Отыскание вероятнейшего места в фигуре погрешностей центрографическим методом
Центрографический метод применяется в том случае, когда обсервованное место определяют по разнородным линиям положения (визуальный пеленг и радиопеленг, радиопеленг и высота светила и т.д.), т.е. когда погрешности линий положения различны.
В этом случае каждая вершина фигуры погрешности рассматривается как отдельно взятое место.
Схема решения задачи показана на рис. 24.14.
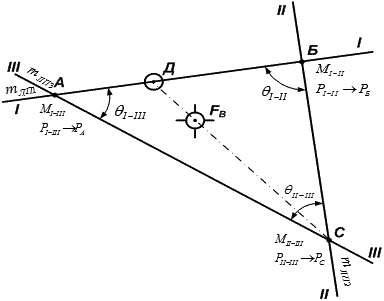
Рис. 24.14. Нахождение вероятнейшего места в фигуре
погрешностей центрографическим методом
1. Измеряются углы пересечения линий положения у каждой вершины фигуры погрешности (θ) и рассчитываются СКП каждой линии положения (mЛП).
2. По формуле:
| (24.5) |
3. рассчитывают радиальную (круговую) СКП каждой вершины фигуры погрешности (точка А → МI-III, точка Б→ МI-II, точка С → МII-III).
4. По формуле (24.1) (  ) рассчитываются веса вершин углов фигуры погрешности (РI-III → точка А, РI-II → точка Б, РII-III → точка С).
) рассчитываются веса вершин углов фигуры погрешности (РI-III → точка А, РI-II → точка Б, РII-III → точка С).
5. На одной из сторон фигуры погрешности (например: стороне АБ) центрографическим приемом определяется средневесовое место (ДАБ). Вес полученного места будет равен сумме весов вершин А и Б (РД = РА + РБ).
6. Применив центрографический прием к средневесовому месту точки Д и вершине С, определяется новое средневесовое место точка FВ, которое и будет вероятнейшим обсервованным местом в фигуре погрешности. Вес этого места будет равен сумме весов всех вершин фигуры погрешности (РF = РА + РБ + РС = РД + РС).
7. По формуле (24.2) (  ) рассчитывается значение радиальной (круговой) СКП вероятнейшего места судна.
) рассчитывается значение радиальной (круговой) СКП вероятнейшего места судна.
| Задача. | При определении места судна по 3-м линиям положения получили на путевой карте фигуру погрешности (рис. 24.15). Центрографическим методом определить вероятнейшее место в фигуре погрешности и рассчитать его точность. |
Решение:
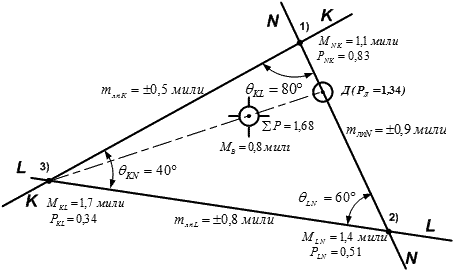
Рис. 24.15. Примеры нахождения вероятного места центрографическим методом
1. Рассчитали СКП линий положения: mЛПКК = 0,5 мили; mЛПLL = ± 0,8 мили; mЛПNN = ± 0,9 мили.
2. Измерили углы θ под которыми пересекаются эти линии положения: θKL = 40°; θKN = 80°; θLN = 60°.
3. По формуле (24.5) рассчитали значения МО вершин углов: 1) МNK = 1,1 мили; 2) МLN = 1,4 мили; 3) МKL = 1,7 мили.
По формуле (24.1) рассчитали веса вершин углов фигуры погрешности: 1) РNK = 0,83; 2) РNL = 0,51; 3) РLK = 0,34.
4. Центрографическим приемом определили вероятнейшее место в фигуре погрешности и рассчитали его вес.
5. По формуле (24.2) ( ) рассчитали радиальную (круговую) СКП этого вероятнейшего места

Дата добавления: 2021-01-26; просмотров: 737;
Поиск по сайту
Узнать еще
- I. Идентификация потенциально вредных и (или) опасных факторов на рабочих местах.
- VIII Места занятий, оборудование и спортивный инвентарь
- А теперь рассмотрим критерии исключения грубых погрешностей или промахов.
- А) в средних рядах; б-д) в крайних рядах; е) в торцах; ж-и) в местах перепада высот, деформационных и температурных швов (на парных колоннах)
- А) Расчет электрической цепи методом свертывания
- Автоматизированные рабочие места, назначение и их виды
- Автоматизированные рабочие места: назначение, состав, виды обеспечения
- Алгоритм расчета переходных процессов операторным методом

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
