ОПТИМАЛЬНАЯ И СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ
Оптимальная фильтрация
Оптимальное выделение сигнала из шума можно проводить различными методами, в зависимости от того, какая задача ставится: обнаружение сигнала, сохранение формы сигнала и т.д. В каждом методе оптимальной фильтрации вводится понятие критерия оптимальности, согласно которому строится оптимальный алгоритм обработки сигнала.
Передаточная функция оптимального фильтра, предназначенного для обнаружения прямоугольного импульса длительностью 

Блок-схема устройства

Рис.9.1. Блок-схема оптимального фильтра, предназначенного для обнаружения прямоугольного импульса длительностью .  - интегратор, - элемент временной задержки.
- интегратор, - элемент временной задержки.
А Б
Рис. 9.2. Входной зашумленный прямоугольный импульсный сигнал (А) и выходной сигнал оптимального фильтра (Б).
Оптимальный фильтр в данном случае решает задачу обнаружения одиночного импульса конечной длительности. Форма и амплитуда импульса после фильтра будут искажены.
Оптимальный фильтр Колмогорова-Винера
Фильтры низкой частоты, высокой частоты и полосовые фильтры эффективны в том случае, когда частотные спектры сигнала и шума не перекрываются.
Наилучшее разделение сигнала и шума цифровыми методами обеспечивает оптимальный фильтр Колмогорова-Винера.
Частотная характеристика фильтра Колмогорова-Винера:
H(w) = Ws(w) / [Ws(w)+Wq(w)]
где Ws(w) и Wq(w) - энергетические спектры (плотности мощности) сигнала и помех.
На рис. 9.3 и 9.4 приведены примеры фильтрации сигналов вида одиночного импульса и синусоидального сигнала ограниченной длительности.
А Б
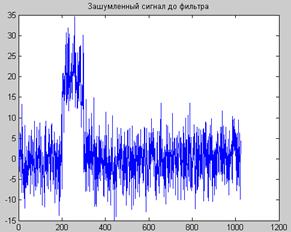
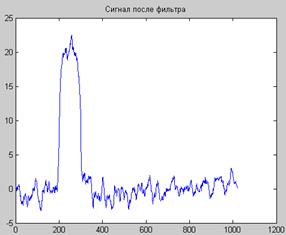
Рис. 9.3. Исходный сигнал с шумом (А) и после фильтра (Б).
А Б
 |  |
Рис. 9.4. Частотная характеристика оптимального фильтра (А) и сигнал после фильтрации гармонического сигнала (Б).
Программа оптимального фильтра Колмогорова - Винера
Y=fft(s1,N)/N; %БПФ сигнала без шума
SS1=Y.*conj(Y)/N; %спектр мощности сигнала без шума
Y1=fft(q,N)/L; %БПФ шума
SS2=Y1.*conj(Y1)/N; %спектр мощности шума
for i=1:N
H(i)=SS1(i)/(SS1(i)+SS2(i)); %передаточная функция оптимального %фильтра в частотной области
end
i=1:N
XX1=fft(x1,N); %частотный спектр сигнала с шумом
Z=ifft(XX1.*H); %свертка зашумленного сигнала с частотной характеристикой фильтра
Согласованная фильтрация
Цифровая обработка сигналов решает две основные задачи: обнаружение и определение параметров зашумленного сигнала. Задача может состоять и только в обнаружении сигнала, вид которого известен. В этом случае может быть использована согласованная фильтрация, т.е. применен фильтр, «настроенный» точно под ожидаемый вид сигнала.
Для того, чтобы вычислить выходной сигнал фильтра, нужно выполнить операцию свертки массива частотного спектра F входного сигнала с частотной характеристикой фильтра H с помощью функции обратного преобразования Фурье, например, Z=ifft(F.*H), или операции свертки массива входного сигнала x с импульсным откликом фильтра h, например: Z = conv(x,h).
Частотная характеристика согласованного фильтра вычисляется "по частотному спектру сигнала" как комплексно сопряженный массив с помощью функции conj, например: Kf=conj(F). Здесь F- частотный спектр сигнала, Kf-частотная характеристика фильтра, согласованного с этим сигналом.
Ниже на рис. 9.5 приведен пример использования согласованного фильтра для определения временного интервала между радиоимпульсами.
А Б
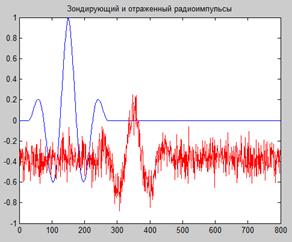
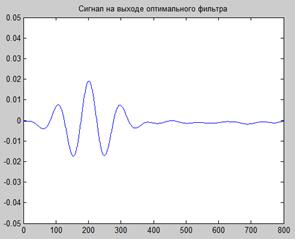
Рис.9.5. Зондирующий и отраженный сигналы (А) и сигнал на выходе согласованного фильтра.
Положение максимума выходного сигнала согласованного фильтра показывает величину временной задержки между зондирующим и отраженным импульсами.
Фрагмент программы согласованного фильтра для определения временной задержки между импульсами можеи иметь вид:
F1=fft(x,kt); % БПФ зондирующего радиоимпульса
Kf=conj(F1); % частотная характеристика согласованного фильтра
F2=fft(y,kt); % БПФ отраженного радиоимпульса
Fv=F2.*Kf; % свертка спектра отраженного радиоимпульса с частотной характеристикой согласованного фильтра.
Sv=real(ifft(Fv)); % вычисление сигнала после фильтра
Ниже приведен еще один пример использования согласованного фильтра для обнаружения линейно-частотно-модулированного сигнала (ЛЧМ-сигнала). Здесь цифровая обработка применяется не к самому ЛЧМ-сигналу (рис.9.6А), а к его частотному спектру, который представляет собой широкополосный сигнал в частотной области ( рис. 9.6Б).
А Б

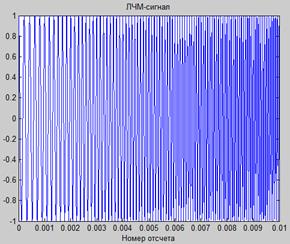
Рис. 9.6. Вид ЛЧМ-сигнала (А) и его частотного спектра (Б)
На рис. 9.7А приведен вид сигнала на выходе согласованного фильтра для случая, когда ЛЧМ-сигнал точно соответствует по форме тому, на который настроен фильтр. При зашумлении ЛЧМ-сигнала или его спектра форма отклика на выходе согласованного фильтра сохранится (см. рис. 9.7Б), что и дает возможность обнаруживать ЛЧМ-сигнал на фоне шумов .
Обратите внимание, что форма сигнала, полученного с выхода согласованного фильтра, не имеет ничего общего с формой ЛЧМ-сигнала (и определить параметры ЛЧМ-сигнала по нему невозможно). Кроме того, если


Рис. 9.7. Пример выходного сигнала согласованного фильтра при незашумленном (А) и зашумленном (Б) сигнале на входе
ЛЧМ-сигнал будет отличаться по ширине полосы или по центральной частоте от того, на который "настроен" согласованный фильтр, то определить параметры ЛЧМ-сигнала по выходному сигналу согласованного фильтра будет еще более сложно (см. рис. 9.6). На рис. 9.8А приведен вид выходного сигнала согласованного фильтра для случая, когда ЛЧМ-сигнал отличается по ширине полосы, на рис. 9.8Б - по ширине полосы и по центральной частоте.

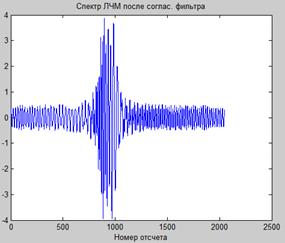
Рис. 9.8. Вид выходного сигнала согласованного фильтра для случаев, когда ЛЧМ-сигнал отличается по ширине полосы (А) и по ширине полосы и по центральной частоте (Б).
Дата добавления: 2017-01-16; просмотров: 6798;
Поиск по сайту
Узнать еще
- Глава 9. ЦИФРОВАЯ ФИЛЬТРАЦИЯ
- Двухфазная фильтрация несмешивающихся жидкостей, вытеснение нефти водой. Функция Бакли – Леверетта.
- Инерционность системы и фильтрация сигнала.
- Как распределяется суммарный подогрев между ступенями? Как определяется оптимальная температура питательной воды парогенератора?
- Каковы достоинства и недостатки регенеративных подогревателей смешивающего и поверхностного типов? Как определяется расход отборного пара в них и оптимальная величина недогрева?
- Квазиоптимальная фильтрация
- Клубочковая фильтрация
- Клубочковая фильтрация

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
