ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ ИНТЕРВАЛОВ МЕЖДУ РАДИОИМПУЛЬСАМИ
Известный способ измерения расстояния до объекта основан на измерении времени задержки отражённого радиолокационного сигнала от возбуждающего радиоимпульса. Такой способ применяется, например, в электромагнитно-акустических (ЭМА) толщиномерах, использующих принцип измерения времени прохождения ультразвукового импульса, порождаемого радиоимпульсом, через металлическое изделие.
В этом случае источник радиоимпульса помещается у одной поверхности металлического изделия, и регистрируется сигнал, отраженный от другой поверхности. По времени задержки отраженного сигнала от зондирующего определяется толщина металла. При коррозии металлических изделий отраженный сигнал оказывается значительно зашумлен (см. рис. 12.1А), что приводит к уменьшению точности определения временной задержки и, следовательно, к уменьшению точности определения толщины металла.
Для улучшения отношения сигнал/шум в отраженном сигнале могут применяться различные методы, такие как временная фильтрация (накопление), оптимальная частотная фильтрация, прямое и обратное преобразование Фурье, корреляционный анализ.
Влияние шума в регистрируемом отраженном сигнале во временной области можно значительно уменьшать за счет многократного повторения измерения и синхронного накопления отраженных сигналов (см. рис. 12.1Б).
 А Б
А Б
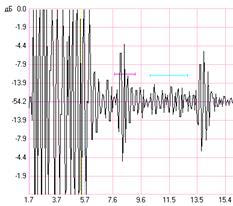
Рис. 12.1. Исходный (А) и накопленный (Б) отраженный сигнал ЭМА толщиномера. Количество накоплений – 16.
Однако, увеличение количества накоплений позволяет улучшать отношение сигнал/шум без искажения формы и уменьшения амплитуды накопленного отраженного сигнала лишь до некоторого предела. После этого предела накопление уже не приносит ощутимого улучшения качества. В частности, при большом времени накопления на отраженный сигнал начинают влиять постепенные изменения параметров узлов, входящих в состав прибора для измерения толщины металла. При ограничении времени проведения анализа количество возможных накоплений сигнала должно быть ограничено или вообще должно отсутствовать. Поэтому задача повышения точности измерения временного сдвига зашумленных эхо-сигналов актуальна.
Использование традиционного подхода определения временного сдвига по максимуму отраженного сигнала или автокорреляционной функции для зашумленного сигнала не позволяет получить точное значение временного сдвига, так как положение максимумов при этом не может быть определено точно. Но, поскольку форма и начальная фаза отраженных сигналов известны, это дает возможность создать эталонные сигналы, соответствующие ожидаемому отраженному сигналу по форме и начальной фазе, и произвести их корреляционное сравнение. Ниже приведен пример программного формирования сигнала эталона. На рис. 12.2 приведен типичный вид зондирующего и отраженного импульсов.
for i=1:N;
if(i<(shift-h)|(i>shift+h))
x(i)= 0;
end
if(i>(shift-h)&(i<=shift))
x(i)= sin(2*3.14*f*(i-shift+h)/sf)*(exp((i-shift+h)/k2)-1);
end
if ((i>shift)&(i<(shift+h)))
x(i)=sin(2*3.14*f*(shift+h-i)/sf)*(exp((shift+h-i)/k2)-1);
end
где
f - частота несущей радиосигнала;
k2 – коэффициент, определяющий масштаб и крутизну фронта и спада сигнала и эталонов;
sf - частота отсчетов при измерении;
h - полуширина зондирующего и отраженного радиоимпульса. В приведенном примере h=kt/6;
shift - величина сдвига
N - кол-во отсчетов при регистрации отраженного сигнала
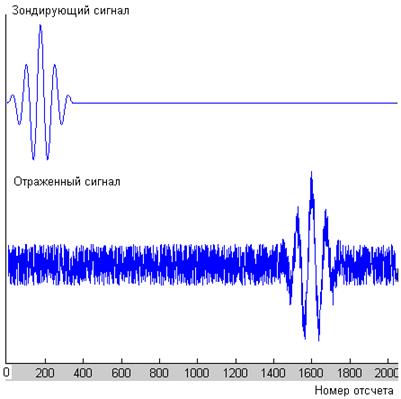
Рис. 12.2. Типичный вид зондирующего и отраженного импульсов.
Параметры: f=2660; k2= 300; sf=200000; h=170; shift=180, N=2048;
Коэффициент корреляции отраженного сигнала с эталонным сигналом будет равен единице, если частоты отраженного сигнала и эталонного сигнала равны и отраженный сигнал не зашумлен. Поэтому при отсутствии шумов найти временной сдвиг отраженного сигнала можно, производя корреляционное сравнение с эталонными сигналами, временной сдвиг эталонных сигналов подбирать до выполнения условия, когда коэффициент корреляции будет равен единице. Однако коэффициент корреляции уменьшается как при разнице времени сдвига эхо и эталонного сигналов, так и при совпадении времени сдвига, но из-за наличия шума. Поэтому таким способом определить временной сдвиг зашумленного отраженного сигнала также невозможно.
Для определения временного сдвига может быть использован согласованный фильтр, описанный в лекции 9. Согласованный фильтр обеспечивает получение точного результата измерения временного сдвига даже при значительной зашумлённости сигналов. Однако результат измерения может быть только целым числом. Например, если временной сдвиг равен 50.45, то результат измерения с помощью согласованного фильтра будет равен 50.
В [17,18] описан более совершенный способ измерения временных интервалов между двумя радиоимпульсами, в [19] - программа, реализующая этот способ.
Более точное по сравнению с известными способами определение времени сдвига отражённого сигнала достигается за счет сочетания положительных качеств известного подхода, позволяющего приблизительно определить временную задержку, и дополнительной цифровой обработки, включающей механизмы генерации серий эталонных сигналов, корреляционное сравнение отражённого сигнала с эталонами, сплайн-интерполяцию, передискретизацию.
Идея предлагаемого алгоритма цифровой обработки в данном случае заключается в том, что в небольшой окрестности от предполагаемого временного сдвига сигнала (приближенное значение временного сдвига сигнала может быть найдено с помощью автокорреляции или по максимуму амплитуды) вычисляются коэффициенты корреляции с несколькими эталонными сигналами в некоторой окрестности от приближенного значения временного сдвига, затем с помощью сплайн-интерполяции и передискретизации строится функция, выражающая зависимость коэффициента корреляции от временного сдвига эталонов и находится максимум этой функции, по положению максимума определяется уточненное значение временного сдвига эталонного сигнала. Функция, построенная таким образом, имеет вид параболы 6 порядка с явно выраженным максимумом (см. рис. 12.3А) как в случае незашумленного так и зашумленного сигнала (см. рис. 12.3Б), что и позволяет определить временной сдвиг эхо-сигнала более точно. При зашумленности отраженного сигнала форма функции сохраняется, уменьшается лишь абсолютное значение максимума.
 А Б
А Б
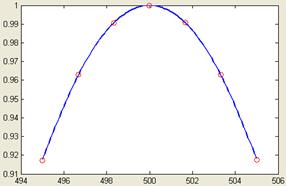
Рис. 12.3. Зависимость коэффициента корреляции от временного сдвига при отсутствии шума (А) и при отношении сигнал/шум 2/1 (Б). Точное значение времени сдвига равно 500. Вычисленное значение времени сдвига равно 499.998 (А) и 500.327 (Б ). Заданная точность вычисления – 0.001. Для построения графиков использована функция сплайн-аппроксимации spaps в MATLAB.
Точность определения временного сдвига эхо-сигнала тем выше, чем ближе начальное приближение к истинному значению. Поэтому предлагаемый алгоритм применяет итерационное вычисление, на каждом этапе итерации в качестве начального приближения используется уточненное значение временного сдвига, полученное на предыдущем этапе. В качестве первого приближения берется временной сдвиг, определенный по максимуму амплитуды эхо-сигнала.
Краткое описание алгоритма.
1) Получение рабочего числового массива отраженного сигнала X[i], i =0,...n.
2) Определение номера элемента jмакс числового массива, соответствующего максимальному значению X. Найденная величина jмакс соответствует приближенному значению центра отраженного сигнала;
3) Создание 2k +1 эталонных числовых массивов по форме соответствующих зондирующему сигналу, центры которых смещены по отношению к центру jмакс на величину jмакс *(s/k-1)*b, где s =0, 1, 2,... 2k, b=0..1, значение b задается с учетом возможной погрешности приближенного значения временного сдвига. Например, b=0.1, если погрешность оценки приближенного значения временного сдвига не превышает 10%.
4) Вычисление коэффициентов корреляции числового массива отраженного сигнала со всеми эталонными и формирование числового массива коэффициентов корреляции KK[m], где m = jmax + jmax *(s/k-1)*b.
5) Выполнение аппроксимации для массива KK[m] (Нахождение непрерывной функциональной зависимости F (m), соответствующей массиву KK[m]).
6) Выполнение передискретизации на основе найденной функциональной зависимости F (m) для массива KK[m] с увеличением количества элементов массива в R раз, т. е. формирование массива KK1[m1 ], где m1= jmax + jmax *(s1/(k*r)-1)*b, s1 = 0,1,2,…2k*r, r – коэффициент передискретизации.
7) Нахождение значения m1макс, соответствующего максимальному значению KK1. Значение m1макс будет представлять вещественное число, соответствующее уточненному (в общем случае нецелому) значению положения центра отраженного сигнала (или, что то же, временной задержки центра отраженного сигнала от центра зондирующего сигнала).
8) Вычисление разности err = m1макс − jмакс.
9) Если err < errдоп, то jмакс = m1макс и переход к п.3., иначе переход к п. 10.
10) Вывод найденного значения временного сдвига отраженного сигнала относительно зондирующего задержки Т =m1макс*dt , где dt — шаг дискретности по времени при измерении отраженного сигнала.
Точность определения основной частоты при использовании предложенного алгоритма зависит от значений k и r и тем выше, чем они больше, однако, если анализируемый сигнал зашумлен, существенное ее увеличение происходит при росте k и r лишь до некоторого предела. В частности, при соотношении сигнал/шум >2/1, k =3 и r = 10, как можно установить путем моделирования, оказывается наилучшим выбором по критерию точность/время анализа.
Количество итераций для расчета временной задержки с заданной точностью с помощью описанного алгоритма зависит от того, насколько близко к фактической задержке будет находиться начальное приближение.
На рис. 12.4 приведена экспериментально полученная в режиме компьютерного моделирования зависимость погрешности определения временного сдвига зашумленных эхо-сигналов при частоте радиолокационного сигнала 2660 кГц и частоте отсчетов 200000 кГц. Генерация нормально распределенного шума выполнена с помощью функции rand в среде MATLAB с амплитудой, равной 0.5, при амплитуде эхо-сигнала, равной 1. Усреднение произведено по 20 реализациям, значение временного сдвига изменялось с шагом 1.
А Б

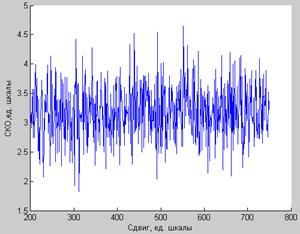
Рис. 9.4. Среднеквадратическое отклонение от среднего значения вычисленного временного сдвига при использовании традиционного (А) и описанного выше (Б) алгоритмов.
Максимальное среднеквадратическое значение погрешности определения временного сдвига при использовании описанного выше алгоритма, как следует из приведенного рис. 1.28, в этих условиях не превышает 0,65 ед. шкалы, а при использовании традиционного алгоритма - 4,5 ед. шкалы. С учетом диапазона шкалы измерения от 200 до 800 относительная среднеквадратическая погрешность измерения составит не более 0.3% при использовании описанного выше алгоритма и 2.25% - при использовании традиционного алгоритма. Эффективность описанного выше алгоритма возрастает с увеличением зашумленности эхо-сигнала. Временной сдвиг эхо-сигнала может быть вычислен с высокой точностью даже в условиях, когда амплитуда шума превышает амплитуду эхо-сигнала в 1,5-2 раза. Обработка таких значительно зашумленных эхо-сигналов должна производиться при b>>0.1 и k>>3. При  погрешность определения приближенного значения временного сдвига не имеет значения. На рис. 12.5 приведен пример зависимости коэффициента корреляции от временного сдвига при b=0.9, k=50, на этапе первой итерации (А) и последней (Б). Отношение сигнал/шум в эхо-сигнале – 1/2.
погрешность определения приближенного значения временного сдвига не имеет значения. На рис. 12.5 приведен пример зависимости коэффициента корреляции от временного сдвига при b=0.9, k=50, на этапе первой итерации (А) и последней (Б). Отношение сигнал/шум в эхо-сигнале – 1/2.
А Б
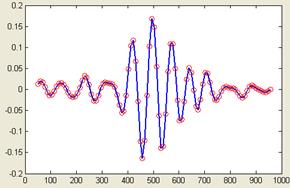
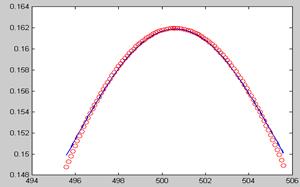
Рис.12.5. Зависимость коэффициента корреляции от временного сдвига при b=0.9, k=50, отношении сигнал/шум 1/2 на этапе первой итерации (А) и последней (Б).
Описанный алгоритм исследован в режиме компьютерного моделирования с нормальным (функция randn MATLAB) и белым шумом (функция awgn MATLAB). Программа обработки данных была реализована в среде MATLAB.
Эффективность описанных выше алгоритма и программы измерения временной задержки отраженных радиолокационных сигналов установлена аналитически в [3] путем моделирования. Моделируемые отражённые сигналы были подобны реально получаемым в ЭМА толщиномере, приведенным на рис. 12.1.
Зависимость коэффициента корреляции от рассогласования гармонических сигналов во времени и оценка положения максимума этой зависимости получена аналитически в непрерывной форме для сигнала x и эталона y:  , имеющих одинаковое количество периодов n на интервале наблюдения T, и отличающихся сдвигом по времени.
, имеющих одинаковое количество периодов n на интервале наблюдения T, и отличающихся сдвигом по времени.
Коэффициент корреляции r, как известно, вычисляется как отношение коэффициента ковариации kxy к нормирующему множителю:
Коэффициент ковариации сигналов x и y вычислится по формуле:
Введем обозначение:  , тогда окончательно получим:
, тогда окончательно получим:

Для получения нормирующего множителя вычислим 
Введем обозначение в последнем выражении. В результате получим

Окончательно выражение для коэффициента корреляции будет иметь вид:
Именно эта зависимость имеет вид параболы 6 порядка, обращенной вершиной вверх, принимающей максимальное значение при  при любых (целых и нецелых) значениях n (рис. 12.6А).
при любых (целых и нецелых) значениях n (рис. 12.6А).
При  знаменатель будет приблизительно равен ½ и выражение приближенно может быть записано как
знаменатель будет приблизительно равен ½ и выражение приближенно может быть записано как

Для того, чтобы аналитически найти положение максимума, нужно вычислить первую производную последнего выражения и приравнять ее нулю:

Решение последнего тригонометрического уравнения также приводит к при любых (целых и нецелых) значениях n (рис 12.6Б), что доказывает получение точного значения временного сдвига радиолокационных эхо-сигналов предлагаемым способом.
А Б

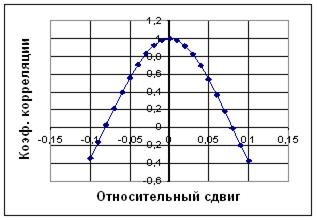
Рис. 12.6. Пример аналитической зависимости коэффициента корреляции (А) и первой производной (Б) от относительного временного сдвига  при n=4.2.
при n=4.2.
Дата добавления: 2017-01-16; просмотров: 3484;
Поиск по сайту
Узнать еще
- II. Степень насыщенности, определяемая природой связи между атомами углерода.
- II. Участие Республики Казахстан в международных договорах
- II.3.2. Определение резус-совместимости при переливании крови
- IV. Классификация обязательств РК по международным договорам
- IV. Экспериментальное определение параметров схемы замещения трансформаторов.
- N в процессе иммунного ответа антигенам 1-го класса принадлежит ведущая роль во взаимодействии между клеткой-эффектором (Т киллеры) и клеткой-«мишенью»
- VI. Определение девиации по сличению показаний двух компасов
- VI. Примеры мер по реализации международных обязательств

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
