Выбор курсов подхода
При большой погрешности текущего места судна курсы подхода к побережью следует выбирать особым образом – так, чтобы обеспечить гарантированное обнаружение, опознание побережья и определение места судна по береговым ориентирам до подхода к навигационным опасностям (рис. 35.1).
 (35.3)
(35.3)
где  – предельная радиальная погрешность текущего места судна при подходе к побережью;
– предельная радиальная погрешность текущего места судна при подходе к побережью;
DОП– расстояние от «приметного» ориентира до опасной изобаты в секторе вероятных курсов подхода к побережью;
DОМС , DЗН– расстояния, на которых должна обеспечиваться возможность определения места судна по данному ориентиру и возможность надежного опознания ориентира соответственно;
ДОБН– требуемая дальность обнаружения ориентира при данных условиях плавания.
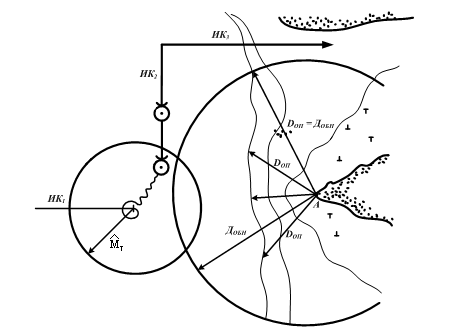
Рис. 35.1. Выбор курса подхода к берегу при большой погрешности в месте судна
При отсутствии особых рекомендаций, в общем случае, для подхода к побережью выбирается приглубый участок, чистый от подводных опасностей, где имеется характерный, далеко видимый ориентир, надежно опознаваемый на экране РЛС. Курс судна прокладывается прямо на такой ориентири по возможности перпендикулярно к изобатам.После обнаружения и опознавания такого ориентира относительно него опознается вся открывающаяся обстановка и определяется место судна.
При этом важнейшей задачей является – обеспечение выхода судна к побережью в пределах надежной дальности обнаружения «приемного» ориентира (ДОБН). Вероятность обнаружения такого ориентира определяется функцией Лапласа(см. табл. 18.1):
 (35.4)
(35.4)
по табл. 1б «МТ-75» (с. 61) или по табл. 4.7 «МТ-2000» (с. 395).
Следуя принципу «Считай себя ближе к опасности», СКП текущего места судна по направлению, перпендикулярному курсу (МТ )⊥ , можно принимать равной радиальной (круговой) СКП текущего места, то есть (МТ)⊥ ≈ МТ. Так, если МТ ≤1/3 (ДОБН), то вероятность Р = 0,997, то есть обнаружение ориентира практически гарантируется.
При больших погрешностях текущего места, не гарантирующих попадание судна в зону видимости «приемного» ориентира, курс судна прокладывается таким образом,чтобы выйти к побережью в заведомо определенной стороне (справа или слева) от заданного ориентира и, обнаружив побережье, уверенно поворачивать в сторону ориентира.
Этот прием вполне применим при подходе к однообразному побережью с редкими ориентирами.
При отсутствии возможности определения места судна даже единственная линия положения позволяет не только уменьшить площадь вероятного места судна, но и обеспечить более точный выход в заданную точку (точку А). Для этого необходимо (рис. 35.2):
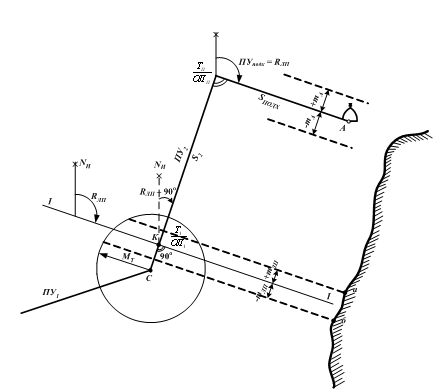
Рис. 35.2. Выбор курса подхода при плавании судна по счислению
1. → проложить обсервованную линию положения I-I на путевой карте, снять ее направление RЛП, перенести счислимое место судна (т. С) в определяющую точку К на линию положения;
2. → проложить путь подхода к заданной точке параллельно полученной линии положения ПУПОДХ = RЛП;
3. → кратчайшим и безопасным путем ПУ2 = RЛП ± 90° выйти на линию курса подхода:tП=S2 / V; TП = Т1 + tП; РОЛ=S2 / KЛ ; ОЛП = ОЛ1 + РОЛ .
4. → в момент ТП/ОЛП лечь на ПУПОДХ = RЛП и следовать им до выхода в заданную точку (т. А).
Ширина полосы выхода (± mА) оценивается формулой:
 (35.5)
(35.5)
где mЛП– СКП обсервованной линии положения на Т1, (мили);
mS2 – СКП плавания судна по ПУ2, (мили);
mПУ – СКП в путевом угле судна при плавании курсом подхода, (°);
SПОДХ– плавание судна курсом подхода, (мили).
Чем сложнее условия, ниже точность линии положения, больше S2 и SПОДХ, тем шире полоса выхода в назначенную точку (т. А), ограниченную ±mА.
Плавание может осуществляться и непосредственно по обсервованной линии положения при использовании ее в качестве ведущей. При этом различают два случая, навигационные возможности которых также резко различны:
1. → Если обсервованная линия положения получена на основе измерений, которые нельзя повторить (ВЛП), то она способна вывести судно лишь на произвольный участок побережья а-б (рис. 35.2), случайно оказавшийся на ее продолжении, а ширина полосы выхода:
 (35.6)
(35.6)
2. → Если же данный навигационный параметр возможно измерять (контролировать) непрерывно или, по крайней мере, достаточно часто, то можно выбрать такую ведущую изолинию, следуя по которой судно выйдет в заданную точку.
Проложив, например, линию ведущего радиопеленга на КРМК через приемный буй, можно, используя радиопеленгатор, вывести судно на буй с СКП:
 (35.7)
(35.7)
где Dб – расстояние от КРМКА до приемного буя, (мили).
Вероятность обнаружения приемного буя:
 (35.8)
(35.8)
Курс судна прокладывается на середину полосы движения СРД только в том случае, если не более ½ ширины полосы, то есть если:
 (35.9)
(35.9)
В противном случае курс прокладывается на S= от границы зоны разделения СРД с тем, чтобы исключить случайный заход судна в зону разделения из-за погрешностей счисления. При больших возможных погрешностях текущего места судна, может быть, более благоразумно прокладывать курс в стороне от СРД, на достаточном расстоянии от нее.
При прокладке курса на середину полосы движения СРД вероятность попадания судна в полосу описывается функцией Лапласа:
 (35.10)
(35.10)
значит, если (МТ)≤ В/6, то Р = 0,997, т.е. попадание в полосу практически гарантировано.
Дата добавления: 2021-01-26; просмотров: 762;
Поиск по сайту
Узнать еще
- IV. Выбор способа ориентации изображения.
- IV. Выбор способа формирования фонда капитального ремонта
- Z-тест для сравнения выборочной доли со стандартом
- АВТОМАТИЧЕСКИЙ ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ
- Автоматический выбор шага. Правило Рунге
- Алгоритм выбора технологии обучения
- Алгоритм моделирования процесса управления комплексной информатизацией образовательных систем на основе функционального подхода
- Алгоритм функционально-структурного подхода.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
