2max кэф. / wс Lур.S , (24)
где Е2max - амплитуда фазного напряжения трансформатора для нулевых схем различной фазности ,E2max = E2фmax;
E2max = E2лmax = Ц3 E2фmax - амплитуда линейного напряжения для 3- фазной мостовой схемы;
Lур. - суммарная индуктивность уравнительного контура, Lур.S = (Lур. + 2Lф),
кэф. - коэффициент действующего значения уравнительного тока, определяемый по кривым ( рис.50), где 1 - кф для 3-фазной встречно-параллельной схемы ; 2 - для 3-фазной мостовой перекрестной схемы ; 3 - для 3-фазной нулевой перекрестной схемы.
Коэффициент кэф. зависит от схемы выпрямления, угла управления вентилей a и способа согласования реверсивных групп.
Формула (25) и значения кэф., определяемые по графикам (см.рис.50) позволяют вычислить индуктивность уравнительных дросселей, необходимую для ограничения уравнительного тока до допустимых значений (обычно принимают Iур.эф. не выше 10% номинального тока).
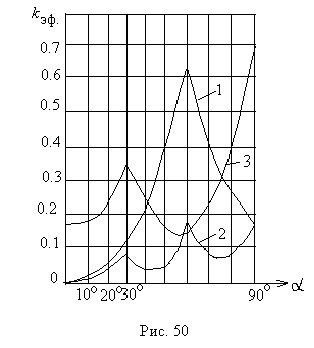
Lур. = (E2max кэф. / wс Iур.эф.) - 2Lф . (25)
Как уже было сказано, помимо контура рабочего тока Id и контура уравнительного тока, обусловленного действием ЭДС вторичных обмоток питающего трансформатора, в электроприводах с совместным управлением существует третий контур тока: якорь двигателя - инверторная группа - дроссель этой группы (например, 2ДУ). Составляющая тока в этом контуре тем больше, чем больше ЭДС двигателя, т.е. его скорость. Из-за наличия перечисленных ранее трех контуров в области малых нагрузок ток в якоре двигателя оказывается не прерывистым, как в электроприводах с однокомплектными преобразователями, а непрерывным и знакопеременным. Переменный характер тока якоря двигателя обусловлен тем обстоятельством, что в одни интервалы времени ЭДС группы ТП-В превышает встречно-направленную ЭДС двигателя. При этом проходят положительные импульсы тока якоря, а в другие интервалы ЭДС двигателя превышает ЭДС группы ТП-Н. В это время проходят отрицательные для якоря двигателя импульсы тока, т.е. в цепи якоря двигателя ток изменяет направление. Следовательно, и момент двигателя в течение периода оказывается знакопеременным. Благодаря возникающему при этом тормозному импульсу момента скорость двигателя в электроприводах с двухкомплектными преобразователями при совместном управлении с симметричным согласованием в области малых нагрузок резко не возрастает, т.е. благодаря уравнительным токам при совместном линейном согласованном управлении исключается неустойчивая зона прерывистых токов и механические характеристики становятся однозначными с плавным переходом из двигательного режима в режим рекуперативного торможения подобно характеристикам системы Г-Д.
Таким образом, в преобразователе отсутствует режим прерывистого тока, что позволяет рассматривать преобразователь и в области малых нагрузок как линейный источник питания с внешней характеристикой, описываемой уравнением (10).
Основными достоинствами тиристорных реверсивных электроприводов с совместным линейным согласованным управлением являются:
1. Благоприятные статические и динамические характеристики во всем возможном диапазоне изменения момента.
2. Сравнительная простота системы управления.
К недостаткам можно отнести:
1. Необходимость применения тяжелых громоздких и дорогих уравнительных дросселей. В некоторых случаях потребная индуктивность уравнительных дросселей в 5-7 раз превышает индуктивность сглаживающего дросселя, а масса уравнительных дросселей достигает (50-70)% от массы силового трансформатора.
2. Невозможность полного использования ТП по напряжению в выпрямительном режиме, т.к. угол управления никогда не может быть сделан равным нулю. Это связано с тем, что из-за необходимости одновременного выполнения условий обеспечения надежной коммутации инвертора (16) и условия симметричного согласования углов управления выпрямительной и инверторной групп (21) в системе управления должно существовать ограничение
a і amin = bmin.
3. Завышение мощности питающего трансформатора ТП. Невозможность получения amin = 0 заставляет увеличивать напряжение вторичной обмотки для получения требуемой величины выпрямленного напряжения.
4. Пониженное значение коэффициента мощности, т.к. ТП всегда оказывается зарегулированным. Это означает, что при завышенном напряжении вторичных обмоток трансформатора для получения нужной величины выпрямленного напряжения углы управления a приходится также завышать.
5. Уменьшение быстродействия электропривода, т.к. из-за большого значения индуктивности уравнительных дросселей возрастает электромагнитная постоянная времени якорной цепи двигателя.
6. Возможность появления больших бросков уравнительного тока во время переходных процессов из-за различного быстродействия перехода ТП из выпрямительного режима в инверторный, и из инверторного в выпрямительный.
Эти недостатки ограничивают применение подобных электроприводов следующими областями:
· системы регулирования положения(следящие электроприводы);
· грузоподъемные механизмы небольшой мощности;
· системы точного поддержания скорости;
· машины и механизмы со знакопеременным моментом.
4.Нелинейное (несимметричное) согласование с люфтом. Стремление освободиться от некоторых недостатков, присущих системам совместного управления с линейным согласованием, привело к развитию систем с нелинейным несимметричным согласованием. В основе их лежит требование, согласно которому ЭДС инверторной группы должна быть больше ЭДС выпрямительной группы:
Edи = Ed0 cos bи > Ed0 cos aв = Edв
Для этого необходимо, чтобы выполнялось условие a1 + a2 >180° или a1 > b2. При таком согласовании в цепи уравнительного тока имеется постоянная составляющая напряжения, направленная против проводимости вентилей. В результате уравнительный ток при любом уровне скорости оказывается прерывистым, а величина его получается меньшей, чем при линейном согласовании. Это позволяет снизить размеры уравнительных дросселей.
Недостатком систем с несимметричным согласованием является наличие нежелательной зоны нечувствительности или «люфта» в управлении. На рис.51,а приведена схема замещения реверсивного ТП с совместным управлением, а на рис.51,б показаны регулировочные характеристики при работе выпрямительной и инверторной групп на нагрузку с противо-ЭДС (на якоре двигателя) при нелинейном согласовании.
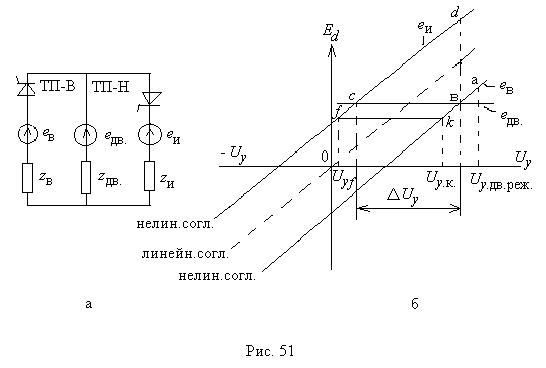
При работе электропривода в двигательном режиме eв > eдв. на величину падения напряжения в сопротивлениях якорной цепи:
eв - eдв. = Iя (zb +zдв.).
Этому режиму соответствует точка а регулировочной характеристики eв. Снижения скорости двигателя можно добиться, снизив UУ. При уменьшении UУ идет движение по регулировочной характеристике от точки а к точке в. В этой точке ЭДС преобразователя ТП-В eв становится равной ЭДС двигателя eдв., ток преобразователя равным нулю и вентили ТП-В выключаются. При этом, двигатель окажется в режиме свободного выбега и его скорость может снижаться только под действием момента нагрузки. Это связано с тем, что ЭДС инвертора при этом значении UУ будет превышать ЭДС двигателя (точка d) и держать вентили группы ТП-Н в закрытом состоянии. Тормозного режима двигателя не будет. При дальнейшем снижении UУ до точки с двигатель по-прежнему будет находиться в режиме свободного выбега. И только при дальнейшем снижении UУ eи становится меньше eдв. и включается преобразователь ТПН, работающий в инверторном режиме. Зона изменения UУ между точками в и с является зоной нечувствительности ( dUУ ).
В случае необходимости перехода на пониженную скорость при прежнем направлении вращения необходимо в тормозном режиме достичь точки f, изменяя UУ до значения UУ f,и установить управляющее напряжение, равное Uу.к.
Таким образом, управление электроприводом при несимметричном согласовании получается неоднозначным и в случае использования разомкнутых систем очень неудобным для оператора.
В замкнутых системах управления с общим коэффициентом усиления к величина зоны люфта dUУ уменьшается в (к+1) раз и отрицательные последствия неоднозначности характеристик при нелинейном согласовании сказываются незначительно.
Следует также отметить, что применение несимметричного согласования реверсивных вентильных групп позволяет уменьшить величину уравнительных токов по сравнению со значениями последних при симметричном согласовании только в установившихся режимах. Во время же переходных процессов броски уравнительного тока остаются и из-за меньшей величины индуктивности уравнительных дросселей могут оказаться даже большими, чем в электроприводах с линейным согласованием.
5.Двухканальные системы управления реверсивными ТП. В отличие от одноканальных систем, которые могут быть реализованы как в разомкнутых системах с ручным управлением, так и в замкнутых системах по той или иной координате автоматического управления тиристорного электропривода постоянного тока (по току якоря, напряжению ТП, по ЭДС двигателя, по частоте вращения двигателя), двухканальные системы относятся к замкнутым системам регулирования определенной координаты электропривода - тока якоря двигателя постоянного тока (Iя) и уравнительного тока (Iу.т ) в уравнительном контуре двухкомплектного реверсивного электропривода с совместным управлением комплектами вентилей.
На рис.52 показана структурная схема двухканальной системы регулирования тока якоря и уравнительного тока ТП.
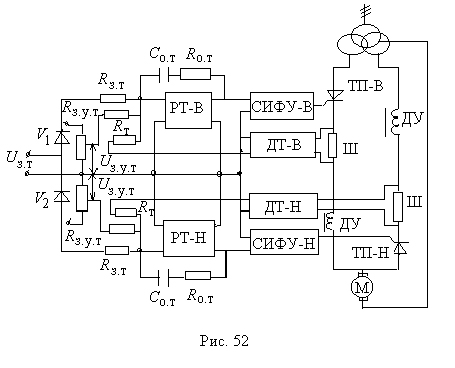
Схема содержит два отдельных канала регулирования и измерения тока. Каждый из каналов состоит из датчика тока ДТ-В (ДТ-Н), регулятора тока РТ-В (РТ-Н) и системы импульсно- фазового управления СИФУ -В (СИФУ -Н) и управляет соответствующей вентильной группой ТПВ (ТПН). На вход каждого канала подаются два задающих сигнала: уравнительного тока Uз.у.т и тока двигателя Uз.т. Сигнал задания тока двигателя поступает от предшествующих элементов системы управления (от регулятора скорости или ЭДС). Он определяет режим работы электропривода - величину и направление момента вращения двигателя.
Напряжение Uз.т благодаря разделительным диодам V1 и V2 поступает только к регулятору тока одной из групп вентилей ТП-В или ТП-Н, работающих при заданном направлении тока двигателя.
Полярность сигналов задания уравнительного тока соответствует выпрямительному режиму для обеих вентильных групп. Таким образом, в нулевом положении командного органа, когда обе группы работают в выпрямительном режиме, при малом выпрямленном напряжении, что соответствует несимметричному согласованию без люфта.
Появление сигнала Uз.т с полярностью, совпадающей с направлением проводимости диода V1, приводит к увеличению выпрямленного напряжения группы ТП-В и разгону двигателя в направлении «вперед». Задающий сигнал на входе регулятора РТН при этом не меняется и остается равным Uз.у.т, т.к. диод V2 не пропускает напряжение данной полярности. Увеличение выпрямленной ЭДС группы ТП-В при неизменной ЭДС группы ТП-Н могло бы привести к значительному возрастанию уравнительного тока. Однако этого не произойдет, т.к. некоторое увеличение тока в уравнительном контуре повышает сигнал от датчика тока ДТ-Н. Под действием этого избыточного сигнала (Uд.т.н > Uз.у.т) регулятор РТ-Н переведет группу ТП-Н в инверторный режим и ограничит тем самым величину уравнительного тока в заданных пределах. Таким образом, уравнительный ток, величина которого несколько больше заданного сигналом Uз.у.т. значения, поддерживается группой, свободной от тока нагрузки. Инверторный режим группы ТП-Н в установившемся режиме определен разностью сигналов Uд.т.н - Uз.у.т , а среднее значение напряжения группы ТП-Н, работающей в инверторном режиме, меньше среднего выпрямленного напряжения группы ТПВ на величину, определяемую сигналом Uз.у.т.
В переходном режиме работы электропривода имеет место перерегулирование уравнительного тока, величина которого зависит от параметров системы регулирования и темпа изменения сигнала задания тока нагрузки двигателя.
Недостатками систем управления, выполненных по структурной схеме (см. рис.52), являются большие броски уравнительного тока во время переходных процессов и необходимость применения трансформатора с двумя комплектами вторичных обмоток.
При питании вентильных групп, соединенных по мостовым схемам, от общей обмотки трансформатора не обеспечивается достаточно надежная работа электропривода, т.к. в этом случае, оказывается, существует не один, а два контура уравнительного тока (см раздел «Дроссели в реверсивном тиристорном электроприводе»), в одном из которых уравнительный ток контролируется регулятором, а в другом - поддерживается параметрически.
От этих недостатков свободна система регулирования тока с перекрестными обратными связями: В схеме имеются два пропорциональных регулятора уравнительного тока РТ-В и РТ-Н, управляющих, соответственно, группами вентилей ТПВ и ТПН, и пропорционально- интегральный регулятор тока якоря двигателя РТЯ. На каждый регулятор уравнительного тока, который управляет одной из групп вентилей, подается задание на уравнительный ток Uз.у.т и обратная связь по току, протекающему через другую группу вентилей.
В нулевом положении, когда двигатель стоит, каждая из вентильных групп обтекается уравнительным током. При работе двигателя обратная связь по току группы вентилей, пропускающей ток двигателя, запирает другую группу вентилей, пропускающую уравнительный ток. Таким образом, при наличии тока двигателя уравнительный ток отсутствует и отсутствуют активные потери и потребление реактивной мощности, вызываемые уравнительным током.
В схеме (рис.53) уравнительный ток безынерционно изменяется с изменением тока двигателя. С ростом величины тока двигателя уменьшается величина уравнительного тока, которая становится равной нулю, когда ток двигателя достигает двойного значения начального уравнительного тока. Таким образом ширина зоны действия уравнительного тока на внешних характеристиках может быть установлена оптимальной путем выбора нужного значения Uз.у.т. Благоприятная динамика уравнительного тока позволяет использовать данную схему и в тех случаях, когда обе группы вентилей питаются непосредственно от одной вторичной обмотки трансформатора.
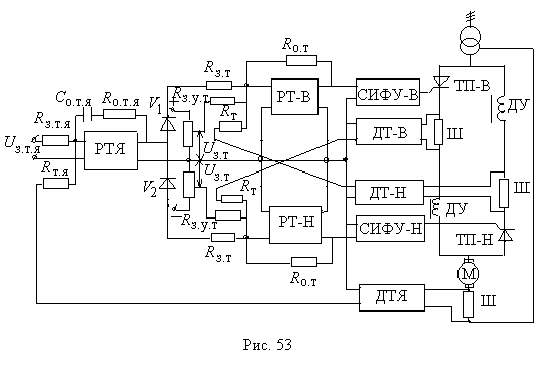
Недостатком схемы (рис.53) является необходимость применения трех регуляторов вместо двух в предыдущей схеме (рис.52).
Подобно одноканальной системе с симметричным согласованием двухканальная система регулирования тока обеспечивает практически безлюфтовое сопряжение характеристик двигательного и тормозного режимов и переход из одного режима в другой без паузы в кривой тока, т.е. предельное быстродействие электропривода. При этом, в отличие от одноканальных систем, величина уравнительного тока ограничивается не только в установившихся режимах, но и во время переходных процессов.
Величина уравнительных дросселей здесь невелика.
Системы с автоматическим регулированием уравнительного тока не требуют строгой идентичности систем управления СИФУ -В и СИФУ -Н, также как и других элементов обоих каналов регулирования тока. Это является их большим преимуществом по сравнению со схемами с линейным согласованием без регулятора уравнительного тока. В последних согласование осуществляется подбором и настройкой характеристик систем фазового управления и управляющих устройств, которые имеют дрейф из-за колебаний напряжения, изменений температуры и старения элементов.
Недостатком систем с автоматическим регулированием уравнительного тока является большая сложность систем управления по сравнению с одноканальными системами.
Дроссели в реверсивном тиристорном электроприводе с совместным управлением.
В реверсивном тиристорном электроприводе с совместным управлением вентильными группами уравнительные дроссели ограничивают величину уравнительного тока и скорость нарастания аварийного тока при опрокидывании инвертора.
Общее число дросселей в схеме, их конструктивное исполнение, величина индуктивности зависят от их назначения, силовой схемы преобразователя и расположения дросселей в схеме.
В нулевых схемах (см. рис.42, 44) общее число дросселей может быть принято равным двум или трем в зависимости от исполнения уравнительных дросселей. По обмотке уравнительного дросселя работающей группы протекает не только уравнительный ток, но и ток нагрузки. Если воздушный зазор в магнитопроводе этого дросселя сделать небольшим, то из-за большой намагничивающей силы, создаваемой нагрузочным током, уравнительный дроссель насытится. Индуктивность его при этом резко уменьшится, и для ограничения пульсаций тока в якоре двигателя придется устанавливать еще дополнительно не насыщающийся сглаживающий дроссель Д, т.е. общее число дросселей будет равно трем.
Уравнительный ток при этом ограничивается индуктивностью ненасыщающегося при протекании уравнительного тока уравнительного дросселя неработающей группы вентилей. Для этого индуктивность свободного от тока нагрузки уравнительного дросселя должна равняться величине, определяемой уравнением (25).
Если уравнительные дроссели сделать ненасыщающимися, то отдельного сглаживающего дросселя не потребуется. Индуктивность дросселя, необходимая для ограничения уравнительного тока, обычно больше той, которая нужна для ограничения пульсаций тока нагрузки. Поэтому не насыщающиеся уравнительные дроссели могут одновременно выполнять роль сглаживающих. Индуктивность каждого из ненасыщающихся дросселей должна быть равна половине величины, полученной из уравнения (25).
Схемы реверсивных мостовых ТП и расположение в них уравнительных дросселей показаны на рис.43, 45.
В перекрестной схеме (см. рис.43) имеется один контур уравнительного тока. Здесь уравнительные дроссели могут быть насыщающимися и не- насыщающимися. При насыщающихся уравнительных дросселях в цепи нагрузки необходим дополнительный сглаживающий дроссель.
Во встречно-параллельной мостовой схеме (схема с одной вторичной обмоткой согласующего трансформатора или при питании двух выпрямительных мостов от общей сети трехфазного тока - бестранстформаторный вариант) имеется два контура уравнительного тока. В первый контур Iур1 входят вентили VS1 ,VS3 , VS 5 , VS 3 ў, VS 4 ў, VS 6 ў, а во второй Iур 2 - вентили VS2 , VS4 , VS6 , VS1ў , VS3 ў, VS5 ў. При этом каждая группа эквивалентна 3-фазной мостовой схеме, включенной на свои уравнительные дроссели. Если уравнительные дроссели выполнить насыщающимися от тока нагрузки, то придется включить их в каждый из полюсов постоянного тока обоих мостов, т.е. всего четыре дросселя (уравнительных). При работе группы ТП-В насыщаются дроссели 1ДУ и 2ДУ, а дроссели 3ДУ и 4ДУ остаются не насыщенными и ограничивают уравнительный ток. При работе группы ТП-Н уравнительный ток ограничивается дросселями 1ДУ и 2ДУ. Кроме того, потребуется еще и сглаживающий дроссель ДС.
Если уравнительные дроссели сделать ненасыщающимися при протекании по ним тока нагрузки, то достаточно установить по одному дросселю на группу, т.е. всего два дросселя (1ДУ и 3ДУ),которые будут одновременно выполнять и функции сглаживания рабочего тока двигателя.
Ненасыщающиеся дроссели имеют большие массу, размеры и стоимость, чем насыщающиеся. Поэтому суммарные массы и стоимости всех дросселей в установках с насыщающимися и в установках с ненасыщающимися уравнительными дросселями различаются между собой сравнительно мало.
С целью уменьшения массы и стоимости предложено несколько типов многообмоточных уравнительных дросселей специальной конструкции. На рис.54 показана одна из подобных конструкций, разработанная научно- проектным институтом ВНИИ «Электропривод». Для ограничения уравнительных токов здесь используются двухобмоточные уравнительные дроссели 1ДУ и 2ДУ. Обмотки каждого из дросселей включены встречно так, что суммарная намагничивающая сила каждого дросселя от тока нагрузки равна нулю. Благодаря этому отсутствует насыщение сердечников от тока нагрузки. Кроме того, при подобном включении возникает электромагнитная связь между контурами уравнительных токов, которая уменьшает величину последних. В результате действия этих факторов суммарная
Дата добавления: 2017-02-13; просмотров: 3128;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
