КЛЮЧЕВЫЕ ОПЕРАЦИИ ЦОС
Многочисленные алгоритмы ЦОС, как правило, построены на комбинациях достаточно небольшого набора типовых цифровых операций, к основным из которых относятся: свертка (конволюция), корреляция, фильтрация, функциональные преобразования, модуляция.
Линейная свертка – основная операция ЦОС. Применяется для вычисления выходного сигнала y(t) линейной системы по заданному входному x(t) и известному импульсному отклику h(t) (рис.6.1).
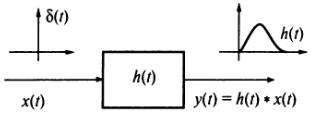
Рис. 6.1.
Импульсный отклик описывает реакцию линейной системы (объекта) на единичный импульс на входе, ширина которого во времени,  , а площадь равна 1. Линейными называются системы, для которых справедлив принцип суперпозиции (отклик на сумму входных сигналов равен сумме откликов на эти сигналы по отдельности) и принцип однородности (изменение амплитуды входного сигнала вызывает пропорциональное изменение амплитуды выходного сигнала). Для реальных систем (объектов) свойство линейности может выполняться приближенно
, а площадь равна 1. Линейными называются системы, для которых справедлив принцип суперпозиции (отклик на сумму входных сигналов равен сумме откликов на эти сигналы по отдельности) и принцип однородности (изменение амплитуды входного сигнала вызывает пропорциональное изменение амплитуды выходного сигнала). Для реальных систем (объектов) свойство линейности может выполняться приближенно
В системах цифровой обработки дискретизированных сигналов входные и выходные сигналы представлены набором дискретных отсчетов x(k) и y(k), k=1…K, соответствующим мгновенным значениям сигнала x(tk) и y(tk). Для линейных систем выходной сигнал объекта может быть представлен как суперпозиция реакций на отдельные дискретные сигналы.

Рис. 6.2
Импульсный отклик также представлен набором дискретных значений h(n). Роль объекта может выполнять цифровой фильтр.
Для h(n) и y(k) длиной соответственно N и K свертка определяется выражением:
y(k) =  h(n) x(k-n)= h(n) ③ x(k),
h(n) x(k-n)= h(n) ③ x(k),
где ③ или * - символьные обозначения операции свертки.
Как правило, в системах обработки одна из последовательностей
x(k) представляет собой обрабатываемые данные (сигнал на входе системы),
вторая h(n) – импульсный отклик системы, а y(k) – выходной сигнал системы.
Пример выполнения операции свертки для непрерывного и дискретизированного сигнала приведен на рис. 6.3.
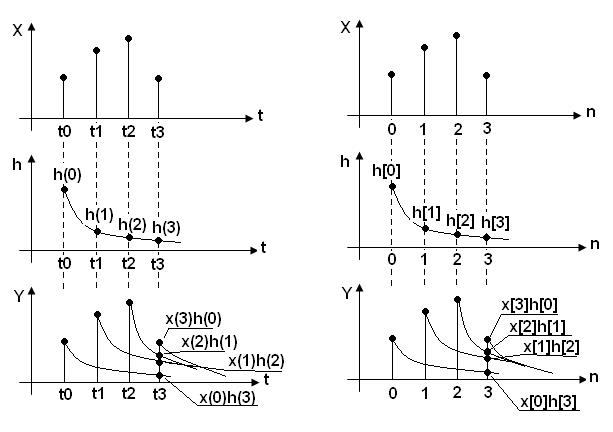
Рис. 6.3
Y(t3)=x(t3)h(t0)+x(t2)h(t1)+x(t1)h(t2)+x(t0)h(t3) Y[3]=x[3]h[0]+x[2]h[1]+x[1]h[2]+x[0]h[3]
В компьютерных системах с памятью для входных данных оператор h(n) может быть двусторонним от –N до +N, например – симметричным h(-n) = h(n),
 А что позволяет получать выходные данные без сдвига относительно входных. При строго корректной свертке с обработкой всех отсчетов входных данных размер выходного массива равен K+2N-1, и должны задаваться начальные условия по отсчетам x(k) для значений x(0-n) до n=N2, и конечные для x(K+n) до n=N1. Пример выполнения свертки приведен на рис. 6.4..
А что позволяет получать выходные данные без сдвига относительно входных. При строго корректной свертке с обработкой всех отсчетов входных данных размер выходного массива равен K+2N-1, и должны задаваться начальные условия по отсчетам x(k) для значений x(0-n) до n=N2, и конечные для x(K+n) до n=N1. Пример выполнения свертки приведен на рис. 6.4..
Б В

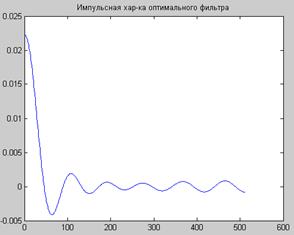
Рис. 6.4 Пример выполнения свертки. Объект – оптимальный фильтр Колмогорова-Винера.
Преобразование свертки однозначно определяет выходной сигнал для установленного значения входного сигнала при известном импульсном отклике системы. Обратная задача (деконволюция) - определение функции x(k) по функциям y(k) и h(n), имеет решение только при определенных условиях. Это объясняется тем, что свертка может существенно изменить частотный спектр сигнала y(k) и восстановление функции x(k) становится невозможным, если определенные частоты ее спектра в сигнале y(k) полностью утрачены.
Корреляция существует в двух формах: взаимной корреляции и автокорреляции.
Взаимно-корреляционная функция (ВКФ, cross-correlation function - CCF), и ее частный случай для центрированных сигналов функция взаимной ковариации (ФВК) – это показатель степени сходства формы и свойств двух сигналов. Для двух последовательностей x(k) и y(k) длиной К с нулевыми средними значениями оценка взаимной ковариации выполняется по формулам:
Kxy(n) = (1/(K-n+1))  x(k) y(k+n), n = 0, 1, 2, … N (2)
x(k) y(k+n), n = 0, 1, 2, … N (2)
Kxy(n) = (1/(K-n+1)) x(k-n) y(k), n = 0, -1, -2, …-N (2')
Функция взаимной корреляции может быть использована в радиолокации для измерения временных интервалов между зондирующим и отраженным радиоимпульсами. Измерение дальности сводится к фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала, измерению временного интервала между этими моментами. Время запаздывания Tз отраженного импульса относительно зондирующего с учетом известной скорости распространения радиоволн C позволяет определять расстояние D до объекта D=Tз*С/2.Отраженный сигнал, как правило, зашумлен.

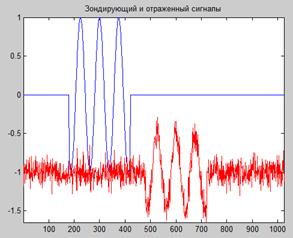
Рис. 6.5. Функция взаимной корреляции. Зондирующий эталонный и зашумленный отраженный сигналы имеют нулевые средние, отраженный сигнал смещен (по оси Y) при отображении.
Пример определения сдвига между двумя детерминированными сигналами, представленными радиоимпульсами, по максимуму ФВК приведен на рис. 6.5. В принципе, по максимуму ФВК может определяться и сдвиг между сигналами, достаточно различными по форме. Существенно, что уровень зашумленности сигнала взаимной корреляции значительно ниже, чем зашумленность исходных сигналов.
Однако по мере возрастания сдвига n и уменьшения количества суммируемых членов в формуле за счет шумовых сигналов существенно нарастает ошибка оценки ФВК, которая к тому же увеличивается при малом количестве отсчетов.
Относительный количественный показатель степени сходства двух сигналов x(k) и y(k) - функция взаимных корреляционных коэффициентов rxy(n). Она вычисляется через центрированные значения сигналов (для вычисления взаимной ковариации нецентрированных сигналов достаточно центрировать только один из них), и нормируется на произведение значений стандартов (средних квадратических вариаций) функций x(k) и y(k):
rxy(n) = Kxy(n)/(sx sy)
sx2 = Kxx(0) = (1/(K+1))  (x(k))2, sy2 = Kyy(0) = (1/(K+1)) (y(k))2
(x(k))2, sy2 = Kyy(0) = (1/(K+1)) (y(k))2
Интервал изменения значений корреляционных коэффициентов при сдвигах n может изменяться от –1 (полная обратная корреляция) до 1 (полное сходство или стопроцентная корреляция). При сдвигах n, на которых наблюдаются нулевые значения rxy(n), сигналы некоррелированны. Коэффициент взаимной корреляции позволяет устанавливать наличие определенной связи между сигналами вне зависимости от физических свойств сигналов и их величины.
Автокорреляционная функция (АКФ, correlation function, CF) является частным случаем ВКФ для одного сигнала и представляет собой скалярное произведение сигнала и его копии в функциональной зависимости от переменной величины значения сдвига:
Bx(n) = (1/(K-n+1))  x(k) x(k+n), n = 0, 1, 2, …N
x(k) x(k+n), n = 0, 1, 2, …N
АКФ имеет максимальное значение при n=0 (умножение сигнала на самого себя), является четной функцией Bxy(-n)=Bxy(n), и значения АКФ для отрицательных координат обычно не вычисляются. АКФ центрированного сигнала Kx(n) представляет собой функцию автоковариации (ФАК). ФАК, нормированная на свое значение Kx(0)=sx2 в n=0:
rx(n) = Kx (n)/Kx(0)
называется функцией автокорреляционных коэффициентов. В качестве примера на рис. 6.6 приведен радиоимпульс и АКФ.
А Б


Рис. 6.6. Радиоимпульс (А) и автокорреляционная функция (Б).
При конечной длительности радиоимпульса длительность АКФ также конечна, и равна удвоенным значениям длительности радиоимпульса (при сдвиге копии конечного импульса на интервал его длительности как влево, так и вправо, произведение импульса со своей копией становится равным нулю). Частота колебаний АКФ радиоимпульса равна частоте колебаний заполнения радиоимпульса, а уровень шума АКФ значительно меньше, чем в исходном сигнале. Функция автокорреляции радиоимпульса позволяет более точно определять несущую частоту радиоимпульса в условиях зашумленности анализируемого радиосигнала.
Линейная цифровая фильтрация является одной из операций ЦОС, имеющих первостепенное значение.
Цифровая фильтрация сигналов решает задачи обнаружения и определения параметров информативных сигналов и изображений, искаженных шумами и помехами. Для этой цели используются различные средства:
· цифровые частотные фильтры (высокой частоты, низкой частоты, полосовые фильтры);
· фильтры скользящего среднего и медианные фильтры;
· оптимальные фильтры (фильтр Колмогорова-Винера, LMS и RLS-фильтры) [2];
· адаптивные фильтры (функцию адаптивных фильтров могут выполнять фильтр Колмогорова-Винера, LMS и RLS-фильтры);
· фильтры БПФ-ОБПФ.
Цифровая фильтрация дискретизированных сигналов может быть реализована программно с помощью компьютера или микропроцессора и аппаратно с помощью программируемых логических интегральных схем (ПЛИС).
Линейная цифровая фильтрация определяется как свертка сигнала с импульсной характеристикой фильтра
y(k) =  h(n) x(k-n), (7)
h(n) x(k-n), (7)
где: h(n), n=0, 1, 2, … , N – коэффициенты фильтра, x(k) и y(k) – вход и выход фильтра. Это по сути (см. рис. 2).
На рис. 6.7 показана блок-схема фильтра, который может быть реализован аппаратно.
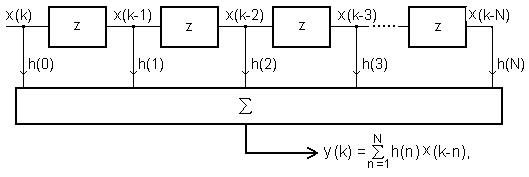
Рис. 6.7.Схема аппаратной реализации фильтра. z – задержка на один интервал дискретизации
По характеру импульсной переходной характеристики фильтры подразделяют на фильтры с конечной импульсной характеристикой или КИХ-фильтры (в англоязычном варианте FIR – finite impulse response) и фильтры с бесконечной импульсной характеристикой или БИХ-фильтры (в англоязычном варианте IIR – infinite impulse response). К БИХ-фильтрам относятся практически все фильтры (Бесселя, Баттерворта, Чебышева и др.), к КИХ фильтрам - фильтры скользящего среднего. БИХ-фильтры могут быть преобразованы в КИХ-фильтры с помощью оконных функций Хемминга, Хеннинга, Блэкмана-Харриса и др. С помощью оконных функций бесконечные частотная или импульсная характеристика фильтра преобразуются в конечные искусственно. Следует помнить, что при этом сигнал в частотном или временном представлении будут искажаться.
Любые виды фильтрации дают позитивный результат в смысле уменьшения помех и шумов, но искажают амплитуду, фазу и частотный спектр сигнала, особенно заметный в случае, если сигнал имеет малую длину (содержит малое количество периодов).
Функциональные преобразования позволяют описывать сигналы с дискретным временем в частотных координатах или переходить от описания во временной области к описанию в частотной. Переход от временных (пространственных) координат к частотным необходим во многих приложениях обработки данных, например, при анализе эхо-сигналов спектрометров. В этом случае информативным параметром сигнала является именно частота, т.к. она однозначно указывает на исследуемое химическое вещество.
Для перехода от временного представления к частотному применяется преобразование Фурье, для обратного перехода от частотного к временному – обратное преобразование Фурье.
Для преобразований без потерь информации число отсчетов функции и ее спектра должны быть одинаковыми.
При цифровой обработке дискретизированных сигналов используется
дискретное преобразование Фурье (ДПФ). Для ускорения вычисления ДПФ количество отсчетов берут равным 2n, а для вычисления используют алгоритм БПФ.
В программах обработки дискретизированных сигналов, представленных в форме числовых массивов, понятия частоты отсутствует и появляется только в том случае, если задать шаг дискретности по времени.
Аналогично этому, в результате выполнения быстрого преобразования Фурье мы получаем числовой массив, который будет представлять «частотный» спектр. Спектр будет отражать не частоту сигнала, установить которую по числовому массиву, представляющему сигнал во временной области, невозможно, а количество периодов во временной области. Т.е. в приведенном выше примере «всплеск» в массиве частотной области будет в элементе с номером 12, что соответствует количеству периодов сигнала во временной области (Time domain). Таким образом, массив частотной области (Frequency domain) укажет на количество периодов сигнала во временной области (Рис.6.8).

 А Б
А Б
Рис.6.8. Отображение дискретизированного сигнала (А) и дискретизированного частотного спектра (Б).
Видно, что БПФ также обладает «противошумовыми» свойствами. Однако, результат (количество периодов во временном окне), полученный с помощью БПФ, будет точным только в том случае, если количество периодов будет целым. Использование БПФ для спектрального анализа позволяет вычислить частотный спектр с высокой точностью, если сигнал содержит большое число периодов. Разрешающая способность БПФ по частоте составляет 1/(N*dt), где N – количество отсчетов, а dt – шаг дискретности измерений по времени.
В ряде случаев необходимо анализировать «короткие» сигналы, например эхо-сигналов спектрометров. При этом количество периодов мало (5-10) и не всегда целое, поэтому точность определения количества периодов и частоты сигнала с помощью БПФ составляет 10-5%. В этом случае для повышения точности определения частоты можно использовать более сложные методы цифровой обработки [5].
Модуляция сигналов.
Системы регистрации, обработки, интерпретации, хранения и использования информационных данных становятся все более распределенными, что требует коммуникации данных по высокочастотным каналам связи. Как правило, информационные сигналы являются низкочастотными и ограниченными по ширине спектра, в отличие от широкополосных высокочастотных каналов связи, рассчитанных на передачу сигналов от множества источников одновременно с частотным разделением каналов. Перенос спектра сигналов из низкочастотной области в выделенную для их передачи область высоких частот выполняется операцией модуляции. При модуляции значения информационного (модулирующего) сигнала переносятся на определенный параметр высокочастотного (несущего) сигнала.
Самые распространенные схемы модуляции для передачи цифровой информации по широкополосным каналам – это амплитудная (amplitude shift keying – ASK), фазовая (phase shift keying – PSK) и частотная (frequensy shift keying – FSK) манипуляции. При передаче данных по цифровым сетям используется также импульсно-кодовая модуляция (pulse code modulation – PCM).
Дата добавления: 2017-01-16; просмотров: 5065;
Поиск по сайту
Узнать еще
- Ocновные операции языка
- Абстрактные операции технологического процесса подготовки ЛА
- Аддитивные операции
- Алгебраические операции над нечеткими множествами
- Арифметические операции
- Арифметические операции
- Арифметические операции в системах счисления используемых вычислительной техникой.
- Арифметические операции над двоично-десятичными кодами чисел

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
