Контроль за местом судна
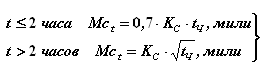
Основной метод контроля за местом судна в открытом море – корректируемое счисление.При длительном отсутствии обсерваций полоса движения судна имеет вид расширяющегося сектора. СКП счисления оценивается формулами:
 (33.4)
(33.4)
а СКП счислимого места судна на любой момент времени:
 (33.5)
(33.5)
Типичные для транспортных судов значения КС даны в таблице 33.1.
Коэффициент точности счисления
Таблица 33.1.
| Режимы счисления, условия плавания | КС | |
| Автоматическое счисление (АПИ РНС, НАК): | – в комплексе с абсолютным лагом | 0,4 |
| – в комплексе с относительным лагом | 0,6 | |
| Ручное графическое счисление: | – закрытые моря со слабыми течениями | 0,9÷1,2 |
| – моря с сильными переменными течениями | 1,5÷1,8 | |
| – моря с сильными постоянными течениями | 2,0÷2,4 | |
| – океаны при нормальных погодных условиях | 1,8÷2,4 | |
| – океаны при штормовой погоде | 3÷4 |
Надежность и точность счисления обеспечиваются исправной работой судовых средств счисления, достоверностью учитываемых поправок, правильным учетом влияния ветра и течения на судно, а также точностью удержания судна на курсе. Поправка гирокомпаса (ΔГК) должна проверяться 1÷2 раза в сутки по небесным светилам, показания гирокомпаса (ГК) и магнитного компаса (МК) должны сличаться ежечасно и после выполнения поворотов.
Счисление пути судна контролируется равенством отрезков между счислимыми точками, проложенными через равные промежутки времени (Δt), а главным образом – обсервациями.
Если обсервации выполняются регулярно, а счисление пути ведется автоматически, то от графического счисления высокой точности не требуется, прокладка ведется на генеральных МНК.
Счислимое место судна отмечается на линии пути при смене вахт, обсервациях, изменениях курса или скорости судна, а также по указанию капитана или по усмотрению ВПК.
При наличии автосчислителя (АПИ РНС, НАК) счислимые точки переносятся на путевую МНК с указанной капитаном дискретностью и обозначаются условным знаком (  ).
).
Определения места судна нужны для контроля за движением судна по заданному маршруту с требуемой точностью.
В соответствии с требованиями ИМО, предельная радиальная (Р = 0,95) погрешность текущего места судна не должна превышать 4,0 мили. Этим требованиям удовлетворяют спутниковые РНС и наземные РНС типа «Декка», «Лоран-С», «Чайка», «Марс-75».
Определения места судна по РНС должны выполняться через равные промежутки времени (Δt) в пределах допустимой дискретности (периодичности) обсерваций (см. табл. 24.2),с последующим анализом серии обсерваций по определению фактических элементов движения судна.
При наличии РНС, астрономические обсервации становятся резервным способом, при этом для ускорения и повышения надежности вычислений необходимо использовать программируемый микрокалькулятор (ПМК).
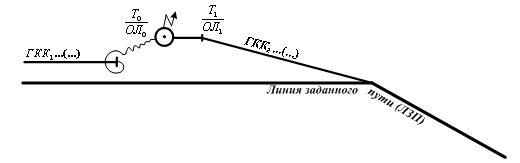
Рис. 33.1. Выход на ЛЗП
Если под действием неучтенных гидрометеорологических факторов, из-за погрешностей счисления или по какой-то иной причине судно значительно уклонилось от линии заданного пути (ЛЗП), то возвращение на прежнюю ЛЗП лишь удлинит переход. Вместо этого из текущего места судна (на Т1 рис. 33.1) рассчитывают новый (ГКК2) кратчайший (или наивыгоднейший) путь на заданную конечную точку (точку поворота).
Дата добавления: 2021-01-26; просмотров: 821;
Поиск по сайту
Узнать еще
- III. Контроль эффективности
- S Власть и контроль
- V — скорость судна, м/с.
- V. Контроль за корректурой СККРиПДП.
- VII. ОБСЛЕДОВАНИЕ ПОМЕТОВ И КОНТРОЛЬ КАЧЕСТВА ИХ ВЫРАЩИВАНИЯ
- А) Контроль отклонений от правильной цилиндрической формы.
- А. Классификация контрольных приспособлений
- Автоматизация и контроль. Диспетчеризация

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
