Технические данные манометров
Тип манометра МП МП2
Верхний предел измерения
не более кГс/см2 6,0 16,0
Класс точности 1,5 1,5
Манометры выполнены в пылезащищенном и виброустойчивом исполнении. На вагоне 81-717.5М манометры установлены на пульте управления кабины машиниста. На вагоне 81-714.5М манометры установлены на одной текстолитовой панели и расположены в нише над первой торцевой дверью.
Магнитоэлектрические приборы предназначены для измерения тока или напряжения в цепях силовой и управления. Приборы магнитоэлектрической системы выполнены со стрелочным указателем и с равномерной шкалой. Нулевая отметка у них может быть расположена на краю шкалы или посередине диапазона измерений.
Для расширения пределов измерения этих приборов применены калиброванные шунты (для амперметров) и добавочные резисторы (для киловольтметров), включенные в силовую электрическую схему вагона. Характеристики измерительных приборов и их назначение указаны в таблице 17
Таблица 17
| Наименование прибора | шкала измерения | класс точности | тип шунта | тип добавочного резистора | назначение прибора |
| амперметр | 0-75 | 1,5 | 75ШСМ на 75А | для контроля тока в цепях источника питания ДИП | |
| амперметр | 500-0-500 | 1,5 | 75ШСМ на 500А | для контроля тока в силовой цепи | |
| вольтметр | 0-100 | 1,5 | для контроля напряжения в цепях управления вагона | ||
| вольтметр | 0-1000 | 1,5 | Р-3033 на 200 кОм | для контроля напряжения в цепях подключенных к контактному рельсу |
На вагонах 81-717.5М магнитоэлектрические измерительные приборы установлены:
- в кабине машиниста в специальном металлическом кожухе над пультом управления, сгруппированы приборы, включенные в силовую электрическую цепь (амперметр 500-0-500 и киловольтметр 0-1000) с индивидуальной подводкой к ним проводов;
- в левом аппаратном отсеке расположен амперметр 0-75;
- в пульт управления машиниста вмонтирован вольтметр 0-100.
На вагоне 81-714.5М эти измерительные приборы расположены:
- вольтметр 0-100 и амперметр 0-75 на специальной панели в нише над передней торцевой дверью;
- киловольтметр 0-1000- в левом переднем подоконном шкафу;
- амперметр 500-0-500 – в правом заднем подоконном шкафу рядом с блоком БУ-13.
Глава 5 Общие сведения об электрических схемах
5.1 Для чего нужны электрические схемы
Современный вагон метрополитена представляет собой комплекс сложного электрического оборудования, в котором для превращения электрической энергии в механическую применяют тяговые электрические двигатели.
Установлению и соблюдению правильного режима работы электрического оборудования способствует управляющая, измерительная и защитная аппаратура, а контролирует работу оборудования система сигнализации.
На вагонах используются современные системы управления и регулирования рабочих процессов аппаратов и тяговых двигателей:
- реле РУТ регулирует ток в силовой цепи путем контроля вращения РК и выводом пуско–тормозных резисторов;
- автоматизирован пуск и разгон поезда;
- автоматически включается устройство ослабления магнитного поля двигателей;
- автоматизирован процесс торможения поезда;
- регулятор давления автоматически постоянно поддерживает уровень давления сжатого воздуха в напорной магистрали в заданных режимах.
Тяговые двигатели, аппараты, приборы вагонов соединены в электрические цепи, которые работают в строго определенной зависимости и между собой соединены многочисленными проводами, уложенными в кондуиты.
Если бы не было электрических цепей, было бы очень трудно осуществить требуемые соединения аппаратов, задать необходимые режимы работы электрического оборудования вагонов по системе многих единиц.
Под схемой электрической цепи понимают показанные графически соединения изображенных условными обозначениями электрических машин, аппаратов, приборов и другого электрического оборудования.
Руководствуясь схемой можно практически осуществить соединения оборудования, чтобы обеспечить его нормальную работу. При смене оборудования во время его ремонта по схеме определяют правильность включения вновь установленного оборудования.
В случае нарушения нормальной работы электрического оборудования вагона машинист в пути следования и слесарь при ремонте используют схему электрических цепей для определения и устранения неисправности.
Локомотивные бригады и ремонтный персонал должны хорошо знать устройство, назначение, работу аппаратов, приборов включенных в электрическую цепь, и научиться читать электрические схемы, эксплуатируемых вагонов. Уметь читать схемы, значит, уметь, пользуясь условными графическими изображениями, проследить путь тока по электрической цепи, определить связь и взаимодействие электрического оборудования. Четкое и ясное представление об электрической схеме, вместе с пониманием диаграммы разгона и торможения вагона – непременное условие правильного понимания сложных процессов, характеризующих работу оборудования вагонов. Это дает возможность машинисту правильно управлять поездом, полнее использовать его мощность, силу тяги при минимальных затратах электроэнергии и в тоже время избегать таких режимов работы, которые неблагоприятно бы отразились на техническом состоянии оборудования.
Применение систем автоматического регулирования работы оборудования, АРС и др. упрощает процесс управления поездом и обеспечивает его работу в наиболее выгодных режимах. Но одновременно с этим усложняет аппаратуру и схемы, что требует более глубокого их изучения.
5.2 Условные графические обозначения
Для правильного и единого изображения электрических схем применяют систему условных графических обозначений всех элементов, образующих электрические цепи, включая и соединительные провода.
Во многих случаях символы, условно изображающие элементы электрического оборудования, в какой – то мере отражают наиболее характерные черты или формы очертания самого оборудования, что облегчает их понимание и запоминание. Например: обмотка якоря тягового двигателя изображается окружностью, характерной для конструкции самого якоря и коллектора, а наличие условного обозначения щеток подчеркивает, что это машина постоянного тока. Обмотки главных полюсов обозначают полуокружностями, изображающими витки. Полупроводниковый выпрямитель (диод), обладающий свойством пропускать ток только в одном направлении, изображают в виде треугольника, острие которого указывает проводящее направление диода. Конденсатор изображают двумя вертикальными линиями линиями, указывающими на наличие изолированных друг от друга обкладок, на которых под действием электрического поля накапливаются электрические заряды и т. д.
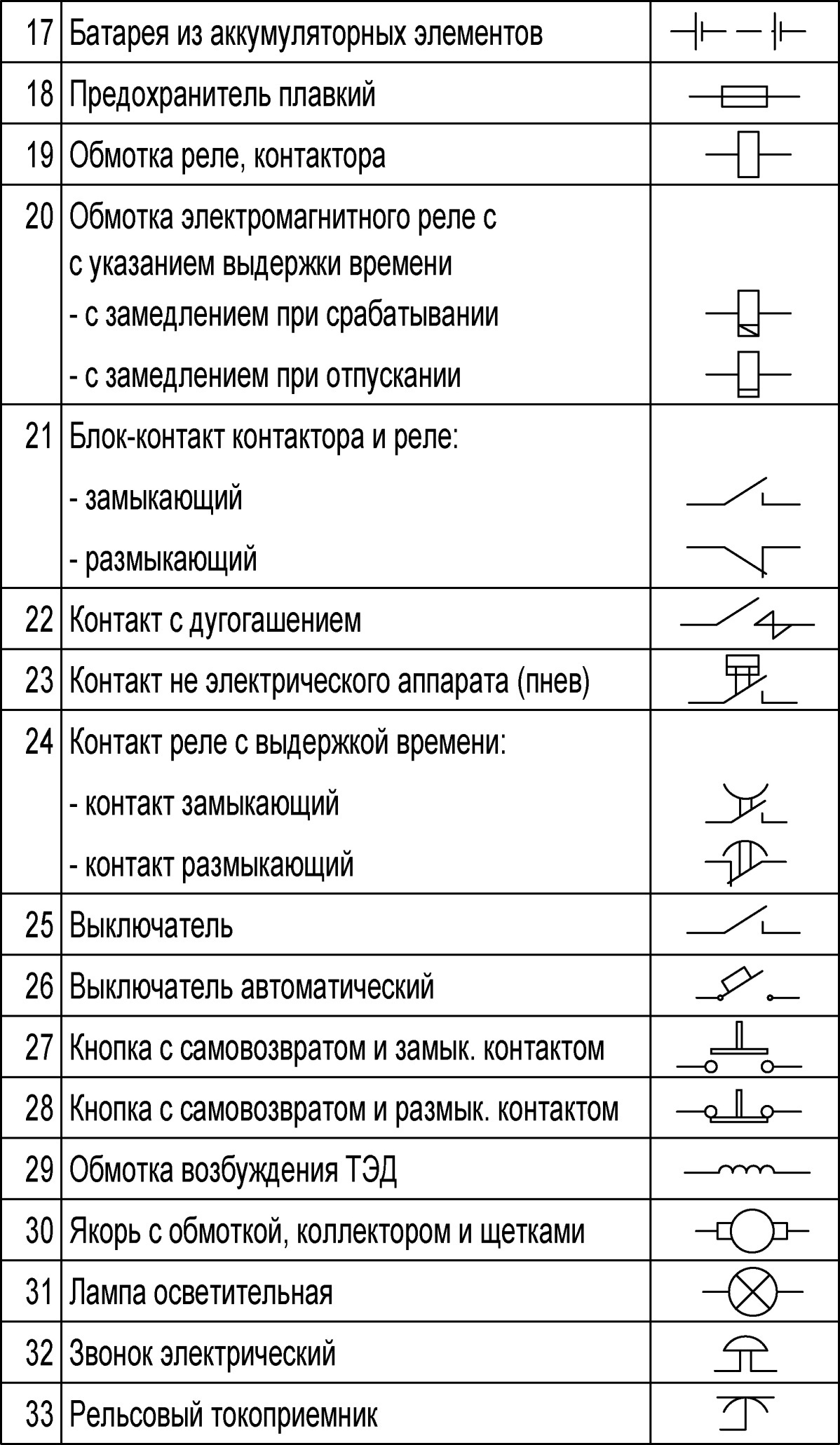
Условные графические обозначения аппаратов, приборов, машин, проводов, а также знаки, характеризующие род тока и виды соединения обмоток установлены государственными стандартами (ГОСТ) и являются обязательными при составлении электрических схем. Перечень основных электрических элементов с их графическим условным обозначением приведен в табл.18. Провода, кабели, шины объединяются общим названием – линии электрической связи ими соединяют условные обозначения элементов оборудования (катушки, контакты, обмотки). Соединение линий электрической связи при пересечении обозначаются точкой, и называется узлом.
Линии электрической связи вычерчивают горизонтально или вертикально. Обычно строки схемы подобно строкам в книге читают по горизонтали слева направо.
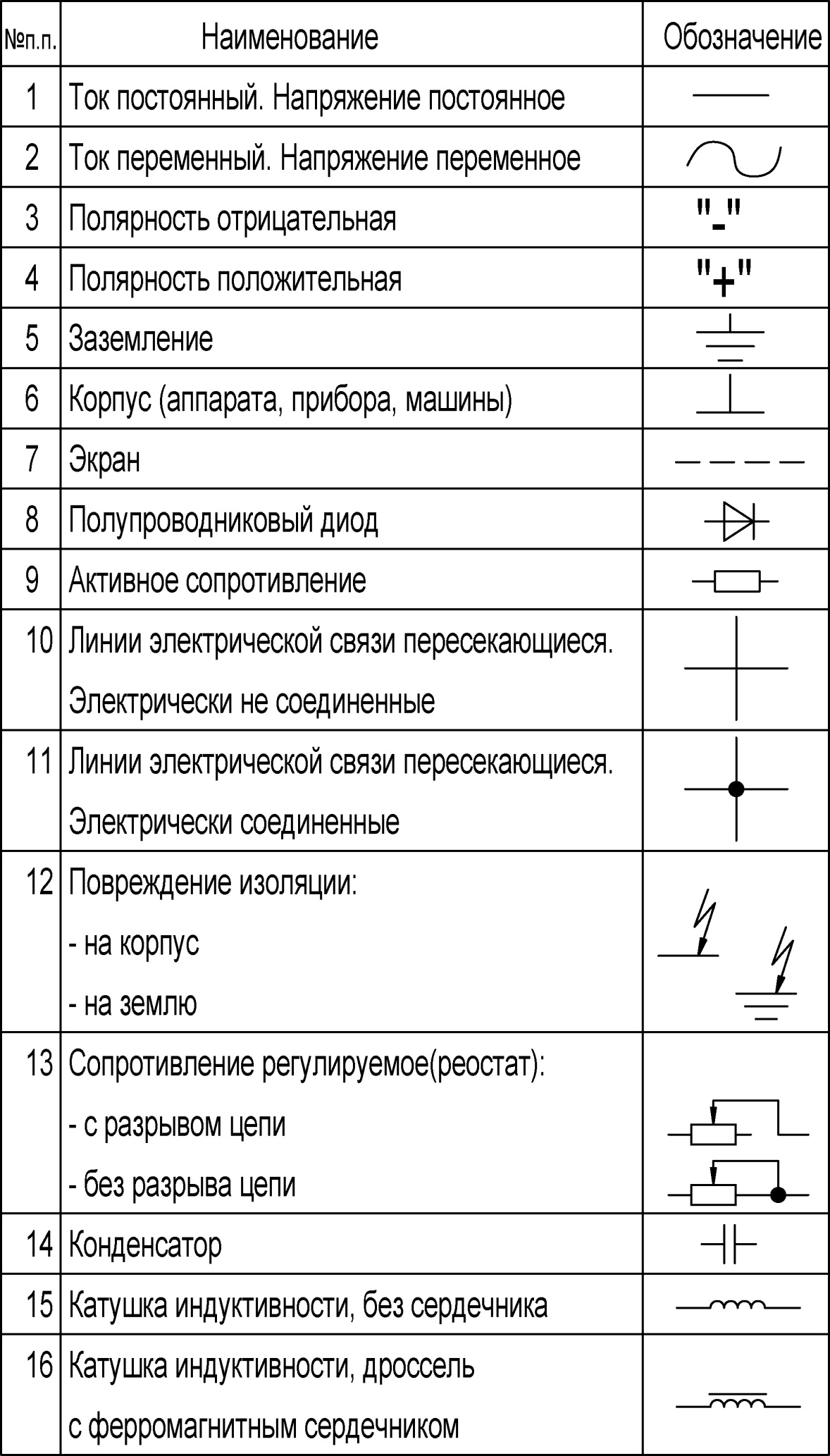 Таблица 18
Таблица 18
5.3 Применение условных графических обозначений в схемах
Коммутирующие аппараты (контакторы, реле) в схемах изображают, как правило, в отключенном положении, когда на катушках приводов нет тока и соответственно сил, воздействующих на подвижные системы и контакты. У отключенных аппаратов блокировочные контакты могут быть, как разомкнуты (замыкающие), так и замкнутые (размыкающие). При включении аппарата замыкающий контакт замыкается, соединяя цепь, в которую он включен, а размыкающий – размыкается, отключая эту цепь (см. табл.18 п.21).
Однако на подвижном составе применяют двух- или многопозиционные аппараты, у которых нет отключенного положения.
Например, двухпозиционный реверсор имеет два рабочих положения: «вперед» и «назад».
Аппараты, не имеющие отключенного положения, изображают на схемах в одном из рабочих положений, взятом за исходное. Например, реверсор – это положение «вперед».
Для реостатных контроллеров с электрическим приводом исходным положением является первая позиция. Переключатели типа ПКП – 25, контроллеры машиниста КВ70, КВ68, обычно имеют выключенное (нулевое) положение, которое и является исходным.
За исходное положение аппарата с электропневматическим приводом принимают такое, при котором к нему подведен сжатый воздух, а цепи управления вентилями обесточены. Это важно учитывать для аппаратов, управляемых электропневматическими вентилями выключающего типа, т. к. в этом случае один из цилиндров аппарата будет сообщен с источником сжатого воздуха, что не соответствует его исходному состоянию.
При исходном положении аппарата его замыкающие контакты на схеме показывают разомкнутыми, а размыкающие замкнутыми.
Подвижные контакты реле, кнопок, выключателей изображают исходя из условия, что сила, приводящая к срабатыванию, должна быть, направлена сверху вниз при горизонтальном изображении цепей и слева направо при вертикальном.
На рис.116 стрелками показано направление действия силы на подвижный контакт реле, выключателя. При срабатывании реле или выключателя под действием этой силы их контакты либо замыкаются (рис.116,а,в), либо размыкаются (рис.116.б, г).
Чтобы определить, элементы, какого оборудования изображены на схеме, о каком аппарате идет речь, какому аппарату принадлежат контакты, условные обозначения дополняют буквами или буквами с цифрами. Такие надписи делают либо внутри условного обозначения, либо над ним, но так чтобы было понятно, к какому контакту это относится.
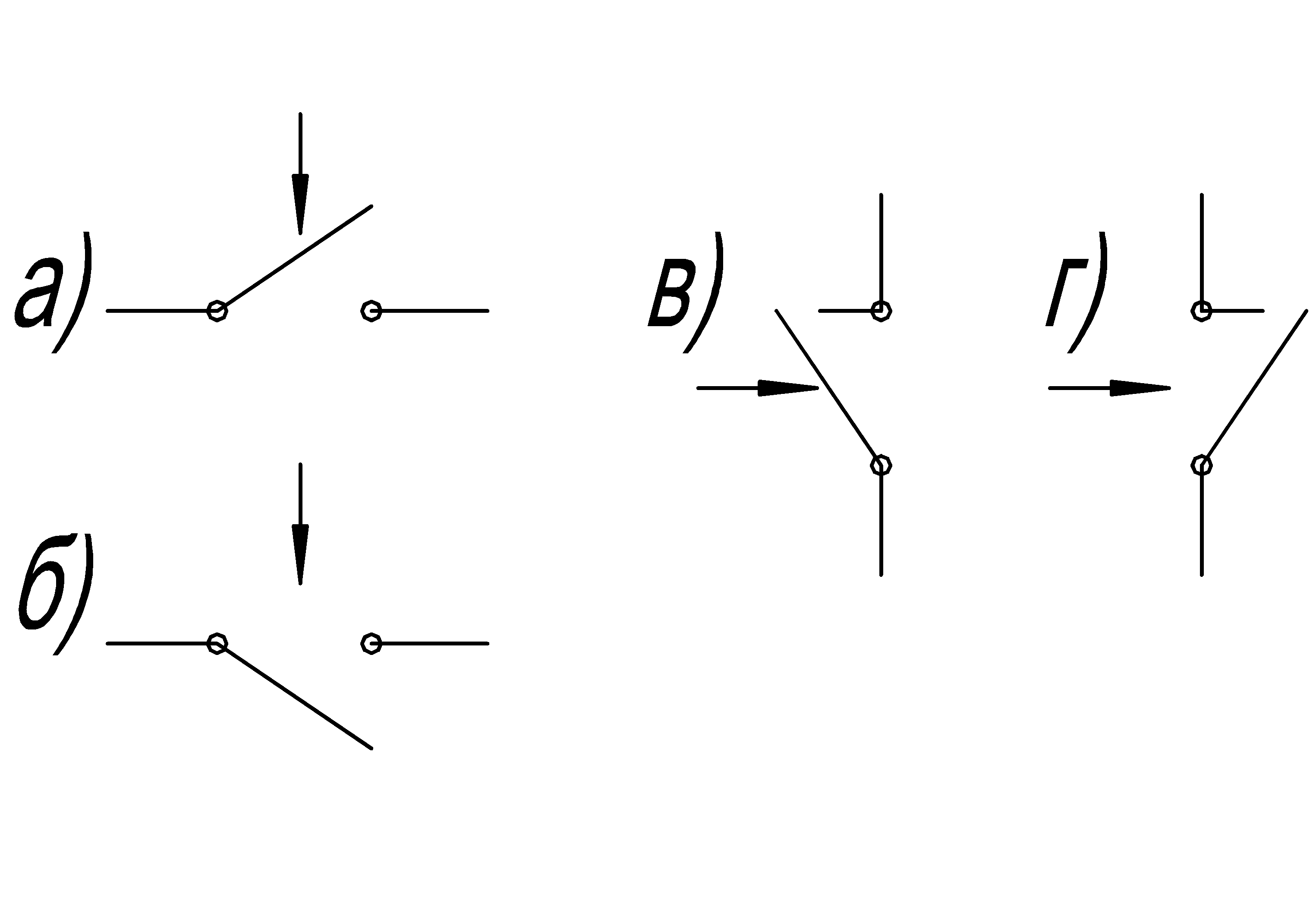
Рис.116 Направление действия силы на контакты
Для удобства пользования и облегчения запоминания используются начальные буквы слов, обозначающих наименование оборудования, или положение вала группового аппарата:
Например: мотор – компрессор – МК, реостатный контроллер - РК, реверсор – положения ВП, НАЗ, реле реверсировки – РР, переключатель положений - положения ПС, ПП, ПМ, ПТ.
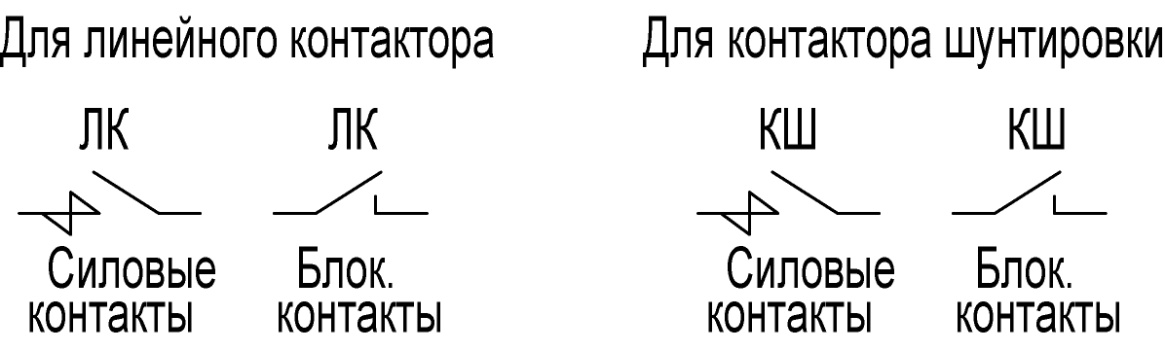
Блок – контакты аппаратов изображаются на схемах теми же символами, что и силовые контакты. Например:
В многопозиционном реостатном контроллере ЭКГ–39Б силовые контакты обозначаются буквами с цифрами. Цифры показывают порядковый номер контакта. Например: РК3, РК25, блок–контакты также обозначают буквами с цифрами, где цифры показывают на каких позициях данный блок – контакт замкнут. Например: РК1–16, указывает, что с 1 по 16 позиции этот контакт замкнут, а на 17-18-й позиции разомкнут.
В многопозиционном переключателе положений ПКГ-761Д силовые контакты вместе с блок-контактами обозначаются по наименованию позиций ПС, ПП, ПМ, ПТ с цифрами. Цифры показывают порядковый номер контакта.
При составлении схем цепей управления применяют определенную систему обозначения проводов, что облегчает чтение схем. Провода цепей управления разделяются на поездные, проходящие через межвагонные соединения по всему вагону, и вагонные, т.е. внутренние провода электрических цепей одного вагона.
Поездные провода обозначаются цифрами (1,2,3 и т. д.), вагонные – цифрами с буквами (1А, 2А, 3А).
Если вагонный провод последовательно соединяет блок – контакты или катушки аппаратов, то после каждого из них к его номеру прибавляют букву в порядке алфавита (1А, 1Б, 1В и т. д.)
5.4 Система управления схемами
Структура электрических схем тягового подвижного состава во многом определяется примененной системой управления. Различают систему непосредственного управления и систему косвенного дистанционного управления.
На вагонах метрополитена применена косвенная дистанционная система управления. При такой системе управления машинист не осуществляет непосредственного переключения в силовой цепи, а управляет оборудованием при помощи низковольтных цепей, называемых цепями управления.
Все команды на дистанционное управление вагонами по системе многих единиц передаются из головной кабины первого по ходу движения вагона поезда машинистом. В зависимости от поездной обстановки машинист переводит вручную главный вал контроллера машиниста (группового аппарата) и тем самым, включая различные комбинации кулачковых элементов, подает напряжение батареи на определенные поездные провода, по которым, практически одновременно, напряжение передается через ЭКК по всему поезду. На каждом вагоне от поездных проводов питание попадает на соответствующие вагонные провода, что и является причиной одновременной синхронной работы однотипного оборудования на всех вагонах поезда.
Коммутирующими аппаратами силовых цепей в этом случае являются контакторы, а также различные переключатели.
В цепи управления тяговыми двигателями входят кулачковые элементы контроллера машиниста, катушки электропневматических вентилей приводов аппаратов, блок- контакты аппаратов, катушки и контакты реле, соединенные провода. Управление аппаратами вспомогательного оборудования происходит по отдельным электрическим цепям, включаемыми обычно кнопками, тумблерами.
Дистанционное управление осуществляется при помощи индивидуальных или групповых коммутирующих аппаратов (контакторов, переключателей). При системе с индивидуальными аппаратами каждый контактор выполнен конструктивно как отдельный аппарат и имеет свой индивидуальный привод (ПК–163А, КПП–113). Чтобы обеспечить необходимую зависимость и последовательность включения контакторов, реле и других аппаратов, применяется система блокировок, устанавливаемых на самих контакторах.
Групповая система имеет ряд преимуществ перед индивидуальной, главное из которых состоит в том, что необходимая последовательность переключений в силовых цепях обеспечивается применением групповых аппаратов, в которых очередность включения контакторов строго определена самой конструкцией.
Так как вал группового аппарата приводится в движение приводом, то управление электрическими цепями, в которые включены контакторы, сводится к управлению работой этого привода. Групповые аппараты подразделяются на двухпозиционные- реверсор, переключатель положений (ПМТ, ППС) и многопозиционные (реостатный контроллер).
На вагонах метрополитена все переключения в цепях: пуско-тормозных резисторов, резисторов ослабления поля, а также переключения соединения групп двигателей осуществляются групповыми аппаратами. Для реверсирования групп двигателей применяется групповой аппарат–реверсор
Глава 6 Силовая схема вагонов 81-717.5М и 81-714.5М
Силовая схема вагонов 81-717.5М и 81-714.5М имеет два режима работы: тяговый и тормозной. На тяговом режиме схема предусматривает три положения: маневровое, последовательно-параллельное и параллельное с ослаблением магнитного поля ТЭД. На тормозном режиме может быть реализовано три вида торможения: торможение на 1-й позиции РК (импульсное регулирование магнитного поля генераторов на больших скоростях); ручное и автоматическое.
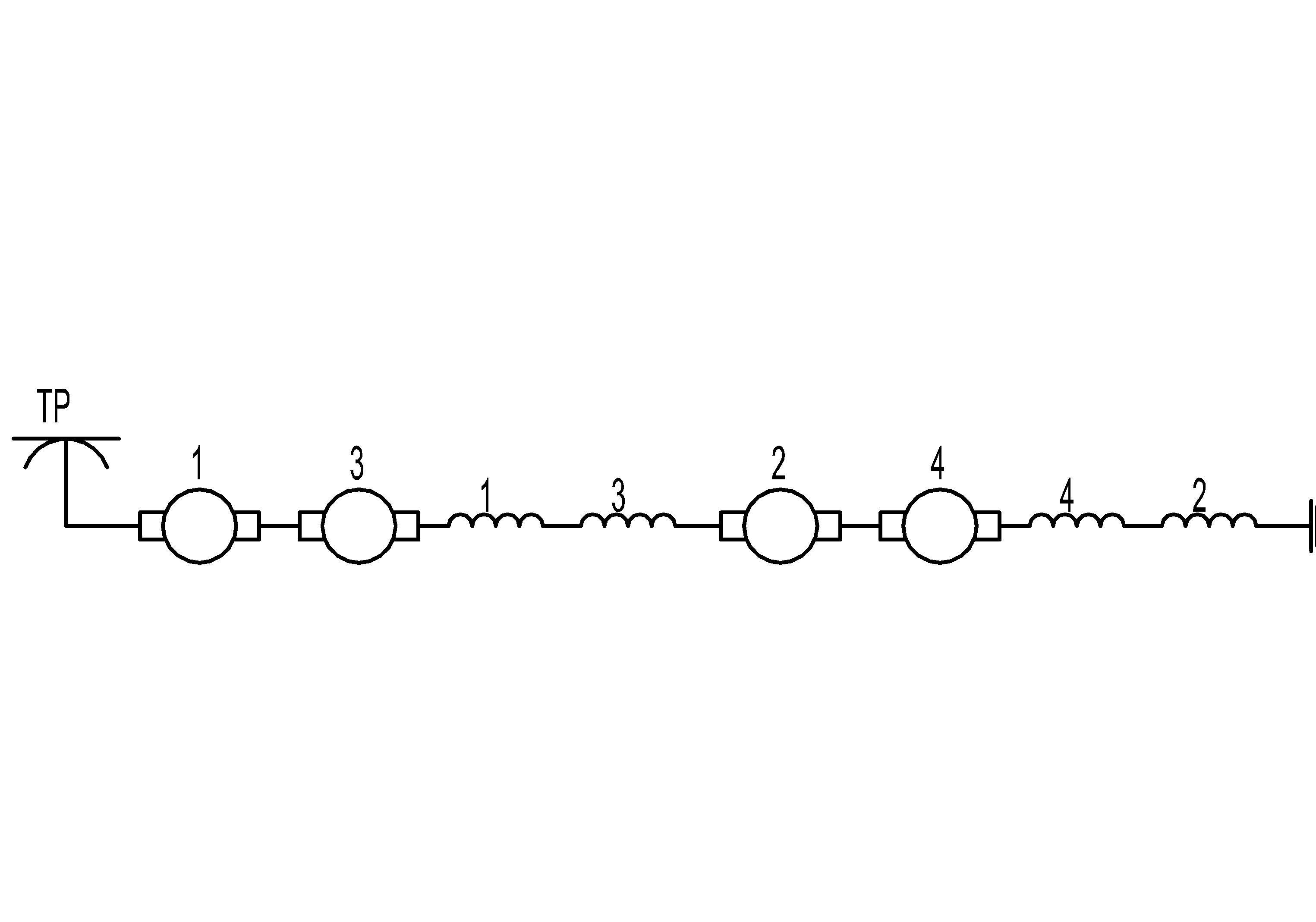
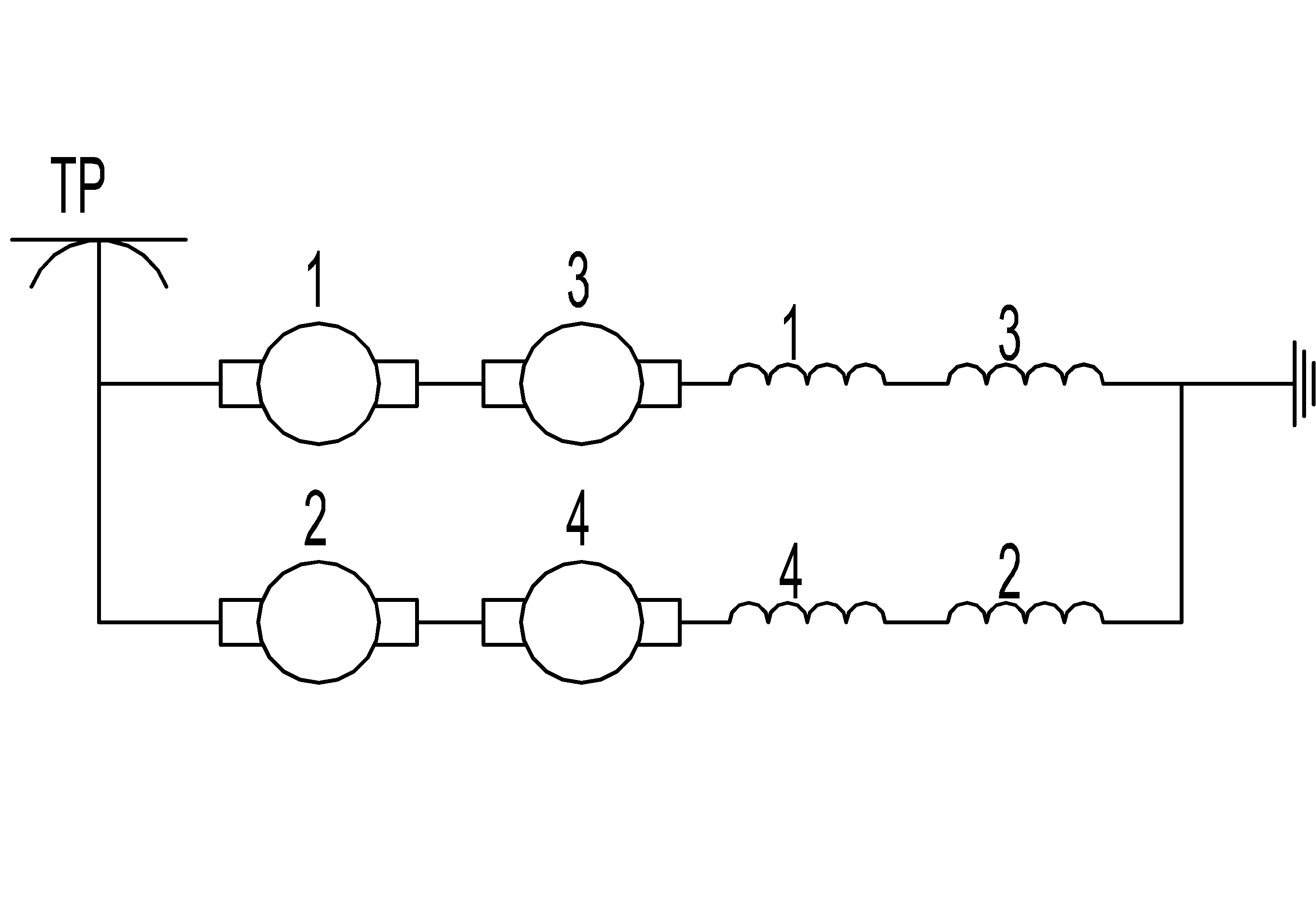
В силовой схеме тяговые двигатели между собой соединены в две группы: первая группа включает 1-й и 3-й тяговые двигатели; вторая группа включает 2-й и 4-й тяговые двигатели. Между собой тяговые двигатели в группах соединены постоянно последовательно.
Группы тяговых двигателей между собой соединяются:
- на тяговом режиме- на 1-ом положении главной рукоятки КВ- последовательно; на 2-м положении главной рукоятки КВ- последовательно-параллельно; на 3-м положении главной рукоятки КВ-последовательно- параллельно с ослаблением магнитного поля ТЭД.
- на тормозном режиме группы тяговых двигателей соединены параллельно по «циклической» схеме.
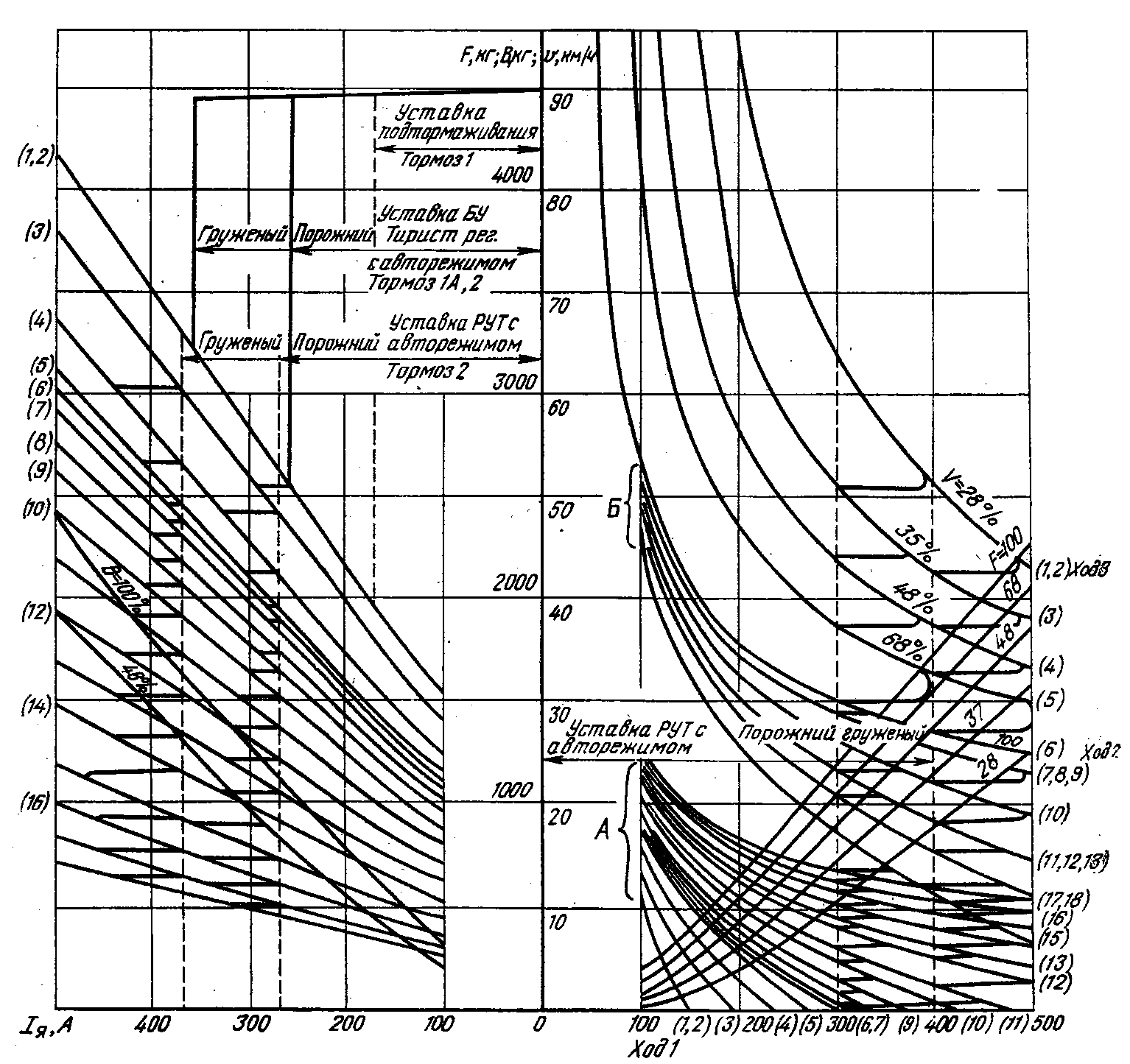
Работу силовой схемы отображает пуско-тормозная диаграмма, изображенная на. рис.117.
В схеме предусмотрено 36 позиций РК на тяговом режиме и 18 позиций РК на тормозном режиме. При этом на тяговом режиме РК вращается с 1-й по 18-ю позиции в прямом направлении (двигатели соединены последовательно), а после переключения групп тяговых двигателей на параллельное соединение РК вращается в обратном направлении с 18-й (19-я) по 1-ю(36-ю) позиции. На тормозном режиме РК вращается с 1-й по 18-ю позиции в прямом направлении.
Переключение групп тяговых двигателей с последовательного соединения на параллельное и с тормозного соединения на моторное осуществляется переключателем положений ППС и ПМТ.
При последовательном соединении групп тяговых двигателей предусмотрено 18 позиций РК: из них с 1-ой по 14-ю позиции – пусковые резисторные, 15-18-я позиции РК соответствует автоматической характеристике полного поля, 17-18-я позиция РК- являются переходными.
Переход групп тяговых двигателей с последовательного соединения на параллельное осуществляется по методу «моста». При переходе переключателя положений из положения ПС в ПП сначала должны замыкаться одновременно контакторы ПП2 и ПП3, а затем должен размыкаться контактор ЛК2, который рвет уравнительный ток (375-450А), вследствие чего этот контактор имеет дугогасительное устройство.
На параллельном соединении групп тяговых двигателей предусмотрено 18 позиций РК: из них 18-я (19-я) по 7-ю (30-ю)- пусковые резисторные, 6-я (31-я) позиция РК соответствует автоматической характеристике полного поля. Начиная с 5-й (32-я) по 2-ю (35-я) позиции РК происходит ослабление магнитного поля групп тяговых двигателей с 70% до 28% путем шунтирования кулачковыми элементами РК ступеней резистора ослабления поля. 2-я (35-я) и 1-я (36-я) позиции РК сдвоены, магнитное поле тяговых двигателей 28%.
1-я (36-я) позиция РК является автоматической характеристикой при параллельном соединении групп тяговых двигателей и ослабленном магнитном поле до 28%.
Торможение с высоких скоростей происходит путем плавного регулирования степени ослабления поля генераторов от 48% до 100% и корректировки тока якоря от величины 250-260А до 350-370А на полном поле, в зависимости от загрузки вагона, путем подключения параллельно обмоткам возбуждения генераторов контакторами КСБ1 и КСБ2 силовых тиристорных ключей. Плавное регулирование обеспечивает поддержание устойчивой работы двигателей по реактивной ЭДС и максимальному межламельному напряжению.
После выхода на 100% поле начинается электрическое реостатное торможение. Вращается РК с 1-й по 18-ю позиции, выводя ступени тормозных резисторов из цепи генераторов. На 17-й, 18-й позиции РК вступает в действие пневматический тормоз от вентиля замещения ВЗ№1.
Авторежимное устройство работает как в тяговом так и в тормозном режимах.
а) б)
Рис.117 Тормозная диаграмма (а) Пусковая диаграмма (б),
6.1 Пуско-тормозная диаграмма
6.1.1 Пусковая диаграмма
Пусковой диаграммой называется графическое изображение изменения скорости движения и силы тяги в зависимости от тока при пуске тягового двигателя.
Пусковая и тормозная диаграммы строятся для одного двигателя, представлены на рис.117.
Пусковая диаграмма имеет большое значение: по диаграмме можно определить величину тока, величину реализуемой мощности, скорости, ускорение пуска, тяговое усилие и время для каждой позиции в отдельности и за весь пуск: ускорение, реализуемый коэффициент сцепления.
На пусковой диаграмме графически располагаются скоростные характеристики V=f(I), которые начинаются снизу от первой реостатной позиции РК. Первая позиция РК рассчитывается на полностью введенные пусковые резисторы, исходя из необходимости реализации расчетного ускорения 0,3 м/с2 для плавности трогания:
Во вращающемся якоре
По мере увеличения скорости вращения якоря двигателя противо-ЭДС увеличивается, а ток уменьшается. Чтобы величину тока поддерживать на определенном уровне, т.е иметь постоянное тяговое усилие, необходимо постепенно уменьшать величину сопротивления пусковых резисторов R, доведя их величину до нуля. После первой позиции до достижения тока уставки РК должно вращаться хронометрически увеличивая ускорение с 0,3 до 1,2 м/с2.
Скоростные характеристики строятся по числу позиций реостатного контроллера на последовательном и параллельном соединении групп ТЭД, включая позиции ослабления поля.
Скоростные характеристики подразделяются на реостатные и безреостатные. Реостатными характеристиками являются такие, которые имеют определенную величину сопротивления резисторов и время движения по ним ограничивается их нагревом (не более 5 минут). Характеристики при полностью выведенных резисторах называются безреостатными (ходовыми).
Кроме скоростных характеристик на пусковой диаграмме строятся и тяговые характеристики F=f(I). Тяговые характеристики строятся слева-направо, с увеличением тока увеличивается и сила тяги. Эти характеристики располагаются одна под другой. Наверху располагается характеристика 100% поля ТЭД и по мере ослабления поля характеристики опускаются вниз. Количество их зависит от количества ступеней ослабления поля.
Величины пусковых резисторов подбираются таким образом, чтобы величина тока не была опасна для двигателя и не превышала в пределах поезда уставку автоматов защиты на тяговых подстанциях, а также чтобы сила тяги не превышала силу сцепления колес с рельсами, т.е на пусковые диаграммы накладывается ограничение по току, сцеплению и конструктивной скорости.
Некоторые позиции на параллельном соединении ТЭД могут быть сдвоены или строены, на них не происходит изменений в силовой цепи и выполнены с целью улучшения плавности пуска.
6.1.2 Тормозная диаграмма
Графическое изображение изменения скорости и тормозной силы от тока при торможении называется тормозной диаграммой.
Тормозная диаграмма изображена на рис.117.
Построение тормозной диаграммы производится в левом координатном углу: по оси абсцисс откладываются величины тока, по оси ординат- скорости и тормозной силы. Тормозные характеристики строятся по числу позиций РК. Кроме тормозных характеристик на тормозной диаграмме строятся характеристики тормозной силы при 48% и 100% полях.
С уменьшением скорости движения на каждой характеристике уменьшается ток и тормозная сила, а при переходе на следующую позицию ток скачком увеличивается, затем падает до величины уставки, и снова при переходе на следующую позицию скачком возрастает. При таком регулировании поддерживается среднее значение тормозного тока, которое устанавливает величину замедления 1,1 м/с2 установленную для вагонов 81-717.5М, 81-714.5М.
6.1.3 Порядок работы с пуско-тормозной диаграммой
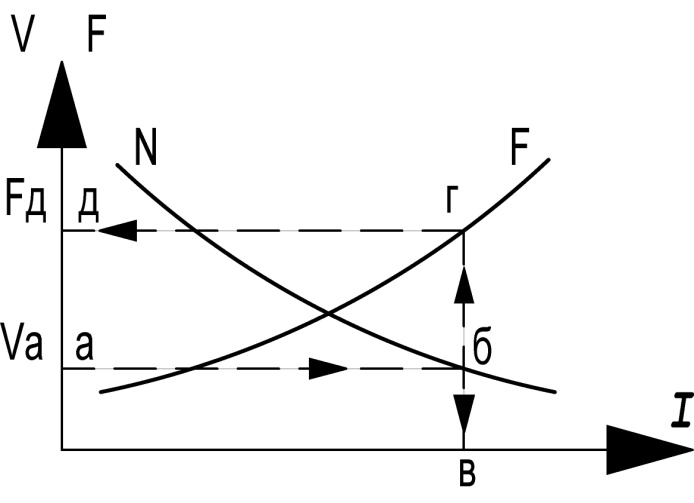
Рис.118
По заданной скорости движения Vа определить позицию РК, ток, силу тяги, реализуемый коэффициент сцепления, ускорение (см. рис.118).
От заданной скорости, которую находим на оси ординат точки а, проводим горизонтальную прямую до пересечения со скоростной характеристикой N, где проходит пилообразная кривая пуска (точка б) и находим номер позиции РК. Из точки б опускаем перпендикуляр на ось токов и точка в покажет величину тока тягового двигателя на данной скорости и позиции РК. Из точки в проводим вертикальную прямую до пересечения с характеристикой силы тяги F, соответствующего поля, точка г. Из точки г проводим горизонтальную прямую до пересечения с осью ординат и точка д покажет величину силы тяги.
Используя указанную схему можно на любой позиции РК определить скорость движения, ток, силу тяги, ускорение, реализуемый коэффициент сцепления.
6.2 Пуск тяговых двигателей в ходовом режиме
Если к зажимам неподвижного тягового двигателя приложить напряжение U (В), то при сопротивлении обмоток якоря и полюсов r (Ом) в цепи установится ток:
Сопротивление обмотки якоря и полюсов тягового двигателя ДК-117 составляет около 0,0691 Ом. Если соединить последовательно четыре тяговых двигателя и включить их в сеть с напряжением 750В, то по обмоткам неподвижных двигателей пройдет ток:
При таком токе вращающий момент будет очень велик, что вызовет разрушение частей самого двигателя, зубчатой передачи. Кроме того, обмотки двигателя при таком токе быстро нагреются и сгорят. Поэтому для ограничения величины тока при пуске последовательно в цепь двигателей вводится дополнительно резистор сопротивлением 4,176 Ом, которое значительно увеличивает сопротивление цепи и ограничивает ток до величины, при которой первоначально допустимая по плавности пуска ускорение 0,3 м/с2 будет обеспечено. Ток при этом будет равен:

Как только вагон тронется с места, т.е. якорь двигателя начнет вращаться, в проводниках обмотки якоря индуктируется ЭДС, которая будет направлена против тока и внешнего напряжения, подводимого к двигателю. Величина противо-ЭДС увеличивается с увеличением скорости вращения якоря двигателя.
Если обозначить величину противо-ЭДС, наводимую в обмотке якоря через Е, то величина тока вращающего двигателя определится выражением:
Из этой формулы следует, что при неизменном сопротивлении резисторов R и постоянном напряжении контактной сети U с увеличением скорости движения увеличивается и противо-ЭДС, а величина тока падает. Соответственно уменьшается и сила тяги. Чтобы обеспечить разгон поезда по установленной характеристике, нужно сначала повышать ток якоря двигателя путем уменьшения сопротивление пускового резистора. При этом величина ускорения увеличивается с 0,3 м/с2 до 1,1 -1,2 м/с2 с поддержанием постоянства темпом 0,6 м/с3.
Уменьшение сопротивления пускового резистора производится замыканием накоротко его секций кулачковыми элементами РК, что приводит к ступенчатому колебанию пускового тока, а, следовательно, и величины тягового усилия при разгоне.
Чтобы уменьшить величину колебания тока при пуске предусматривается достаточно большое количество ступеней сопротивлений.
Наиболее полно разгон двигателя отображает пусковая диаграмма, изображенная на рис.117.
6.3 Регулирование скорости вращения якорей ТЭД
Скорость вращения якоря электрической машины постоянного тока пропорциональна подведенному к двигателю напряжению и обратно пропорциональна его магнитному потоку. Поэтому регулирование скорости вращения якоря двигателя, следовательно, и скорости движения вагона осуществляется двумя способами:
-изменением величины напряжения на зажимах двигателя;
-изменением величины магнитного потока главных полюсов.
Регулирование скорости вращения якорей двигателей изменением величины напряжения происходит в результате выведения из цепи двигателей кулачковыми элементами РК секций пусковых резисторов, уменьшая величину их сопротивления до нуля и переключением групп двигателей с последовательного соединения на параллельное.
Обычно тяговые двигатели выполняются не на полное напряжение контактной сети, а рассчитываются на работу при последовательном соединении двух двигателей. Поэтому, при последовательном соединении четырех двигателей величина номинального напряжения на зажимах каждого двигателя при ходовом режиме будет равна:
При параллельном соединении двух групп двигателей каждая группа из двух ТЭД подключается к контактной сети и напряжение на зажимах каждого двигателя составит:
Регулирование скорости изменением величины магнитного потока двигателя. Изменение (ослабление) величины магнитного потока главных полюсов тягового двигателя осуществляется подключением параллельно этим обмоткам индуктивного шунта и резистора ослабления поля. Ток от якоря тягового двигателя распределяется по двум параллельным цепям. Часть тока идет по обмоткам возбуждения, а часть тока по шунтирующей цепочке. Тем самым уменьшается величина магнитного потока главных полюсов.
При вращении РК его кулачковыми элементами шунтируются секции резистора ослабления поля, в результате уменьшается сопротивление шунтирующей цепочки, по ней проходит большая часть тока по обмоткам возбуждения меньшая и магнитное поле двигателей ослабляется более глубоко.
Процесс изменения величины тока в обмотках возбуждения изображен на рис.119.
На вагонах моделей 81-717.5М, 81-714.5М двигатели имеют четыре ступени ослабления поля: 70%, 50%, 37% и 28%. Это означает, что если взять за 100% ток, проходящий по обмоткам якоря, то соответственно 70%, 50%, 37% и 28% этого тока будут проходить по обмоткам возбуждения, а остальная часть тока по шунтирующей цепочке. (Направление тока в режиме ослабления поля указано на рис.119 стрелками).
При переходе с полного поля на ослабленное должно произойти уменьшение магнитного потока в соответствии с установленной на характеристике двигателя степенью ослабления поля. На самом деле, из-за наличия вихревых токов в машине, при увеличении тока якоря магнитный поток остается практически неизменным. Увеличение тока якоря, в момент перехода, происходит лишь вследствие уменьшения сопротивления шунтирующем обмотку возбуждения. Заданная степень ослабления поля (например 70%), т.е. уменьшение магнитного потока главных полюсов, происходит после снижения тока якоря до величины, при которой произошло переключение ступени ослабления поля.
То же самое происходит при переходе на последующие ступени ослабления поля. Такое регулирование обеспечивает поддержание высокой мощности пуска вплоть до выхода на характеристику предельного ослабления поля 28%. Поэтому, результатом ступенчатого ослабления поля тяговых двигателей является увеличение тока якоря при сохранении в момент перехода с позиции на позицию магнитного потока, и, следовательно, увеличение вращающего момента якоря и мощности двигателя. В результате скорость движения увеличивается.
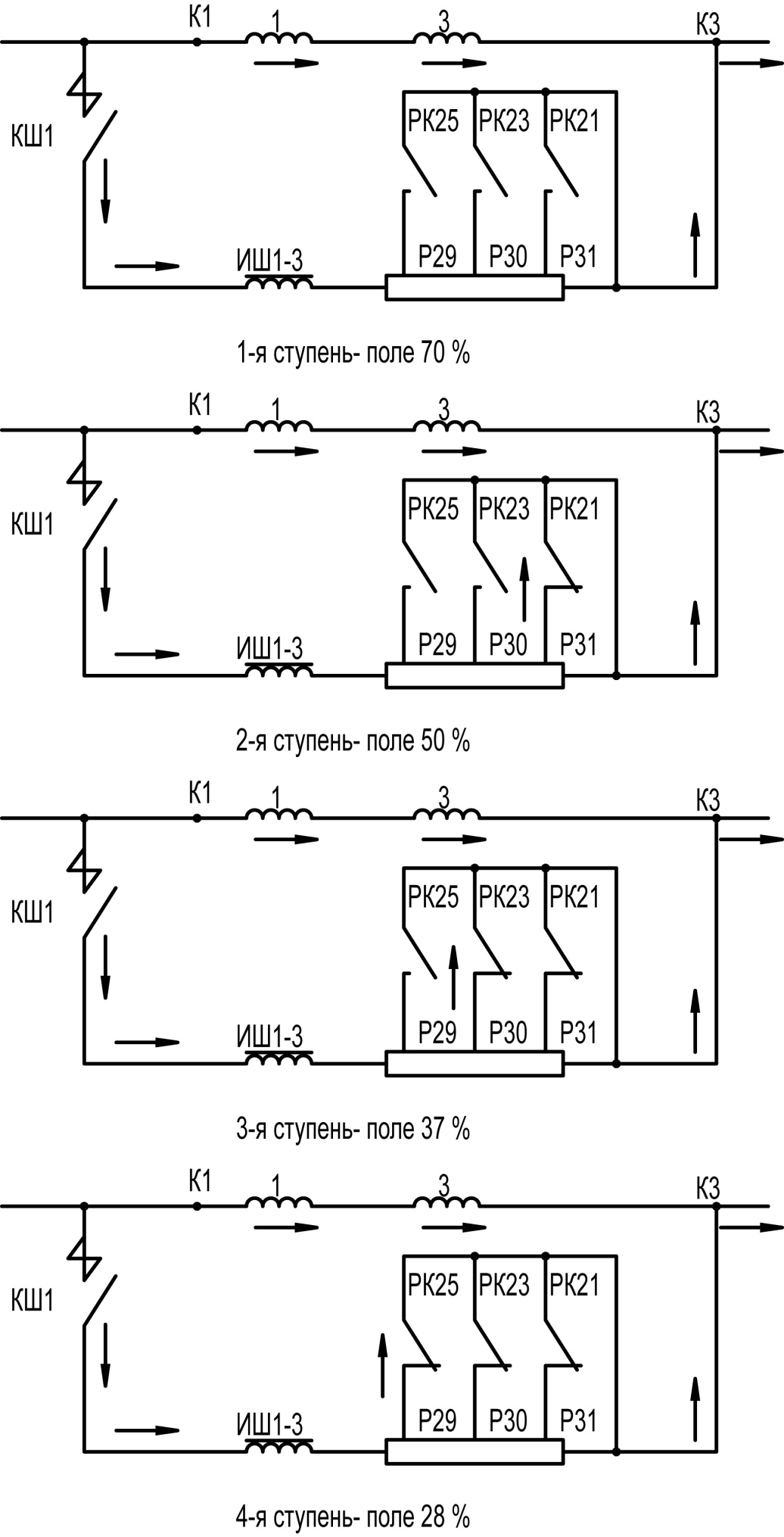
Рис.119 Варианты электрических схем ослабления поля обмотки возбуждения 1 и 3 ТЭД.
6.4 Переключение групп двигателей с последовательного соединения на параллельное
Наиболее простым способом перехода групп двигателей с последовательного соединения на параллельное является переход по схеме моста. Как видно из схемы (рис.120.а), четыре тяговых двигателя включены последовательно. Применяется два соединения двигателей: последовательное всех четырех и параллельное- две ветви по два двигателя в каждой. Пусковые цепи состоят из двух групп резисторов Р3-Р13 и Р23-Р17, контакторов РК, переключающих секции резисторов, линейных контакторов ЛК1-ЛК5, переходных контакторов ПП2, ПП3.
Пуск и разгон поезда производится автоматически выведением контакторами РК секций пусковых резисторов под контролем реле ускорения и торможения (РУТ), силовые катушки которого включены в силовую цепь двигателей.
На схеме рис.122 показана цепь тока на первой позиции РК, все двигатели соединены последовательно с полностью введенными пусковыми резисторами. На последующих реостатных позициях поочередным включениям контакторов РК, закорачиваются секции пусковых резисторов. Цепь тока в случае полностью выведенных реостатов показана на рис.120,а.
При дальнейшей работе схемы происходит переход двигателей по схеме «моста». Начинает работать переключатель положений ППС, который переключит группы двигателей с последовательного (ПС) соединения на параллельное (ПП). В момент перехода из ПС в ПП сначала одновременно замыкаются контакторы ПП2, ПП3.
Включением контакторов ПП2 и ПП3 параллельно группам двигателей подключаются резисторы Р17-Р23 и Р9-Р3, благодаря чему образуется «мост», два плеча которого составляют две группы двигателей, а два других плеча образуют последовательно соединенные между собой две группы пусковых резисторов. Группы двигателей с резисторами Р17-Р23 и Р9-Р3 составляют параллельную ветвь, средние точки этих резисторов соединены контактором ЛК2. По этой цепи протекает ток, определяемый как ток перехода.
 При повороте вала переключателя положений до позиции ПП контактор ЛК2 должен размыкаться, одновременно отключая ток (Iпер-Iсер). Образуются две параллельные группы двигателей с введенными пусковыми резисторами. (рис.120 в)
При повороте вала переключателя положений до позиции ПП контактор ЛК2 должен размыкаться, одновременно отключая ток (Iпер-Iсер). Образуются две параллельные группы двигателей с введенными пусковыми резисторами. (рис.120 в)
При последующем наборе позиций контакторами РК производится закорачивание секций пусковых резисторов в обеих группах двигателей до выхода на автоматическую характеристику двигателей.
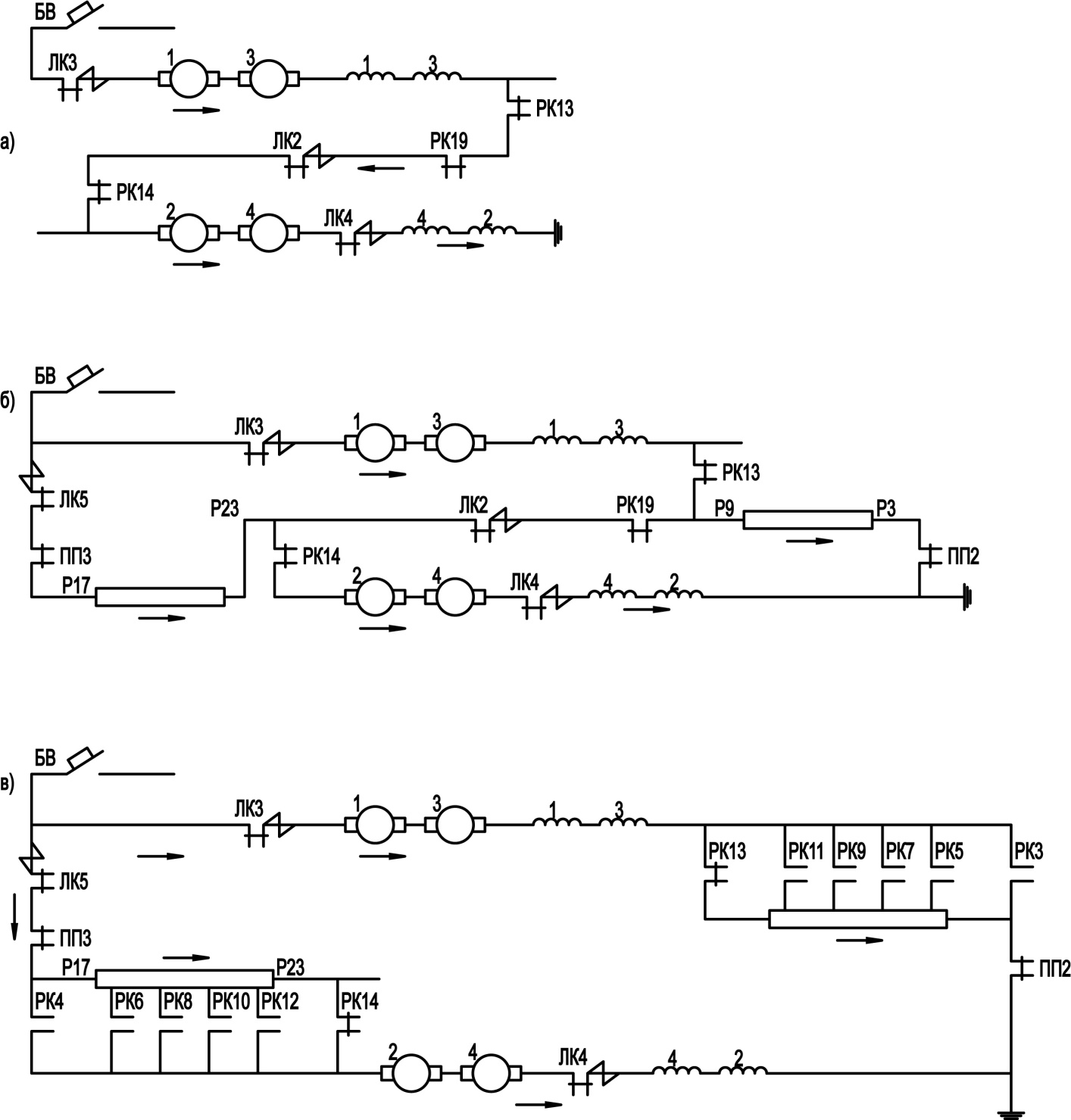
Рис.120 Упрощенная схема перехода групп двигателей с последовательного на параллельное соединение
6.5 Изменение направления вращения двигателей
Чтобы изменить направление движения вагона, необходимо изменить направление тока в обмотках главных полюсов или в обмотках якорей тяговых двигателей. При этом изменится взаимодействие между током, протекающим по проводникам обмотки якоря и магнитным потоком главных полюсов, в результате якорь двигателя будет вращаться в другую сторону, т.е. изменится направление движения вагона. На вагонах 81-717.5М, 81-714.5М изменяется направление тока в обмотках возбуждения тяговых двигателей. Изменение направления вращения якоря двигателя называется реверсированием.
Необходимо отметить, что реверсирование обмотки возбуждения является более предпочтительным, так как создает предельный режим для контакторов КЭ-47 реверсора и на вагонах типов А, Б, Г, Д всегда использовалось реверсирование обмотки возбуждения. На вагонах типа Е, Еж, где была смонтирована подмагничивающая обмотка, которая всегда должна действовать с основной обмоткой, ввели реверсирование обмотки якоря. На последующих вагонах Еж3, Ем508Т, 81-717(714) подмагничивающей обмотки в двигателях не стало, но реверсирование обмотки якоря осталось. В результате временами стали появляться негативные стороны реверсирования обмотки якоря. При торможении вагонов моделей Еж3, Ем508Т, 81-717(714) для работы с устройствами АРС в условиях установленных длин рельсовых цепей, тормозную мощность двигателей стали форсировать путем увеличения напряжения на одном двигателе до 500-600В на вагонах Еж3 и Ем508Т, и 500-750В на вагонах 81-717(714).
При последовательном соединении двух двигателей, в каждой цепи тормозного контура, напряжение между контактами реверсора может достигать 1200В на вагонах Еж3 и Ем508Т, и 1500В на вагонах 81-717(714). Так как раствор контактов контактора КЭ-47, устанавливаемого в реверсоре, был выбран исходя из расчетного напряжения 750В, в ряде случаев между контактами может происходить перекрытие дуги, а следовательно и ударное воздействие, которое приводит к разным последствиям, включая изгиб кронштейнов подвески редуктора.
На вагонах метро 81-717.5М, 81-714.5М вновь восстановили традиционную систему реверсирования обмотки возбуждения.
6.6 Электрическое реостатное торможение
&nbs
Дата добавления: 2017-02-13; просмотров: 2353;
Поиск по сайту
Узнать еще
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- Агротехнические методы (приемы) обработки почвы.
- Агротехнические требования к боронованию
- Агротехнические требования к ним.
- Агротехнические требования к операциям по уходу за растениями.
- В скобках указаны данные для металлов, полученных из вторичного сырья (лома).
- ВИДЫ ВСПАШКИ И АГРОТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ВСПАШКЕ
- Влияние подсочки на рост, плодоношение и технические качества древесины.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
