Основные узлы многоканальной СИФУ
Синхронизирующие устройства (СУ). Назначением СУ является привязка включающих импульсов тиристоров к определенным точкам синусоидального напряжения питания силовой части преобразователя. Поэтому, если преобразователь трехфазный, на СУ должно быть непременно подано 3 – фазное питающее напряжение.
Простейшим, наиболее распространенным СУ является трансформатор. В качестве примера рассмотрим СУ, которое используется в системах управления 3 – фазных мостовых преобразователей. Схема трансформатора, на первичную обмотку которого подается трехфазное напряжение сети, изображена на рис.32
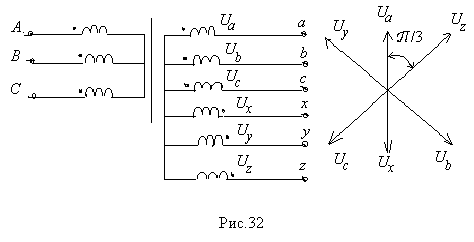
В соответствии с принципом действия 3 – фазного мостового ТП на его тиристоры при шестиканальной системе управления должны поступать включающие импульсы, сдвинутые друг относительно друга на угол p/3. Вторичные обмотки синхронизирующего устройства выполнены со средней точкой, причем, эта точка соединяет начало и конец каждой полуобмотки. Поэтому со вторичных обмоток снимается шестифазное напряжение, векторная диаграмма которого представлена на том же рисунке. Схема позволяет использовать как фазные, так и линейные напряжения вторичных обмоток синхронизирующего устройства.
Так точке естественной коммутации линейных напряжений ау и az (1) соответствует переход через нулевое значение напряжения bz (2) (рис.33).
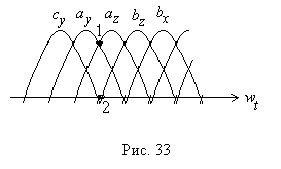
Этот переход может быть легко зафиксирован с помощью вентильного элемента и, значит, в этот момент может быть послан импульс в фазосдвигающее устройство, которое с этого момента начинает отсчет угла a. Т.о. синхронизирующее устройство определяет момент естественной коммутации и в это время посылает сигнал в ФСУ.
Недостатком синхронизирующих устройств, выполненных в виде трансформатора, является чувствительность параметров напряжений вторичных обмоток к амплитудным и фазовым искажениям питающей сети, а также к различного рода помехам, возникающим в ней при эксплуатации. Для устранения этих помех к СУ подключают различные фильтры, как пассивные, состоящие обычно из реактивных элементов, так и активные.
Фазосдвигающее устройство (ФСУ). Назначение ФСУ в СИФУ ТП регулирование фазы включающих импульсов тиристоров. Возможны различные принципы их реализации, но неизменным является то, что ФСУ осуществляет сдвиг импульса относительно момента естественной коммутации в сторону запаздывания на угол a, величина которого регулируется в зависимости от значения управляющего напряжения UУ .
Рассмотрим два принципа фазосмещения, нашедших распространение в реальных ТП. Один из них называется вертикальный, другой – интегральный.
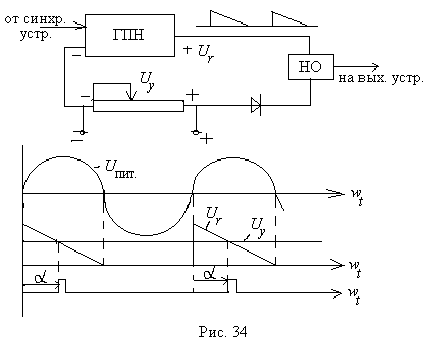
Вертикальный принцип фазосмещения управляющих импульсов ТП. Сущность вертикального фазового управления заключается в сравнении переменного напряжения (пилообразной, синусоидальной, треугольной и других форм) с постоянным напряжением регулируемой величины, поступающим от устройств автоматического регулирования. На рис.34 представлена структурная схема одного из вариантов ФСУ подобного типа. Основными узлами его являются генератор пилообразного напряжения (ГПН), синхронизированный с синусоидальным питающим напряжением с помощью СУ, нуль – орган (НО) (компаратор) и источник регулируемого постоянного напряжения, величина которого UУ регулируется вручную или автоматически.
Формирование включающего импульса в схеме происходит в момент равенства пилообразного напряжения генератора Uг и напряжения управления UУ. При изменении UУ изменяется фаза управляющего импульса. Функции сравнивающего устройства выполняет нуль – орган (НО), на входы которого поступают напряжения UУ и Uг. Нуль- орган может быть выполнен по различным схемам и на разной элементной базе. Например, может быть использована схема компаратора, выполненная на операционном усилителе.
Генератор пилообразного напряжения в описанной схеме имеет линейно спадающее напряжение, мгновенное значение которого сравнивается с UУ. Обычно в таких ГПН используется процесс заряда емкости постоянным по величине током. Недостатком этого ГПН является нелинейность характеристики “вход – выход” тиристорного преобразователя. Эта нелинейность обусловлена нелинейной зависимостью Ed = ¦(a). При линейном пилообразном напряжении сохраняется линейная зависимость a = ¦(UУ ), но зависимость выходной ЭДС от UУ остается нелинейной. Это обстоятельство является существенным недостатком ТП, т.к. в системах АЭП приходится устранять эту нелинейность теми или иными методами.
Иногда указанная нелинейность компенсируется за счет нелинейности опорного напряжения (переменное напряжение, которое сравнивается по величине с UУ ). Нелинейность опорного напряжения должна быть такой, чтобы она компенсировала нелинейность регулировочной характеристики ТП. Чаще всего в качестве опорного напряжения используется часть синусоиды напряжения питания ТП, а именно ее косинусоидальная часть.
На рис.35 изображена диаграмма напряжения трехфазного нулевого ТП, а также диаграмма напряжений при формировании управляющих импульсов. Как и на предыдущей диаграмме здесь реализован вертикальный принцип фазосмещения. При этом в качестве опорного напряжения использована косинусоидальная часть переменного напряжения не участвующей в коммутации фазы. Так, при коммутации фаз a – b опорным напряжением является “перевернутая” фаза c; при коммутации фаз b – c – “перевернутая” фаза а и т.д.
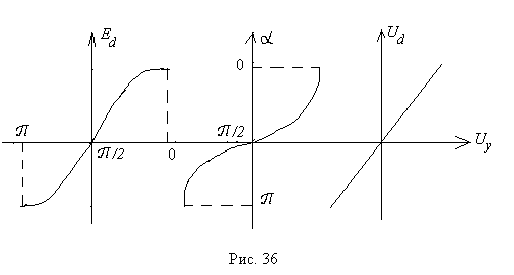
В соответствии с диаграммой, зависимость угла a от UУ – дарккосинусоидальная (a = arccos UУ ), зависимость Ud от a - косинусоидальная (Ud = Ud0 cos a ). Зависимость же Ud = ¦(UУ ), вследствие того, что одна нелинейность компенсирует другую, оказывается линейной (рис.36).
Достоинства описанной системы очевидны. Линейность характеристики вход-выход тиристорного преобразователя существенно облегчает включение его в систему автоматического регулирования координат электропривода, кроме того облегчается синхронизация опорного напряжения с напряжением питающей сети, т.к. это опорное напряжение не что иное, как часть синусоиды одной из фаз того- же напряжения сети.
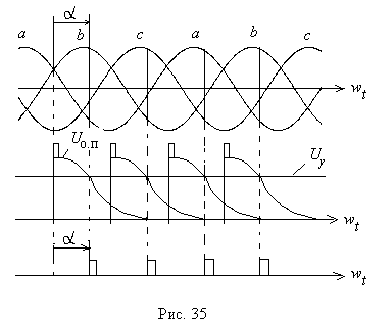
Однако на пути внедрения этой системы стоят некоторые объективные трудности. Дело в том, что напряжению сети свойственна некоторая нестабильность, что затрудняет использование его в качестве опорного напряжения. Такая нестабильность, как высокочастотные искажения синусоиды, устраняется с помощью фильтров. Сложнее преодолеваются трудности, связанные с “посадками” напряжения, которые допускаются “Правилами эксплуатации электроустановок”. Но в СИФУ уменьшение амплитуды опорного напряжения чревато пропусками управляющих импульсов, что недопустимо. Во избежание этого в высшей точке опорного напряжения создается импульс напряжения, что не позволяет UУ при максимальных его значениях избежать пересечения с Uопорн (рис 35).
Наконец, последняя трудность связана с изменяющимся наклоном кривой опорного напряжения. Чувствительности нуль – органа может не хватить для четкого его срабатывания, когда опорное напряжение выполаживается, т.е. в верхней и в нижней точках. Это можно избежать, применив компараторы на операционных усилителях с очень большими коэффициентами усиления. В настоящее время СИФУ, обеспечивающие линейность характеристики вход – выход ТП получают все более широкое распространение.
Интегральный принцип фазосмещения управляющих импульсов ТП. Сущность этого принципа фазосмещения можно прояснить, рассмотрев структурную схему, изображенную на рис.37
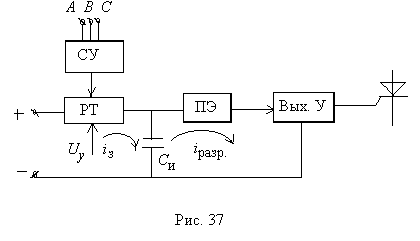
В схему входят следующие элементы:
1. Синхронизирующее устройство(СУ);
2. Регулятор тока (РТ), обеспечивающий ток заряда интегрирующей емкости (си), значение которого определяется величиной управляющего напряжения UУ ;
3. Пороговый элемент (ПЭ), срабатывает при достижении потенциала заряда емкости (си) порогового значения. При срабатывании ПЭ емкость разряжается через него на выходное устройство (Вых.У), которое формирует управляющий импульс на тиристор.
Схема работает следующим образом, в моменты естественной коммутации СУ посылает сигнал (импульсы) на РТ. Начиная с момента естественной коммутации РТ обеспечивает заданное значение тока заряда емкости си . Время накопления заряда на емкости до величины потенциала срабатывания порогового элемента – это время задержки подачи управляющего импульса на управляющий электрод тиристора. Оно определяет величину угла управления a.
Достоинством схем с интегральным принципом фазосмещения является их простота и надежность. Их недостаток – более низкая точность поддержания величины угла a на заданном значении. Такие системы находят применение в маломощных ТП с нежесткими требованиями к статическим и динамическим показателям электропривода. Диапазон мощностей электропривода с описанными ТП – 2...15кВт.
Входные устройства СИФУ ТП
Назначение входного устройства – сформировать аналоговый сигнал управления UУ на СИФУ ТП, учитывающий задающее воздействие, воздействие сигналов обратных связей и корректирующее воздействие. Для реализации возложенных на входное устройство (ВУ) функций необходимо осуществить:
· фильтрацию всех поступающих сигналов;
· выполнить все необходимые логические действия с поступившими сигналами (суммирование с учетом их знаков, интегрирование тех сигналов, воздействие которых должно определяться их средними значениями);
· усиление результирующего сигнала;
· ограничение UУ допустимыми минимальными и максимальными значениями.
Каждая из перечисленных функций выполняется, обычно, своим, специальным, предназначенным для этого устройством, схемная и элементная реализация которого может иметь массу вариантов. Отметим некоторые тенденции в реализации этих устройств:
- так как мощности поступающих сигналов малы, в качестве фильтров обычно используют пассивные однозвенные R – C фильтры – Г – образные и П – образные;
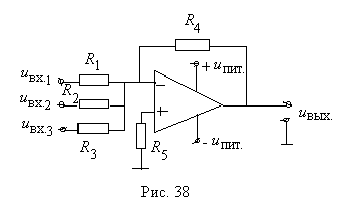
- функция суммирования реализуется обычно сумматором, выполненном на операционном усилителе, например, по схеме приведенной на рис.38
- усиление результирующего сигнала выполняется усилителем постоянного тока, выполненным на транзисторах либо на операционных усилителях.
- ограничение UУ сверху и снизу может быть реализовано с помощью кремниевых стабилитронов.
Выходные устройства СИФУ ТП (формирователи импульсов)
Обычно в системах управления операции формирования импульсов, их усиления и гальванической развязки с системой управления осуществляются одним узлом, который в дальнейшем именуется выходным устройством (Вых.У). В других литературных источниках они именуются формирователями импульсов (ФИ).Примером может служить устройство, схема которого представлена на рис.39.Оно состоит из выходного транзистора VT, мощность которого позволяет обеспечить все требуемые параметры управляющих импульсов; импульсного трансформатора (Тр – И), со вторичной обмотки которого снимаются импульсы, поступающие на управляющий электрод тиристора.
Существенное влияние на параметры включающего импульса в формирователе импульсов (ФИ) оказывает импульсный трансформатор. Одним из основных требований к нему является обеспечение минимального искажения трансформируемого импульса. С этой целью, например, при разработке этих трансформаторов конструктивному исполнению. В частности, конструкцию магнитопровода и расположение витков первичной и вторичных обмоток выбирают из условий обеспечения минимальных значений потоков рассеяния и межвитковых емкостей.
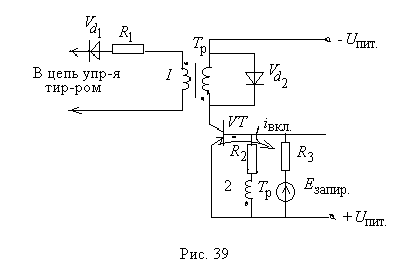
В частности используют кольцевые, витые из пермалоевой магнито мягкой ленты сердечники и экранированный намоточный провод. Это объясняется тем, что потоки рассеяния, характеризуемые обычно в трансформаторе индуктивностью рассеяния обмоток, влияют на передачу фронта импульса. Если индуктивности рассеяния и межвитковые емкости велики, то фронт импульса на вторичной обмотке становится более пологим. В приведенной схеме для интенсивного нарастания тока в первичной обмотке трансформатора в момент формирования импульса введена положительная обратная связь, для чего предусмотрена дополнительная вторичная обмотка трансформатора, включенная в цепь управления (2).
Для предотвращения утечки тока через выходную цепь (Э-К) транзистора и намагничивания сердечника трансформатора этими токами утечки в промежутках между рабочими импульсами, предусмотрен источник запирающей ЭДС (Eзапир.), который запирая транзистор в промежутках между рабочими импульсами, предотвращает подмагничивание сердечника, но не препятствует четкому включению транзистора VT при создании условий для прохождения iвкл.
Диод VD2 , установленный параллельно первичной обмотке трансформатора, затягивает процесс размагничивания импульсного трансформатора в промежутках между рабочими импульсами и, этим самым, защищает транзистор VT от пробоя импульсом перенапряжения, который возник бы при отсутствии VD2 .
Особенностью работы импульсных трансформаторов в ФИ является то, что они передают однополярные импульсы, т.е. работают на частном цикле кривой намагничивания магнитопровода. Это ухудшает использование стали магнитопровода и, следовательно, приводит к ухудшению массо – габаритных показателей трансформатора. Для более полного использования стали трансформатора в некоторых случаях применяют медленное перемагничивание магнитопровода током, противоположным току основных импульсов, что позволяет работать на всей кривой намагничивания.
Масса и габариты импульсного трансформатора в основном определяются амплитудой и длительностью трансформируемых импульсов. Поэтому в мощных ТП, когда имеет место групповое (параллельное и последовательное) включение вентилей, вес и габариты импульсных трансформаторов становятся чрезмерными. Для уменьшения этих параметров трансформатора может быть использован принцип формирования включающих импульсов, основанный на представлении включающего импульса в виде выпрямленного напряжения высокой частоты.
Сущность принципа заключается в следующем: переменное напряжение высокой частоты 20...100 кГц от высокочастотного генератора ВЧГ через промежуточный трансформатор Тр1 со средней точкой поступает на трансформатора Тр2 оконечного узла канала управления и далее выпрямляется диодами VD3 , VD4 .
Диоды VD1 и VD2 и транзистор VT используются для формирования длительности включающего импульса. Когда на базу транзистора VT поступает импульс управления UУ (например, с дифференцирующего устройства, задающего длительность включающего импульса), транзистор включается. В результате этого первичные полуобмотки трансформатора Тр2 и вторичные полуобмотки трансформатора Тр1 соединяются между собой через диоды VD1 , VD2 и включающий транзистор VT (рис.40).
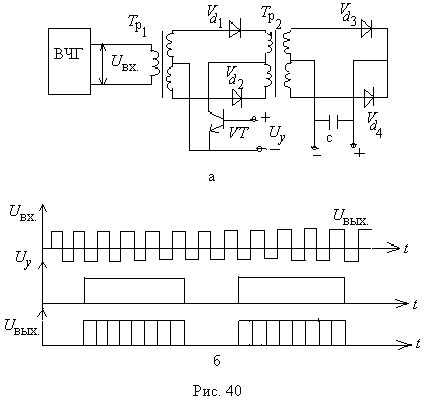
Напряжение, возникающее на вторичной обмотке трансформатора Тр2 выпрямляется диодами VD3 и VD4 , фильтруется конденсатором “с” и поступает на управляющий электрод тиристора. Изменяя длительность включенного состояния транзистора VT, можно регулировать ширину включающего импульса. Благодаря высокой рабочей частоте трансформаторы Тр1 и Тр2, выполняемые обычно на ферритовых магнитопроводах, имеют сравнительно небольшие массу и габариты.
При использовании трансформаторов для гальванической развязки системы управления (СИФУ ) и силовой части преобразователя возникают паразитные (емкостные и электромагнитные) связей между первичной и вторичной обмотками, затрудняющие обеспечение помехозащищенности узлов и элементов преобразователя.
Значительно более перспективными элементами, обеспечивающими гальваническую развязку в цепях преобразователя являются оптронные электронные приборы, например оптопары (оптроны).
Оптрон – это прибор, состоящий из двух элементов: управляющего и управляемого, между которыми имеется только оптическая связь. Последняя практически не чувствительна к изменениям электромагнитного поля, что позволяет использовать оптопары для развязки цепей и предоставить прохождение различного рода помех от одной цепи к другой.
Управляющим элементом оптопары – источником света – обычно является арсенидогаллиевый светодиод, излучающий свет при токах 5...20mА и напряжении 1,2...1,5В.
В качестве управляемого элемента – приемника света – обычно используются фотодиоды, фототранзисторные и фототиристорные полупроводниковые приборы.
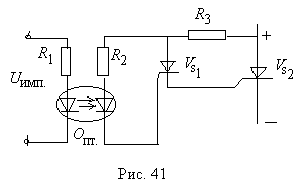
На рис.41 представлена одна из типовых оптоэлектронных тиристорных схем, используемых в качестве оконечного узла выходного устройства. Для согласования параметров силового тиристора VS2 и входных параметров фотодиодного оптрона “Опт” в схеме используется промежуточный тиристор VS1. Следует отметить, что в рассматриваемой схеме благодаря использованию оптрона влияние режима работы силового тиристора на электрические цепи СИФУ незначительно.
Для управления мощными фототиристорами разработан и применяется оптический способ. Сущность этого способа заключается в использовании для включения фототиристоров мощного направленного светового потока. В качестве источника такого потока могут быть, в частности, использованы лазеры.
Реверс вентильного электропривода постоянного тока
Способы реверса вентильных электроприводов
Односторонняя проводимость вентилей затрудняет реверс электропривода. В противоположность системе Г – Д, где непрерывным и плавным уменьшением возбуждения генератора можно сначала затормозить привод, переводя его в режим рекуперативного торможения, а затем, изменив полярность напряжения генератора, разогнать двигатель в противоположном направлении, в вентильном приводе такой реверс выполнить сложнее. Проследим, как изменяется направление потока энергии в системе Г – Д.
В исходном состоянии, когда осуществляется движение электропривода вперед, генератор постоянного тока является источником энергии (ЭДС и ток совпадают по направлению), а двигатель – приемником (ЭДС и ток направлены встречно). При плавном уменьшении возбуждения генератора его ЭДС снижается, становится меньше встречной ЭДС двигателя и ток якоря при этом изменяет свое направление на противоположное. В этом случае двигатель становиться источником энергии, а генератор – приемником. Это энергия вращения маховых масс электропривода и механизма, претерпев ряд превращений из механической в электрическую и обратно, в виде электрической энергии переменного тока отдается в питающую сеть.
Ключевой момент в этой цепи превращений энергии – изменение направления тока якоря. В системе Г – Д это происходит без затруднений. В системе ТП – Д это сопряжено с трудностями. Поэтому при необходимости реверсирование схемы вентильного электропривода приходится усложнять. Схемы реверсивного вентильного электропривода можно разбить на две основные группы:
1. Схемы с одним комплектом вентилей и переключениями в цепи якоря или возбуждения.
2. Схемы бесконтактного реверса. Бесконтактный реверс может быть получен за счет использования двухкомплектных вентильных преобразователей, выполненных на вентилях с односторонней проводимостью (тиристорах).
В первой группе схемах реверсивного вентильного электропривода, используется простой и дешевый однокомплектный вентильный преобразователь, тем не менее она не нашла широкого распространения из – за ряда недостатков
1) невысокое быстродействие;
2) броски тока при переключениях;
3) при знакопеременной нагрузке трудности с регулированием скоростей привода из – за необходимости частого переключения из двигательного в тормозной режимы, и наоборот;
4) износ реверсивных контакторов при большой частоте включений и отсутствие надежных контакторов на токи более 500...600А. Реверсоры на большие мощности получаются громоздкими, тяжелыми, дорогими и недостаточно надежными.
Схемы с переключениями в цепи возбуждения и в цепи якоря применяются для электроприводов небольшой и средней мощности со сравнительно небольшой частотой включений (до нескольких сот в час).
Бесконтактные реверсивные схемы с двухкомплектными ТП
В тех случаях, когда требуются предельно быстрые реверсы и большая частота последних и нужны плавные и быстрые переходы с высших скоростей на низшие, применяются не схемы с переключениями, а бесконтактные схемы с двумя группами вентилей в цепи якоря, каждая из которых предназначена для питания двигателя в одном направлении. Это – реверсивные тиристорные преобразователи (РТП).
РТП обеспечивают более плавный переход из двигательного режима в тормозной. Поэтому они применяются также и для нереверсивных электроприводов, если нагрузка имеет знакопеременный характер, а производственный механизм требует точного поддержания скорости.
Схемы реверсивных вентильных электроприводов с двумя комплектами вентилей делятся на два основных класса: перекрестные схемы (или восьмерочные) и встречно – параллельные (противопараллельные).
В перекрестных схемах силовой трансформатор (Тр) имеет две изолированные группы вторичных обмоток, каждая из которых питает свою группу вентилей: ТПВ и ТПН.
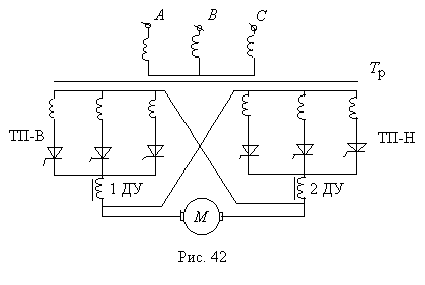
Для нулевых схем выпрямления (рис.42) группы вентилей ТПВ и ТПН соединены в виде “восьмерки”, а нагрузка включена между нулевыми точками вторичных обмоток трансформатора или, что то же самое, между катодами групп вентилей (на схеме – между внешними зажимами уравнительных дросселей 1ДУ и 2ДУ, которые в других схемах могут отсутствовать).
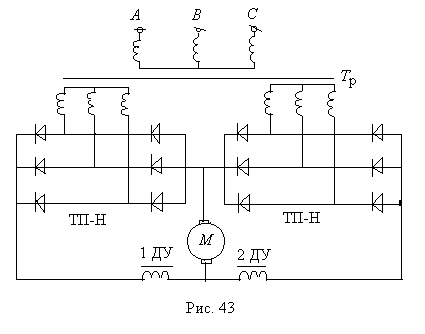
В преобразователях с мостовыми схемами выпрямления (рис.43) нагрузка включается между общей точкой соединения уравнительных дросселей 1ДУ и 2ДУ и общей точкой соединения анодов группы ТПВ и катодов группы ТПН.
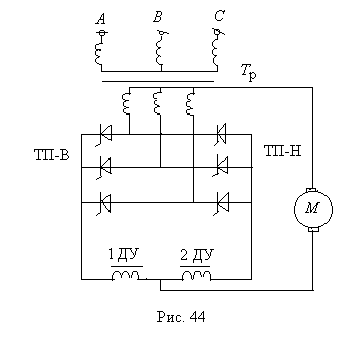
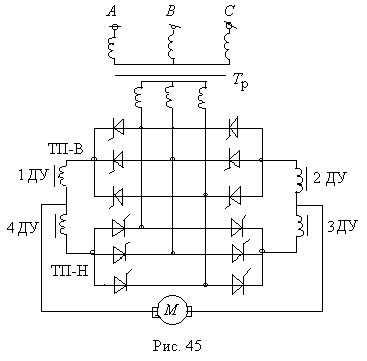
Встречно – параллельные, или противо – параллельные схемы (рис.44,а – нулевая, 45 – мостовая), имеют одну группу вторичных обмоток питающего трансформатора.
При нулевых схемах выпрямления к каждой фазе трансформатора подключено по два встречно работающих вентиля, так что катод одного соединен с анодом другого. На стороне нагрузки для одного направления тока вместе соединены все катоды, а для другого направления тока- все аноды. Анодные (ТПН) и катодные (ТПВ) группы вентилей соединены между собой через два уравнительных дросселя. Нагрузка (т.е. якорь двигателя) подключена между нулевой точкой вторичной обмотки трансформатора и общей точкой уравнительных дросселей. При мостовых схемах выпрямления якорь двигателя подключается между общими точками соединения уравнительных дросселей 1ДУ- 4ДУ и 2ДУ- 3ДУ.
Сравнивая перекрестные и встречно – параллельные схемы, можно отметить достоинства и недостатки каждого из этих классов.
Недостатком перекрестных схем является необходимость иметь более дорогой и менее эффективно используемый трансформатор с двумя комплектами вторичных обмоток. Достоинство – меньшее число уравнительных дросселей в трехфазной мостовой схеме (наиболее распространенной в вентильном электроприводе) и меньшая их индуктивность.
Во встречно – параллельных схемах размер и стоимость трансформатора меньше, т.к. требуется только одна вторичная обмотка. Более того, при применении противопараллельных схем можно обойтись без трансформатора, если уровень напряжения сети переменного тока соответствует потребной величине выпрямленного напряжения. Правда, в этом случае возможно превышение критического значения нарастания анодного тока в вентилях. Поэтому приходится устанавливать в двух фазах воздушные реакторы. Для их изготовления требуется большое количество меди, что, в какой-то степени, снижает преимущество этих схем.
Недостатком встречно – параллельных схем являются большие значения переменной ЭДС в контуре уравнительного тока, из-за чего приходится увеличивать индуктивность уравнительных дросселей, и следовательно, габариты, массу и стоимость последних.
В схемах с двумя комплектами вентилей при одном направлении вращения в выпрямительном режиме работает одна группа вентилей, а при противоположном – другая. При этом, в то время как одна группа вентилей работает в выпрямительном режиме, другая подготовлена к режиму инвертирования.
Процесс реверса может проходить двумя разными способами: без запирания неработающей группы и с запиранием неработающей группы.
Требования к системам управления и способы согласования работы вентильных групп в реверсивном ТП
Из самого принципа действия схем с двумя комплектами вентилей следует, что работа вентильных групп должна быть взаимно скоординирована. При этом к СИФУ ТП предъявляются следующие дополнительные требования:
· минимальное время реверса тока, а значит, и момента двигателя;
· отсутствие или возможно меньшее значение уравнительного тока;
· безлюфтовое сопряжение механических характеристик двигателя (выпрямительного) и тормозного (инверторного) режимов работы двигателя и преобразователя. Рассмотрим его:
Безлюфтовое сопряжение означает такое сопряжение характеристик, когда при непрерывном изменении момента нагрузки и при смене знака этого момента двигатель плавно, без скачка скорости, переходит в режим рекуперативного торможения, т.е. электромеханическая характеристика тормозного режима является продолжением характеристики двигательного режима.
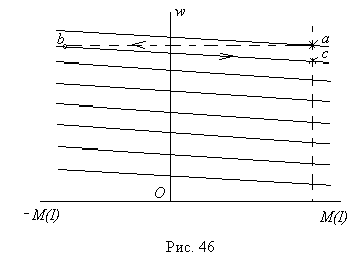
В системах управления электроприводами поворот оператором командного органа задания уровня скорости вызывает изменение задающего напряжения Uз. Тогда в случае безлюфтового сопряжения характеристик, в соответствии с рис 46, при небольшом повороте командного органа на снижение скорости электропривод сразу же переходит в режим рекуперативного торможения (из точки а переходит в точку b и за счет торможения снижает скорость до точки с).
В результате при любом повороте командного органа скорость сразу же начинает изменяться в нужном направлении. Это облегчает работу оператора, т.к. управление получается однозначным.
Безлюфтовое сопряжение характеристик облегчает также точное поддержание скорости независимо от знака момента и позволяет получить хорошие динамические показатели электропривода при переходе от двигательного режима к тормозному.
Принципы управления реверсивными группами
Существует два принципиально отличных способа согласования работы реверсивных групп вентилей, т.е. два принципа их управления: совместное управление и раздельное управление.
При совместном управлении включающие импульсы подаются на управляющие электроды вентилей обеих групп.
При раздельном управлении включающие импульсы подаются на управляющие электроды вентилей только той группы, через которую в данном режиме должен протекать ток двигателя. Вторая, неработающая группа при этом должна быть надежно заперта (заблокирована) и не должна пропускать тока.
Дата добавления: 2017-02-13; просмотров: 3699;
Поиск по сайту
Узнать еще
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cущность организации и ее основные признаки
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- I. ОСНОВНЫЕ ПОЛОЖЕНИЯ
- I. Политический режим: понятие, сущность и основные типы.
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- II. Основные задачи ГО
- II. Основные задачи службы торговли и питания

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
