Снятие переходной характеристики (кривой разгона)
Идентификация технологического объекта управления начинается с определения статической характеристики, т.е. изменения выходного сигнала в установившемся режиме работы САУ (стабилизируют режим таким образом, чтобы в момент времени, принимаемый за начало отсчета, выполнялись условия:  ). Подготовка к проведению эксперимента по снятию статической характеристики состоит из следующих этапов:
). Подготовка к проведению эксперимента по снятию статической характеристики состоит из следующих этапов:
· изучение конструкции и технологических режимов работы объекта,
· выбор входного (регулирующего) воздействия,
· стабилизация (если это возможно) источников помех.
Затем выявляются минимальная Xmin и максимальная Xmax границы изменения входной координаты объекта и устанавливается минимально допустимое по технологическому режиму значение  . После окончания переходного процесса tпп вызванного сигналом X1, на выходе объекта устанавливается значение выходного сигнала Y1. Далее дается приращение ΔХ по входной координате Х и формируется новое значение сигнала
. После окончания переходного процесса tпп вызванного сигналом X1, на выходе объекта устанавливается значение выходного сигнала Y1. Далее дается приращение ΔХ по входной координате Х и формируется новое значение сигнала  , который и подается на вход объекта. Спустя время tпп, регистрируется установившееся значение выхода Y2 и т.д. В результате проведения М опытов получается таблица соответствия между Хi и Yi (i=1,2,…M).
, который и подается на вход объекта. Спустя время tпп, регистрируется установившееся значение выхода Y2 и т.д. В результате проведения М опытов получается таблица соответствия между Хi и Yi (i=1,2,…M).
Для линейной статической характеристики (линии регрессии), описываемой уравнением вида  , значения параметров а0 и k находятся в результате решения следующей системы уравнений, полученной методом наименьших квадратов:
, значения параметров а0 и k находятся в результате решения следующей системы уравнений, полученной методом наименьших квадратов:
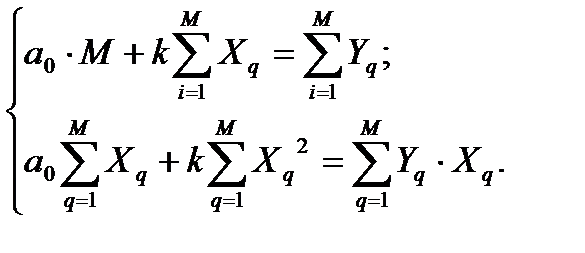 (1)
(1)
После расчета значений а0 и k и определения статической характеристики, выбирается номинальный режим работы объекта Хн и Yн, а также рабочий диапазон изменения выходной координаты  в окрестности Yh.
в окрестности Yh.
Если по технологическому режиму работы известно, что выходная координата объекта изменяется в незначительных пределах (например, не более чем на ±15% от Yн) и статическая характеристика близка к линейной, то изучение статики в малом можно совместить с экспериментом по определению динамической (переходной) характеристики [2-4].
Дата добавления: 2021-05-28; просмотров: 566;
Поиск по сайту
Узнать еще
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Активная мощность и угловые характеристики генератора
- Акустические характеристики устной речи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
