Вектор комплексной огибающей радиолокационного сигнала находится по формуле
 . (4.3)
. (4.3)
Здесь  - поляризационная матрица рассеяния i-го отражателя;
- поляризационная матрица рассеяния i-го отражателя;  - поляризационный вектор падающей волны; N - число освещенных отражателей; r° - единичный вектор падающего поля;
- поляризационный вектор падающей волны; N - число освещенных отражателей; r° - единичный вектор падающего поля;  комплексная огибающая сигнала на выходе устройства оптимальной обработки;
комплексная огибающая сигнала на выходе устройства оптимальной обработки;  - радиус-вектор фазового центра i-го отражателя; fо - несущая частота; с - скорость света в свободном пространстве.
- радиус-вектор фазового центра i-го отражателя; fо - несущая частота; с - скорость света в свободном пространстве.
В процессе вычисления находят с помощью ЭВМ: а) векторы r0 для различных ориентации цели; б) число N блестящих элементов и их координаты с учетом эффектов затенения; в) вклад каждого элемента в сумму (4.3); г) сумму вкладов (4.3).
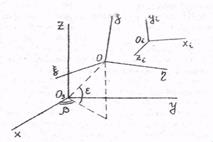
Рис. 4.1. Системы координат наземного локатораОзхуz, воздушной цели Оξηζ и i-й аппроксимирующей поверхности Оixiyizi
На рис. 4.1 показаны Озxyz и Оξηζ – системы координат наземного локатора и воздушной цели; β - азимут и ε- угол места целя в первой системе. Не показаны Ψ,Θ,γ – углы курса, тангажа и крена цели во второй системе. Вошедший в (4.3) единичный вектор r° имеет в первое системе составляющие cosεּcosβ, cosεּsinβ, sinε и определяется во второй системе выражениями
 ; ( 4.4)
; ( 4.4)
 (4.5)
(4.5)
Учет особенностей цели. Ее поверхность аппроксимируется на основе чертежа совокупностью участков поверхностей второго порядка Fi(ξ,η,ζ)=0. Объекту принадлежат лишь точки i-й поверхности (i= 1,2, ... , n), которые лежат внутри неких ограничивающих ее поверхностей  , где k=1, 2, ... , Ki - номер (Ki – число поверхностей, ограничивающих i-ю поверхность).
, где k=1, 2, ... , Ki - номер (Ki – число поверхностей, ограничивающих i-ю поверхность).
Кромки крыльев, киля и стабилизатора задаются клиньями, параметры каждого из них - длина и угол в радианах (см. пункт 5 приложения 4).
Изломы на стыке поверхностей второго порядка аппроксимируются клиньями с изогнутыми ребрами. При этом задают радиус кривизны клина и его внешний раскрыв (см. пункт 5 приложения 4).
Положение воздухозаборников двигателей задают координатами центров входных отверстий. Учитываются параметры двигателей: форма поперечного сечения воздухозаборника, его глубина, число, форма и размеры лопаток компрессора. Кромки воздухозаборника аппроксимируют частями тора или тонкими клиньями (пункты 3, 4 приложения 4).
Координаты центров бортовых антенн и единичные векторы нормали к апертурам антенн описывают положение и ориентацию антенн в системе координат цели. Задаются параметры их раскрыва, рабочая длина волны, фокусное расстояние (для зеркальных антенн), параметры облучателя и некоторые другие характеристики.
Для поверхностей, покрытых радиопоглощающими материалами, задают толщину покрытия, комплексные относительные проницаемости материала, степень неоднородности покрытия, форму укрываемой поверхности или же экспериментальную зависимость коэффициента отражения от углов облучения и наблюдения.
Каждая поверхность второго порядка (ограничивающая в том числе) задается предварительно в своей местной (канонической) системе координат Оixiyizi параметрами уравнений Fi(xi,yi,zi)=0,  .
.
Например, участок цилиндрической поверхности, заданной уравнением Fi(xi,yi,zi)=  . может ограничиваться парой плоскостей, перпендикулярных его оси, описываемых уравнением
. может ограничиваться парой плоскостей, перпендикулярных его оси, описываемых уравнением 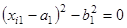 . В этих выражениях а, а1 и b, b1 – параметры поверхностей.
. В этих выражениях а, а1 и b, b1 – параметры поверхностей.
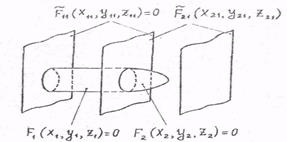
Рис. 4.2. Простейшая цель в виде сочленения, цилиндра (F1) с эллипсоидом (F2) и соответствующие ограничивающие пары плоскостей 
Рис. 4.2 поясняет изложенное на примере простейшей цели в виде сочленения цилиндра с эллипсом. Блестящая точка на поверхности эллипсоида проверяется на ее местонахождение между парой ограничивающих плоскостей  . Блестящая образующая на поверхности цилиндра проверяется на ее местонахождение между парой плоскостей
. Блестящая образующая на поверхности цилиндра проверяется на ее местонахождение между парой плоскостей  .
.
Преобразование координат блестящей точки из местной системы координат в систему координат цели. Описывается выражением
 (4.6)
(4.6)
Здесь Нi - матрица перехода от системы Оξηζк системе Оixiyizi размера 3х3; ξiηiζi - координаты точки Оi в системе Оξηζ . Пересчеты вектораr° в местные системы координат проводятся согласно выражению ri=Hir°
Блестящие элементы при однопозиционной локации. Определяются точками стационарной фазы. Известно, что плоскость фронта волны является касательной к выпуклой поверхности F(х, у, z)= 0 в точке стационарной фазы. Иначе, единичный векторr°, задающий нормаль к фронту волны, коллинеарен вектору grad F, откуда
 (4.7)
(4.7)
где  ,
,  ,
,  – направляющие косинусы, являющиеся проекциями на координатные оси вектора r°.
– направляющие косинусы, являющиеся проекциями на координатные оси вектора r°.
Аналитические выражения для нахождения координат блестящих элементов различных поверхностей второго порядка сведены в приложение 2.
Проверка затенения. Луч, проведенный из блестящей точки (ξσ ησ ζσ) некоторой аппроксимирующей поверхности в направлении на РЛС, не должен пересекать (по Ю.В.Сопельнику) ни один из ограниченных участков других аппроксимирующих поверхностей. Чтобы удостовериться в этом, следует подставить в уравнение i-й (проверяемой) поверхности второго порядка выражения прямой ξ= ξσ -r°ξt, η= ησ -r°ηt, ζ= ζσ -r°ζt . Полученное квадратное уравнение аt2 + bt + c = 0 решается относительно t.
 . (4.8)
. (4.8)
Здесь
 (4.9)
(4.9)
где Рi – матрица 3х3 коэффициентов канонического уравнения i-й поверхности. Если уравнение (4.8) имеет хотя бы одно действительное положительное решение, то данная "блестящая" точка затенена.
Проверка затенения "блестящих" образующих и кромок производится дискретно с шагом Δl . Для плоской поверхности проверяется затенение центра каждой из элементарных площадок ΔSi, на которые она разбита.
Расчет поляризационных матриц элементарных излучателей при однопозиционной локации. Осуществляется в соответствии с выражением  . Здесь
. Здесь  – диагональная поляризационная матрица 2х2 в собственном поляризационном базисе i-го отражателя с диагональными элементами
– диагональная поляризационная матрица 2х2 в собственном поляризационном базисе i-го отражателя с диагональными элементами  ; Ui - это матрица перехода от собственного поляризационного базиса i-го отражателя к поляризационному базису приемно-передающей антенны. Для линейно-поляризованной волны, падающей на прямую кромку, ее элементы равны U11i = U22i = cosφi, U21i = U22i = -sinφi, где φi – угол между вектором поляризации падающего поля и проекцией линии кромки на фронт волны. При вычислениях ЭП элементарных отражателей можно использовать формулы приложения 4, а также [74, 75, 99 - 101, 108 - 112].
; Ui - это матрица перехода от собственного поляризационного базиса i-го отражателя к поляризационному базису приемно-передающей антенны. Для линейно-поляризованной волны, падающей на прямую кромку, ее элементы равны U11i = U22i = cosφi, U21i = U22i = -sinφi, где φi – угол между вектором поляризации падающего поля и проекцией линии кромки на фронт волны. При вычислениях ЭП элементарных отражателей можно использовать формулы приложения 4, а также [74, 75, 99 - 101, 108 - 112].
4.3.3. ДИНАМИЧЕСКИЕ ЦИФРОВЫЕ МОДЕЛИ ВТОРИЧНОГО ИЗЛУЧЕНИЯ
Используют общие принципы цифрового моделирования [114, 116, 117], сочетая моделирование электродинамических процессов, кинематики движения целей и их элементов, статистики помех и методов обработки принимаемых колебаний [1]. Учитывают, в частности, кинематику и динамику: а) детерминированного и случайного движения целей; б) движения элементов целей (лопаток компрессоров и турбин, лопастей винтов) относительно связанных с целями систем координат; в) неодновременного облучения элементов целей моделированными сигналами [1]. В развитие раздела 4.2.1 можно использовать методы математического моделирования для получения ряда важных характеристик вторичного излучения и определения показателей качества алгоритмов распознавания.
Варианты построения динамических моделей
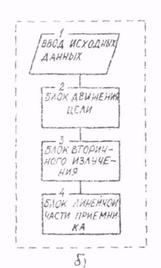
Показаны на рис. 4.3. Исходными данными в первом случае (рис. 4,3, а) служат длина волны, поляризация приемно-передающей антенны, параметры зондирующего сигнала, самих целей, а также составляющие их траекторий (регулярные и случайные).
В соответствии с рис. 4.3,а следовало бы моделировать: а) прохождение сигнала от РЛС к цели (блок 2); б) регулярное и случайное движения цели (блок 3); в) вторичное излучение цели (блок 4); г) прохождение сигнала от цели к РЛС (блок 5); д) работу линейной части приемного устройства (блок 6).
В предположении линейности среды распространения, процесса вторичного излучения и обработки сигнала модели роение упрощается. Моделируется последовательно (рис. 4.3,6): а) регулярное и случайное движение цели (блок 2); б) расчет координат и амплитуд элементов матриц рассеяния блестящих точек цели (блок 3); в) работа линейной части приемника. В последнем блоке проводится согласно (4.3) расчет комплексной огибающей отраженного сигнала на выходе фильтра, согласованного с зондирующим сигналом. Описанная модель позволяет получать временные, частотные, поляризационные зависимости отраженных сигналов при различных значениях ширины спектра зондирующего сигнала.
Примеры моделирования приводились на рис. 1.2 - 1.8. 1.12 - 1.21.
|

Рис. 4.3. Варианты построения динамических и цифровых моделей вторичного излучения: без учета (а) и с учетом (б) линейности среды распространения процесса вторичного излучения и обработки сигнала
4.4. МЕТОДЫ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЕЙ КАЧЕСТВА
РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ
Подразделяются на: а) натурные; б) методы физического моделирования; в) методы математического моделирования. К определяемым показателям качества работы систем распознавания относят матрицы условных вероятностей распознавания, а также полные вероятности ошибок распознавания при равномерном появлении целей различных классов для различных ракурсов, дальностей (отношений сигнал/шум), условий помеховой обстановки и т.д. Сопоставлению могут подлежать также: а) реализуемый алфавит распознаваемых классов целей; б) коэффициент сокращения зоны распознавания по целям i-го класса относительно зоны обнаружения; в) временные характеристики распознавания (периодичность и число обращений к цели); г) пропускная способность канала распознавания (например, число распознаваемых целей в минуту); д) аппаратурные затраты и вычислительная сложность; е) степень влияния на другие режимы работы РЛС; ж) помехозащищенность от активных и пассивных помех; з) имитостойкость; и) вопросы электромагнитной совместимости при использовании специальных видов сигналов.
4.4.1. НАТУРНЫЕ МЕТОДЫ
Могут быть реализованы в полигонных экспериментах на РЛС с каналами радиолокационного распознавания по специальным методикам. Как и при любых других испытаниях, должны быть заранее установлены оцениваемые показатели качества и способы их оценки; алфавит распознаваемых классов, а значит, требуемые летные средства и средства траекторного анализа; порядок набора, регистрации, отбраковки и обработки экспериментальных данных. Полезно сочетание натурного эксперимента и моделирования (см. разд. 4.2.2 и 4.3.3).
4.4.2. МЕТОДЫ ФИЗИЧЕСКОГО МОДЕЛИРОВАНИЯ
Возможно использование как электродинамического, так и акустического моделирования (см. разд. 4.2.2, 4.2.3). Последнее рассматривается как предварительная мера или как дополнение по отношению к методам натурных испытаний. Используется для: а) определения показателей качества макетов устройства распознавания; б) имитации возможной обстановки при натурных испытаниях РЛС с каналами распознавания (например, с помощью малоразмерных отражателей, поднимаемых на метеозондах); в) определения показателей качества и сопоставления алгоритмов, использующих различные сочетания признаков распознавания (совместно с методами математического моделирования).
4.4.3. МЕТОДЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ
Наиболее оперативны и экономически выгодны для проведения предварительных исследований. Могут использоваться для: а) сопоставления алгоритмов распознавания; б) сопровождения и обеспечения натурных испытаний, в) выявления и исследования новых признаков распознавания. В качестве данных для моделирования могут применяться данные натурных измерений, вспомогательных физического и математического моделирования.
Блок-схема математической модели для последнего случая приведена на рис. 4.4. Дополнительно к рис. 4.3,б введены: а) блок шумов и внешних помех с учетом линейной частя приемника (блок 5); б) блок принятия решений (блок б); в) блок оценки результатов распознавания (блок 7). Блок шумов и внешних помех предназначен для моделирования распознавания на фоне внутренних шумов приемника, а также в условиях активных и пассивных помех. В блоке принятия решений моделируется алгоритм (или несколько разновидностей алгоритмов) распознавания. Перед блоком принятия решений в ряде случаев необходим блок выделения признаков распознавания. В этот блок могут входить, например, алгоритмы получения одномерных или двумерных радиолокационных дальностных или дальностно-угловых портретов. Блок оценки результатов распознавания содержит алгоритмы статистической обработки потока принимаемых решений с учетом условий распознавания и расчета показателей качества распознавания.
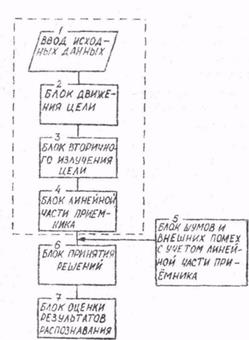
4.4. Блок-схема математической модели для определения показателей качества распознавания
4.4. ПРИМЕРЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ РАСПОЗНАВАНИЯ
ВОЗДУШНЫХ ЦЕЛЕЙ ПО СОВОКУПНОСТИ ПРИЗНАКОВ
Моделирование проводилось в соответствии с блок-схемой рис. 4.4. Модели целей составлялись в соответствии с методикой разд. 4.3.2. В зависимости от размера объекта модели содержали от тридцати до двухсот элементов. Моделировались различные варианты словарей признаков, алфавитов классов и алгоритмов распознавания.
Вводились, в частности, следующие варианты словарей признаков: СП1 – корреляционная сумма (2.19) + эффективная площадь, полученные по ДП цели при одном обращении к ней пачкой широкополосных сигналов; СП2 - словарь признаков СП1 + эффективная площадь, измеренная по результатам 10 - 15 узкополосных зондирований; СПЗ - словарь признаков СП2 + признак, связанный с флюктуациями формы ДП внутри пачки широкополосных импульсов; СП4 - словарь признаков СП3 + траекторные признаки (скорость, высота и их первые производные по времени).
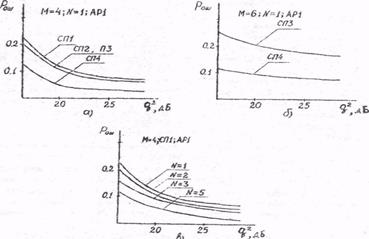
Рис.4.5. Результаты моделирования распознавания воздушных целей: а - для различных словарей признаков СП1– СП4 и алфавит М = 4 (N=1, AP1); б – для различных словарей признаков СПЗ - СП4 и алфавита М = 6 (N=1, АР1); в – для различною числа обращений к цели широкополосным сигналом N = 1, 2, 3, 5 (М=4, СП1,.АР1)
Алфавит распознаваемых классов М = 4 включал в себя классы целей крупных, средних и малых размеров, а также малоразмерных целей с искусственно увеличенной эффективной площадью. В алфавит классов М = 6 дополнительно входили классы вертолетов и метеозондов. В каждый из распознаваемых классов входило от одного до трех типов целей.
Моделировалась работа следующих алгоритмов распознавания: АР1 – аддитивный частично параметризованный байесовский алгоритм (разд. 2.2); АР2 – алгоритм взвешенного голосования (2.28); АРЗ – алгоритм простого голосования (2.29); АР4 – алгоритм минимума расстояний (2.21). (2.22).
Приводимые ниже варианты зависимостей полной вероятности ошибки распознавания Рош (см. разд. 1.9) от отношения сигнал/шум q2, дБ, рассчитаны лишь на качественное пояснение возможностей моделирования. Имеется в виду, что количественные параметры предполагаемых вариантов распознающих систем устанавливаются в ходе проектирования и здесь поэтому не уточняются.
На рис. 4.5, а приведены зависимости Рош (q2) для различных вариантов словарей признаков СП1 - СП4, алфавита классов М = 4, одного обращения к цели широкополосным сигналом (N = 1) и алгоритма АР1.
На рис. 4.5, б показано влияние на Рош (q2) выбора словарей признаков СПЗ и СП4 пои расширенном алфавите классов М = 6 для алгоритма АР1.
Рис. 4.5, в иллюстрирует возможности повышения качества распознавания (снижение суммарной ошибки распознавания) при увеличении числа N обращений к цели широкополосным сигналом для алфавита М = 4, словаря признаков СП1 и алгоритма АР1.
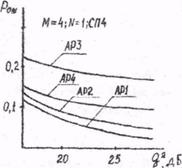
На рис. 4.6 показано влияние на Рош (q2) выбора алгоритма распознавания АР1 - АР4 для алфавитаМ = 4, словаря признаков СП4 и для одного обращения к цели широкополосным сигналом.
Некоторые особенности моделирования распознавания на основе двумерных дальностно-азимутальных портретов целей обсуждаются в приложении 5, а на основе нейрокомпьютерных и нейробайесовских алгоритмов - в приложении 6.
|
Рис. 4.6. Результаты моделирования распознавания М = 4-х классов воздушных целей различными алгоритмами (АР1 - АР4) при одном (n = 1) обращении к цели широкополосным сигналом для наиболее широкого из исследовавшихся словаря признаков СП4
Дата добавления: 2021-02-19; просмотров: 780;
Поиск по сайту
Узнать еще
- N.B. Шаблон проекта находится в группе шаблонов «Тест».
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- А. В трубке находится раствор, стакане — дистиллированная вода.
- Алгоритм моделирования процесса управления комплексной информатизацией образовательных систем на основе функционального подхода
- Алгоритм разложения сигнала по неортогональному базису
- Аналітичне визначення головного вектора та головного моменту
- Арифметичні операції над векторами.
- Б) Изображения синусоидальных величин в векторной форме

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
